焊接机器人运动分析及轨迹优化
2018-05-14张茜黄文静高南
张茜 黄文静 高南
摘 要:本项目的主要任务是提高焊接机器人的焊接品质。在分析国内外现有的工业机器人相关技术的基础上, 首先建立六自由度焊接机器人的运动学模型,接着对六自由度工业机器人的平滑轨迹规划方法进行研究,找到一种适用于各关节运动的调速曲线。利用此文的优化方案,使六自由度焊接机器人的焊接轨迹更加平滑,提高了焊接质量。
关键词:焊接机器人;六自由度;机器人运动分析
1 运动学模型建立
1.1 六自由度焊接机器人运动学模型
六自由度焊接机器人末端执行器的位置和姿态与机器人各关节角度之间的关系是非线性的,基于此,Denavit和Hartenberg提出了一种表示机器人坐标系的通用约定,称为D-H运动学模型。该约定采用四参数确定一个坐标系相对于另一坐标系的位姿。这4 个参数分别是:连杆长度ai,杆扭转角αi,关节偏移量di,关节角θi
1.2 正向运动学
机器人正运动学是在给定关节位置和杆件几何参数的情况下,求解末端执行器相对固定参考坐标系的位置和姿态,按照D-H杆件坐标系规则建立如图2六自由度机器人连杆坐标系模型。
设i-1Tii-1Ti表示i坐标系相对于i-1坐标系的位置和姿态,对于六自由度机器人,可以得到机器人末端执行器位姿相对于固定参考坐标系的变换矩阵:
已知机器人的六个关节角矢量,代入式2,可以求出末端执行器相对参考坐标系或者任意其他变化得来的坐标系的位置姿态。
1.3 逆向运动学
在求解逆向运动学时一般采用封闭解法,效率和可靠性较高。六自由度机器人具有逆运动学闭式解的充分条件为:①三个连续的旋转式关节的轴线相交于一点,如球面式腕部。②三个连续的旋转式关节的轴线平行。 本文采用代数法来进行求解:一种常用的策略是简化为单变量的超越方程,如
2 基于目标距离的六自由度机器人轨迹算法研究
2.1 运动规划
对机器人运动轨迹进行规划时,需要研究機器人在关节空间和任务空间中的插补以及轨迹生成方法,找到既不能对机器人的硬件系统有所损耗、又要能保证高效的完成规划路径的轨迹规划算法。
本课题采用了以目标距离为原则的调速方式。目标距离值的确定:当焊接机器人实时关节末端与焊点之间的距离大于机器人主控器所能传递的最大距离值时,则目标距离值等于最大距离值。当焊接机器人实时关节末端与焊点之间的距离小于机器人主控器所能传递的最大距离值时,则目标距离值等于此距离值。
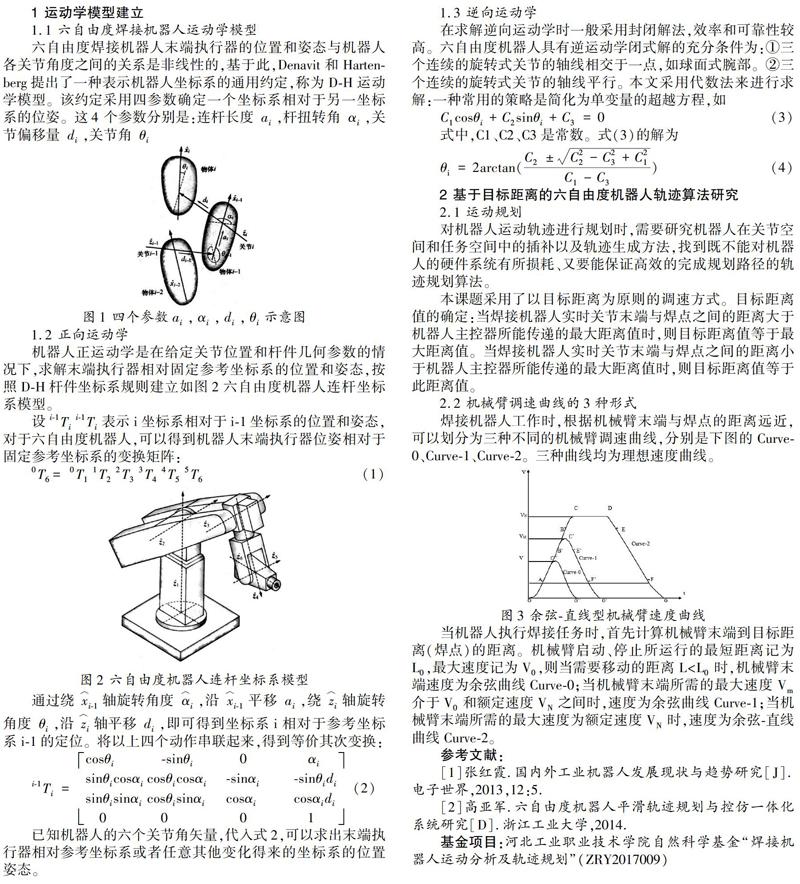
2.2 机械臂调速曲线的3种形式
焊接机器人工作时,根据机械臂末端与焊点的距离远近,可以划分为三种不同的机械臂调速曲线,分别是下图的Curve-0、Curve-1、Curve-2。三种曲线均为理想速度曲线。
当机器人执行焊接任务时,首先计算机械臂末端到目标距离(焊点)的距离。机械臂启动、停止所运行的最短距离记为L0,最大速度记为V0,则当需要移动的距离L 参考文献: [1]张红霞.国内外工业机器人发展现状与趋势研究[J].电子世界,2013,12:5. [2]高亚军.六自由度机器人平滑轨迹规划与控仿一体化系统研究[D].浙江工业大学,2014.
