一种单幅运动模糊图像的车速测量算法
2018-05-14陈佳库鹏森玉振明
陈佳 库鹏森 玉振明
摘要:针对道路中行驶车辆速度测量的问题.利用运动车辆所产生的单幅运动模糊图像可获取车辆在曝光时间内的运动信息,从中提取其运动参数,进而实现行驶车辆的速度测量。在分析运动模糊成像机理和车速测量模型的基础上,构建道路交通场景实验环境,用ccD相机以多种快门速度对车速在25~130 km/h之间的行驶车辆进行多次抓拍;通过定位单幅模糊图像中车辆轮毂的边界,并计算轮毂运动方向和非运动方向上的直径差来估算车辆的运动参数,完成车速测量实验。实验数据表明:不同曝光时间和不同车速情况下,车速测量的误差绝对值都在8%以内。结果表明该算法对成像环境要求不高,且适用于不同车型。
关键词:道路交通;车辆速度测量;单幅运动模糊图像;运动参数;车辆轮毂;直径差
0引言
随着国民生活水平不断提高,机动车保有量保持较快增长,车辆带给人们方便快捷的同时,也带来不容忽视的安全隐患。在智能交通系统中,交通运输安全是一个重要的组成部分,其中超速驾驶是导致道路交通事故的主要原因之一。因此,对车速测量的研究具有重要意义。现有车速测量有雷达、感应线圈、超声波、红外线检测和视频检测等多种方法,以视频测速为代表的基于计算机视觉的车速测量方法,既具有安装简便和设置灵活等优点,又能用于收集更多道路交通信息,因而得到更多关注。但目前基于计算机视觉的车速测量的研究主要集中在通过视频或图像序列完成车速测量,而基于单幅车辆图像进行车速测量的研究较少。
道路交通中,车辆运动形成的模糊图像包含着车辆在曝光时间内的运动信息,故单幅运动模糊图像也可用于车速测量。文献[9]根据图像的亮度曲线估算运动模糊参数,通过复原确定最优模糊参数,再结合几何模型和相关参数计算出车辆速度。文献[10]分析了局部运动模糊原理进而提出一种车辆测速方法;该方法的局限性表现在当目标与背景的对比度较小时,效果容易弱化,故算法需要人为选定对比度较好的区域。文献[11]指出了文献[9]中车辆测速方法存在的不足,并提出了基于抠图的改进方法。文献[12]基于局部运动模糊与透明度之间的关系,通过抠图获得车辆的透明图,进而估算车辆的运动参数:但在成像条件不佳的情况下,例如阴雨或雾霾天气,采集到的车辆模糊图像无法采用该方法进行车速估算。
针对上述问题,本文提出一种利用单幅运动模糊图像中车辆轮毂所呈现的模糊现象进行车速测量的算法,可适用于成像时光照不够好或车身颜色与背景对比不明显等情况。
1成像机理和车速测量模型
1.1运动模糊成像机理
运动目标引起成像模糊,是由于曝光时间内目标运动导致成像平面上一个像素点对应了多个物点的像。例如,在一幅水平运动模糊长度为10像素的模糊图像中,模糊区域内每个像素均是同一行相邻10个物点成像内容的叠加。这种有规律的模糊就包含了目标的运动信息。
1.2车速测量模型
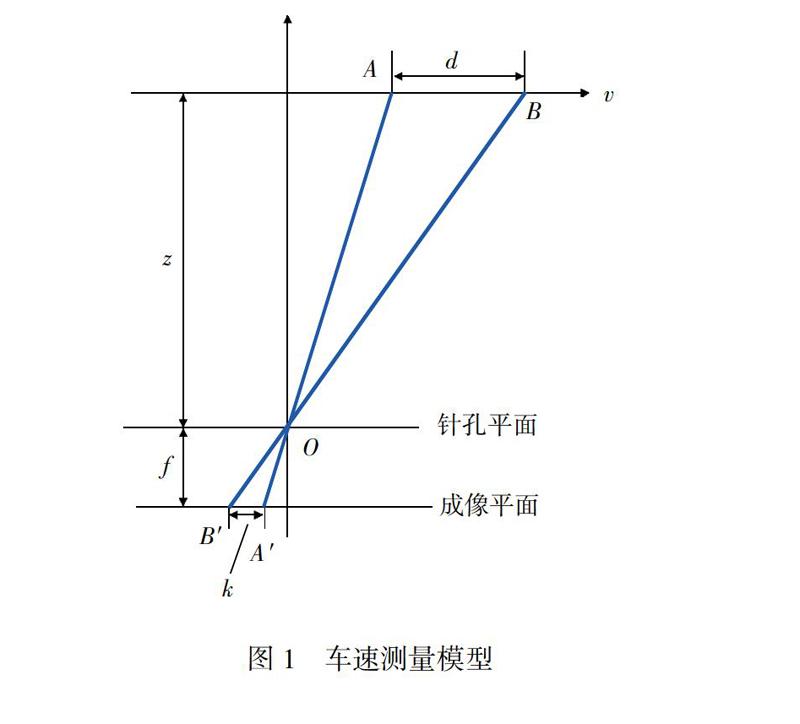
本文针对运动方向所在平面与相机成像平面平行的车辆水平运动进行研究。车速测量模型如图1所示。
在三维空间中,当车辆的运动平面与相机成像平面平行时,车辆在曝光时间T内,以运动速度u从A运动到B,运动距离为d,车辆与镜头距离为z,焦距为f,在像面上由A移动到B,间距为k,对应到图像上的模糊像素个数为N。设像素大小为S,则基于针孔成像原理和物像对应关系,可得:
从式(4)可知,曝光时间T、焦距f和像素大小s都可从采集的图像中直接获得,车辆与镜头距离z也可通过标记获得,因此车速估算的关键就在于如何从模糊图像中获得模糊像素个数N。
2车速估算算法
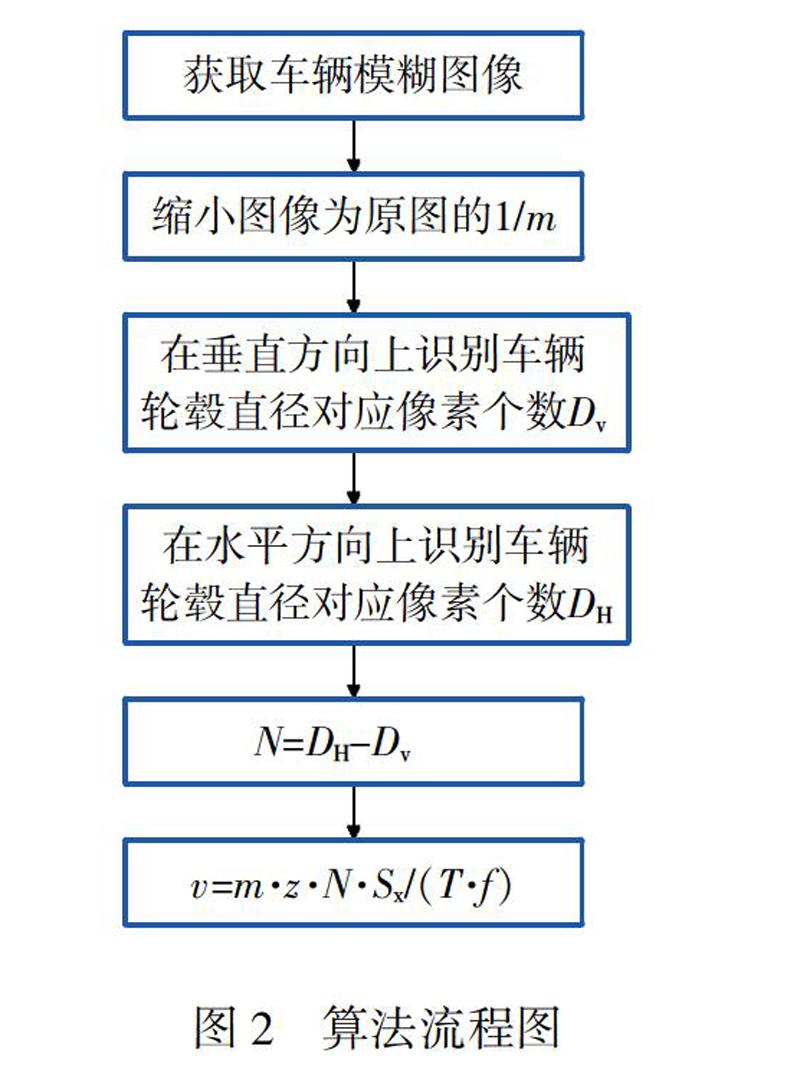
本算法的重点是依据车辆轮毂的运动成像特点,获取车辆运动信息所对应的模糊像素个数Ⅳ,进而结合其他参数估算车速。基于车辆运动平面与相机成像平面平行的前提,轮毂在水平方向上的运动造成图像在水平方向上出现一个拉长的模糊区域,而其在垂直方向上没有位移不会出现模糊。换言之,图像中轮毂在垂直方向上所对应的直径是轮毂的实际直径,而其水平方向上所对应的直径是模糊后的直径,其中包含着车辆运动所对应的模糊尺度。因此,分别获取轮毂垂直方向上的直径和水平方向上模糊区域所对应的直径,二者差值即为运动模糊图像中模糊长度,从而通过式(4)及有关参数估算出车辆在水平方向上的运动速度。车速估算算法流程如图2所示。
本算法中有两点需要注意:1)考虑到实际应用中采集的图像像素可能较低,故先缩小图像为原图的1/m,所以计算出模糊像素后需要再乘以m,才对应原图中实际的模糊像素个数No 2)由于成像条件有限,有时会同时抓拍到前后两个车轮,有时却只能抓拍到一個车轮。如果图像抓拍到两个车轮,需要分别计算前后轮毂的直径差所对应的模糊像素个数,平均后得到模糊像素个数N:如果图像只抓拍到一个车轮,只计算一个轮毂的直径差对应的模糊像素个数就可得到模糊像素个数N。
3实验
本文进行了2组户外实验,通过一辆吉利博瑞汽车在公路上以25~130km/h之间不同车速行驶,在垂直于车辆行驶方向借助三脚架固定相机采集车辆行驶经过指定位置的照片。汽车每次行驶经过该采集地点时,由专人在车中同时记录下该车自带的速度显示屏中的瞬时车速u,作为图像所对应的参考车速。
第1组实验,采用Canon EOS 100D相机,图像分辨率为5 184x3456,像素大小为4.30μmx4.30μm,焦距设置为24 mm,曝光时间设置为1/100 s,云腾VT-888三脚架的工作高度为1.54m,相机镜头与车距离为5 m。第2组实验,采用Nikon D7100相机,图像分辨率为6 000x4 000,像素大小为3.90 μmx3.90 μm,焦距设置为18 mm,曝光时间分别设置为1/100,1/200,1/400s,云腾VT-888三脚架的工作高度为1 m,相机镜头与车距离为3.5 m。
本文选用的处理器为Intel(R)Core(TM)i7-4790CPU3.60GHz,8GB RAM,操作系统为64位Win7的微机,使用软件为MaflabR2014a。
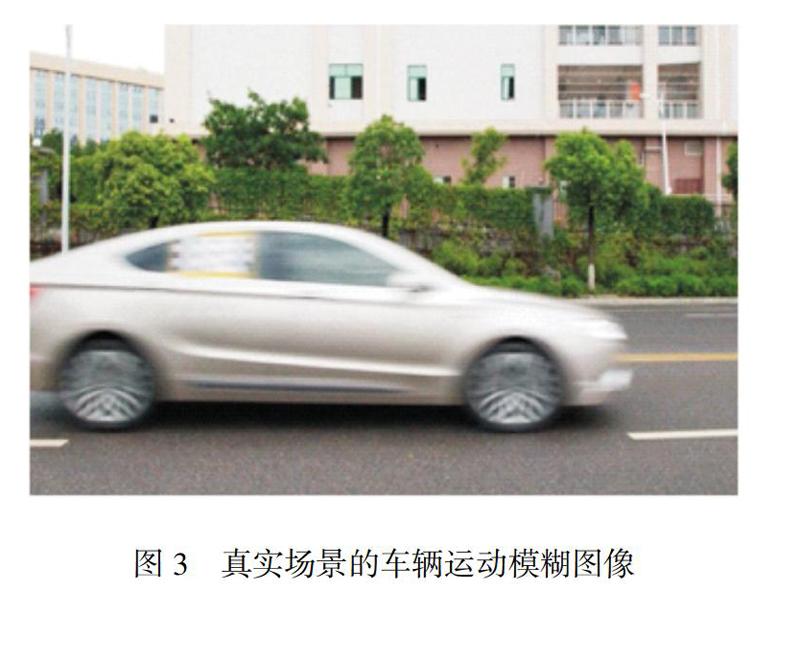
以图3为例进行车速估算。采集图像时记录的参考车速v=16.94m/s,缩小图像为原图的1/8,分别计算前轮毂和后轮毂的模糊像素,再求其平均值。
图4中车辆前轮毂的直径对应像素个数为:D=64,D=91,则前轮毂的模糊像素个数为Nr=91-64=27。图5中车辆后轮毂的直径对应像素个数为:实验结果汇总如表1所示。
实验数据表明,采用本算法进行车速测量,误差绝对值均在8%以内,与文献中实验结果8%的误差相当,但本算法具有成像条件要求较低的优势。另外,结合《道路交通安全违法行为记分分值》的规定和交管部门实际执法情况,一般都是对超过规定时速10%车辆进行处罚。所以从实际应用的角度来看,本算法的误差是可以接受的。
4结束语
本算法克服了对成像条件的高要求,能够较准确地估算道路上行驶车辆的速度,改进之处体现在以下3点:1)对成像条件要求降低,光照条件不理想或者车身颜色和背景对比不明显,都能采集到可用的轮毂图像进行车速估算。2)适用于不同车型,本算法是借助轮毂在图像中非运动方向和运动方向的成像差异进行车速估算,计算过程不需要用到车辆本身的参数,故可用于不同车型的车速测量。3)采集图像容易实现,由于本算法利用车辆轮毂的模糊图像来估算运动参数,所以不需要抓拍到完整的车身,只要对准轮毂部分抓拍即可。但经过分析发现,本算法在车速估算中可能会从以下两个方面引入误差:1)模糊像素取值存在一定误差,计算过程中没有使用原图而是将其缩小一定倍数后估算模糊像素,且手动标记轮毂边缘位置也存在一定的人工误差。2)相机与车辆轮毂之间距离z不够精确,虽然在道路地面做了标识,但无法保证车辆每次都能经过该标识位置。下一步将研究如何实现从模糊图像中自动获取模糊尺度,以及更准确地获取相机与车辆轮毂之间的距离。
