一种水下电动清洗装置的研究设计
2018-05-16宋晓暖温亚楠朱建鑫
宋晓暖, 温亚楠, 朱建鑫
(青岛市光电工程技术研究院,山东青岛 266000)
0 引 言
随着海洋经济的发展,当今世界各国在海洋研究、港口勘察、海底矿产勘测、水下工程以及海洋牧场等领域研制了大量水下装备。各类水下装备几乎都配有水下摄像和照明系统,如水下机器人、水下监测平台等,尤其在海洋牧场中水下摄像和照明系统更被大量采用。由于部分水下装备需要长期在水下工作,故现今水下摄像机系统面临如下主要难点:由于水下摄像装置长期工作在水下,尤其是海洋领域,海洋中微生物种类繁多,环境因素复杂多变,造成摄像机透明视窗和照明灯装置透明视窗很容易被生物附着而影响视频画面拍摄。传统方式是将其打捞到岸上进行定期清洁,不免造成时间消耗从而影响水下监测的进度,同时提高了作业成本[1]。针对解决此类问题的需要,研究开发一种可以长期、连续、可靠地在水下自动清洗摄像和照明等系统玻璃窗口的装置十分必要,并且应用前景广阔。
1 系统设计要求
水下电动清洗装置主要作业对象,是针对长期位于水下工作的摄像和照明系统的玻璃窗口或其他需要清洗的平面结构,因此需要具有以下主要功能:1)较长期、连续、可靠地在水下按预定指令自动完成清洗工作;2)满足0~1 MPa压力环境下正常工作;3)具有远距离实时操控、监控、集成联网功能;4)具有良好的模块化、通用化设计和产品适配性;5)物美价廉,适合不同环境下大规模配套使用。
2 系统设计
2.1 系统组成
水下清洗技术的发展分为3个阶段:第1阶段为手工操作阶段,由潜水员下水进行清洗工作;第2阶段为机械操作阶段,由专用清洗器、涂装机等机械完成大型船舶的清洗任务,具有较高的工作效率;第3阶段为遥控机械或机器人作业阶段,为在恶劣海洋环境下开展清洗工作提供了保障[2]。
该水下电动清洗装置是水下清洗技术发展到第3阶段的具体体现,装置由两部分组成,一是水上便携式操控终端,既能实现水下摄像机的视频数据接收、存储、播放等功能,也能实现对水下电动清洗装置的远程控制;二是位于水下清洗作业的水下电动清洗装置主机。本文主要针对该水下电动清洗装置主机部分进行研究设计,其主要由水下电动机、传动机构、清洗刷以及辅助安装结构组成。水下电动清洗装置主机工作状态示意图如图1所示。
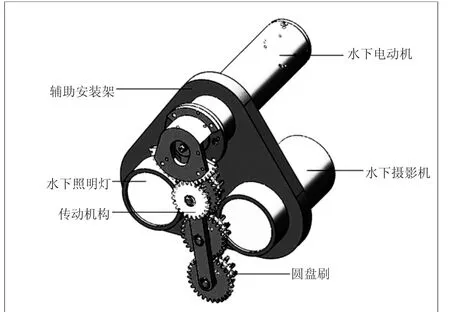
图1 水下电动清洗装置主机工作状态示意图
2.2 水下电动机设计
水下电动机是水下电动清洗装置主机的关键部件。目前,水下电动机的设计主要有以下几种方法:第一种为“气球法”,选用普通电动机,根据普通电动机的外形尺寸设计一个外壳,壳体采用静密封,电动机输出轴采用动密封,缆线接口采用成熟的水密插头;第二种为“压力补偿法”,由于压力改变引起“泵吸现象”(压力改变所致压缩和扩张运动会使水通过密封薄弱处的小裂纹漫漫渗入电动机内),所以将电动机内部注满油,并利用光导调压模、内置水压、油压循环润滑装置和隔膜补偿平衡[3];第三种方法是一体化水下电动机,主要解决电动机的水密和系统体积、重量等问题,针对水下使用要求,根据电动机开发原理,专门研制一型特种电动机。

图2 水下电动清洗装置水下电动机结构示意图
考虑到该水下电动机的可靠性和经济性,同时缩短开发周期,因此本文选用了一型普通直流有刷电动机封装成水下电动机的方法,俗称“气球法”。选用成熟的陆上普通直流有刷电动机作为封装对象,主要有以下优势:1)包括电动机本身以及对应的控制系统成熟、可靠,同时规格多样;2)封装后的水下电动机通用性好,可以满足不同水深下的不同使用需求;3)水下电动机投入的研发成本低、开发周期短,具有良好的价格优势。
该水下电动机主要由输出轴、前端盖、普通直流有刷电动机、控制模块、输出轴位置检测单元、筒体、后端盖、密封件等主要部分组成,组成该水下电动机的结构零部件均采用防海水腐蚀的金属材料加工制造。
2.2.1 水下电动机主要参数
该水下电动机的主要物理参数:型号为UM-DPN-24-40-52S-D100;有刷直流型式;额定电压24 V;额定功率40 W;额定转速52 r/min;深度等级≥100 m;尺寸为φ65 mm×260 mm;质量约2 kg。
2.2.2 水下电动机密封设计
密封设计是水下电动机设计的关键,密封一般分为静密封和动密封。常见的密封形式有:O形密封圈密封、O形密封圈与聚四氟乙烯滑环组合密封、机械密封和磁流体密封等。
1)静密封设计。筒体,前、后端盖构成一个密封壳体,属于静密封问题。为此,在前、后端盖处采取O形密封圈的方法,凡与O形密封圈接触的地方不得有毛刺及锐角以防O形密封圈被划伤[4]。O形密封圈的一般通用橡胶材料有:丁苯橡胶、顺丁橡胶、氯丁橡胶、丁基橡胶和丁腈橡胶;特种橡胶材料有:乙丙橡胶、氯磺化聚乙烯橡胶、丙烯酸酯橡胶、硅橡胶、氟橡胶等[5]。为了防止海水的强烈腐蚀,所以O形密封圈采用丁腈橡胶材料,以保证接触海水杂质后不会变形而失去密封效果。
电动机引出线处同样是静密封,根据水下环境使用和可靠性要求,此处一般采用成熟水密接插件产品,用于水下电动机与外部电源或者控制终端连接。产品采用橡胶注塑,面板安装采用黄铜或不锈钢,具有体积小、质量轻、耐磨、高可靠性,通过螺纹、密封圈安装在壳体后端面上,既可以很好地实现水下电动清洗装置的供电和控制,也可靠地实现密封。
2)动密封设计。水下电动机密封中最难解决的问题之一是输出轴的动密封。因为电动机轴的旋转,轴与壳体处就有间隙存在,如果仍采取在轴与壳体间加O形密封圈的密封方法,当电动机高速旋转时,可能会导致O形密封圈的磨损、发热乃至变形,在较高的水压下就容易漏水。
针对动密封问题,在此采取组合密封,即O形密封圈与聚四氟乙烯滑环组合密封,俗称格莱圈密封,实质是将轴与壳体之间的间隙转换为静环与动环之间的间隙。旋转格莱圈由一个橡胶O形密封圈及聚四氟乙烯圈组合而成,最大使用压力0~30 MPa,依其本身的变形对密封表面产生较高的初始接触应力,压力液体通过O形密封圈的弹性变形最大限度地挤压方形密封圈,使之紧贴密封表面而产生较高的随压力液体的压力增高而增高的附加接触应力,并与初始接触应力一起共同阻止压力液体的泄漏。
因此该水下电动机动密封设计的具体方法是在延长输出轴和前端盖结合处采用两道旋转格莱圈组合密封,并且其中一道是轴用旋转格莱圈,另一道是孔用旋转格莱圈,分别安装在前端盖中的沟槽里和延长输出轴的沟槽里,这样既达到了动密封的目的,也提高了密封的可靠性。
2.2.3 水下电动机耐压设计
由于水下设备需要长期、持续地承受水下压力,因此设备的耐压设计也是一个设计重点。该水下电动机主要通过圆柱筒体,前、后端盖承受外压,属于外压圆筒设计,可根据相关规范设计。但由于封装的需要,额外设计增加了一根延长用输出轴,因此为了保证该水下电动机能够长期可靠地在水下工作,避免外压通过延长输出轴对壳体内的直流电动机产生影响,所以在前端盖和输出轴处配有轴向推力球轴承,以保证水下电动机长期使用的可靠性。
2.2.4 水下电动机传输控制
对水下电动机的控制,采用水下复合缆,将电源线和控制线经过屏蔽、水密处理复合到一根缆线中。水面控制单元通过复合缆与水下电动机控制模块连接,同时也可以将水下摄像机和水下照明灯接入到水面控制单元,以实现集成化设计,既能实现水下视频的传输、存储、播放等,也能实现对水下电动清洗装置的控制。
2.3 传动机构和清洗刷设计
水下电动清洗装置的传动机构同时也是清洗装置。刷杆顶端与水下电动机输出轴固定,实现往复摆动。根据需要刷杆一侧一字型布置多个小行星轮并相互啮合,并且每一个小行星轮连接一个圆盘刷,同时最上端的一个行星轮与固定在水下电动机前端法兰上的太阳轮啮合。刷杆在水下电动机的驱动下往复摆动从而带动行星轮旋转,也从而带动了圆盘刷的旋转。刷杆的往复摆动和圆盘刷的旋转将与刷毛接触的玻璃窗口上的杂质或生物扫除,从而使杂质或生物不会在玻璃窗口附着,保持了玻璃窗口的洁净,从而保证了玻璃窗口的通透性。

3 结语
经过分别对水下电动机和水下电动清洗装置整机的试验测试,结果表明该装置可以长期、连续可靠地在水下环境工作;同时对水下玻璃窗口的清洗效果满足设计要求。
[参考文献]
[1] 马秀芬,初文怡.一种视窗清洁式水下摄像机:CN2016210719044[P].2017-03-15.
[2] 郦智斌,龙彪.船舶水下清洗技术研究[J].中国修船,2011,24(5):33-36.
[3] 王力,杨邦清.水下一体化伺服推进电动机:CN200910211178X[P].2013-06-05.
[4] 刘子俊,崔皆凡.海洋机器人用水下电动机的深水密封研究[J].机器人,1997,19(1):62-64.
[5] 孟永奇,宋宏.浅谈潜水电动机动密封技术[J].机械管理开发,2009,24(2):19-20
