基于自适应分级滑模控制的球形器人定位控制
2018-05-14于涛孙汉旭赵伟杨昆
于涛 孙汉旭 赵伟 杨昆


摘要:探讨一种三驱动球形机器人的定位控制问题,提出基于控制增益自适应调节的分级滑模控制方法。相比于现有定位控制方法,所提出的控制方法对于系统不确定性具有很强的鲁棒性。将球形机器人系统分解为球体子系统和偏心质块子系统,并在此基础上分别设计系统的各级滑动面。基于Lyapunov函数法选取分级滑模控制律和控制增益自适应律,并采用边界层法削弱分级滑模控制器的抖振。应用Barbalat引理证明闭环系统的稳定性,并利用数值仿真实验验证所提控制方法的可行性和有效性。数值仿真结果表明,该控制方法能够实现带有不确定性的球形机器人系统的定位控制。
关键词:三驱動;球形机器人;定位控制;自适应分级滑模控制
文献标志码:A 文章编号:1674-5124(2018)05-0097-06
0引言
球形机器人是一种利用球形外壳滚动来实现自身运动的新型移动机器人,具有运动全向性和转向灵活等优点。球形机器人将机械结构和控制电路都封装在球壳内部,全封闭的外壳使其对复杂物理环境具有很强的适应能力,可应用于国防装备、环境监测和行星探测等诸多领域。目前,球形机器人研究中所存在的共同理论和技术难点是其运动控制问题。因此,深入探索球形机器人的运动控制方法具有重要的理论和实际应用价值。
纵向运动是球形机器人的主要运动形式之一,纵向运动控制的有效性直接影响球形机器人的实际运动性能。目前,球形机器人纵向运动的定位控制方法主要有:学习控制、PID控制、滑模控制和反馈线性化控制。在实际的控制中,球形机器人不可避免地会受到参数不确定性等因素的影响:因此,在设计控制器时必须对这些因素加以考虑。但遗憾的是,现有定位控制方法均未充分考虑这些不确定因素的影响,因此无法确保闭环控制系统的鲁棒稳定性。
球形机器人是一种典型的欠驱动系统,分级滑模控制是适用于此类欠驱动系统的有效方法。但对于不确定欠驱动系统而言,为保证系统稳定,必须依据不确定性上界值来选取控制器的控制增益:然而不确定性上界值通常难以直接获得,这就使得控制增益的选择变得十分困难。
针对现有定位控制方法和分级滑模控制方法存在的诸多不足,本文在分析一种三驱动球形机器人运动特性的基础上,提出一种基于自适应分级滑模控制的定位控制方法。所提控制方法通过自适应机制动态调节控制器的控制增益,对于系统不确定性具有良好的鲁棒性。从理论上分析了系统各级滑动面的渐近稳定性,并通过仿真实验验证了所提控制方法的有效性。
1球形机器人纵向运动的数学模型
BYQ-XII型球形机器人主要由球壳、主梁、偏心质块和伺服电机等部分构成,其机械结构如图1所示。球壳内表面赤道处的轨道上设有环形齿条,转向支座通过与齿条啮合的转向轮与轨道相连。轨道电机驱动主梁和偏心质块相对球壳转动,从而实现机器人的转向控制。主梁一端与转向支座相连,另一端与导向支座相连。长轴电机带动主梁相对球壳转动,使机器人重心向前或向后移动,从而驱动机器人进行纵向运动。短轴电机驱动偏心质块相对主梁转动,使机器人重心向左或向右偏移,从而控制机器人向左或向右转向。由此可见,当长轴电机分别与短轴电机或轨道电机配合使用时,机器人系统可以实现两种不同的双驱动模式。在这两种不同的驱动模式下,该球形机器人均能在地面上全向滚动。
为便于对该机器人的运动特性进行分析,首先对该机器人做出如下4点假设:
假设1:将球壳视为均质对称的薄壁球壳,球壳的质量为m1,球壳的半径为l2。
假设2:主梁的质心与球心重合,主梁的质量为m2,主梁相对长轴电机输出轴轴线的转动惯量为I1。
假设3:将偏心质块视为偏心质点,偏心质块通过长度为l2的无质量摆杆与主梁铰接于球心处,偏心质块的质量为m3。
假设4:球形机器人在地面上运动时,球壳仅进行无滑动的纯滚动。
然后计算系统的拉格朗日函数L=K-P,并应用拉格朗日一欧拉方程来推导球形机器人纵向运动的动力学模型,其中K和P分别表示系统的动能和势能。
分别对球壳、主梁和偏心质块的动能进行计算,进而可得系统的动能为
选取地面作为系统的零势能面,可得系统的势能为
忽略机器人系统内部的摩擦力,将拉格朗日函数L=K-P代入拉格朗日一欧拉方程,可得球形机器人纵向运动的动力学模型为
2定位控制器设计
对于式(5)所示的球形机器人系统,将整个系统分解为球体子系统A和偏心质块子系统B:
在动力学模型式(4)中令所有的速度和加速度为零,从而可知当机器人站定在地面上时,系统的平衡摆角应为零。由此分析结果可见,球形机器人定位控制的目标包含了滚动球壳的位置控制和偏心质块摆起角度的稳定控制两个子目标。
对球体子系统A,设计第一级滑动面s1为
由式(11)可得,第一级滑动面s2的等效控制为
由于整个系统只有一个输入变量,需要进一步将2个第一级滑动面联系起来。为此,定义系统的第二级滑动面为
与文献相比,本文方法在边界层内外采用了相同的控制增益调节机制,因而避免了系统状态穿越边界层时由于控制增益切换而引起的控制输入突变的问题。23稳定性证明
定理1:对于式(5)所示的机器人系统,分别按式(8)、式(9)和式(14)构造系统的各级滑动面,如果采用式(21)所示的分级滑模控制律和式(19)所示的控制增益自适应律,那么系统的第二级滑动面S是渐近稳定的。
定理2:对于式(5)所示的机器人系统,分别按式(8)、式(9)和式(14)构造系统的各级滑动面,如果采用式(21)所示的分级滑模控制律和式(19)所示的控制增益自适应律,那么系统的第一级滑动面s。和s2是渐近稳定的。
4仿真研究
4.1机器人参数
为验证本文提出的定位控制方法的有效性,利用Matlab/Simtdink仿真环境进行数值仿真实验。仿真实验分两个部分来进行,分别用于验证本文提出的控制方法的控制性能和对于系统不确定性的鲁棒性。BYQ-XII型球形机器人各物理参数的标称值分别为
4.2控制性能验证
本文方法的仿真结果如图3~图5所示。图3为球心位置和偏心质块摆起角度的变化曲线。由图可以看出,在本文控制器作用下,机器人在约7.7 s就能无超调地运动至指定位置,机器人的纵向滚动具有明显的加速过程和减速过程。在加速过程的第1个阶段,偏心质块首先由竖直方向摆至正向最大摆角位置,这一阶段机器人的加速度逐渐增大。在加速过程的第2个阶段,偏心质块由正向最大摆角位置摆回至竖直方向,这一阶段机器人的加速度逐渐减小至0。机器人的减速过程也包括两个阶段,偏心质块首先由竖直方向摆至反向最大摆角位置,然后再由反向最大摆角位置摆回至竖直方向。机器人系统最终实现偏心质块摆起角度稳定控制的时间约为8.1 s,机器人滚动过程中偏心质块的最大摆起幅度约为26.6°。图4为系统各级滑动面的变化曲线,可以看出各级滑动面均能快速地收敛至零。图5为控制器输出的变化曲线,可以看出控制信号较为平滑且无抖振。
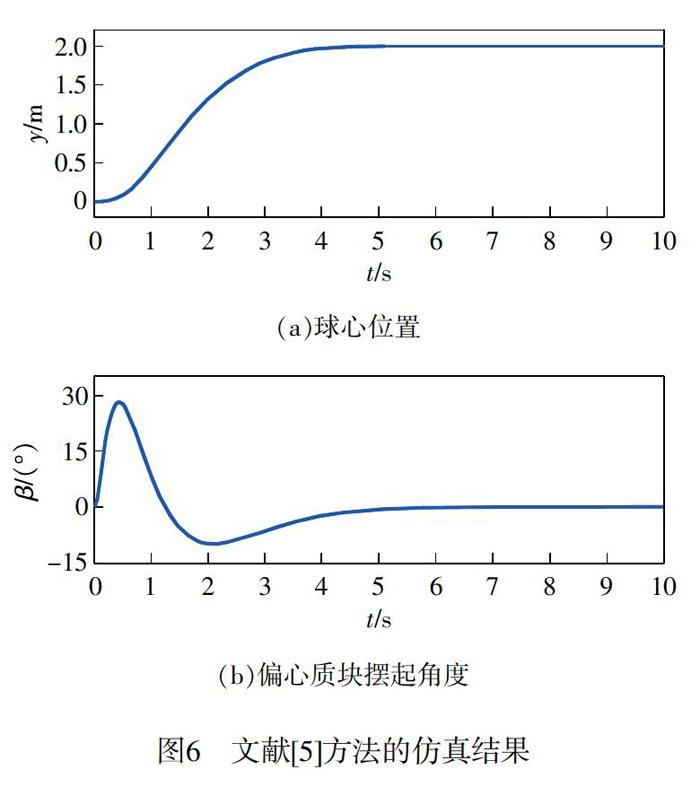
文献方法的仿真结果如图6所示,由图可以看出在文献控制器作用下,机器人运动至给定位置的时间约为8.2 s,实现偏心质块摆起角度稳定控制的时间约为8.5 s,機器人滚动过程中偏心质块的最大摆起幅度约为28.1°。对比本文方法和文献方法可知,本文方法较为有效地减小了系统的调节时间和偏心质块摆起角度的超调量。
4.3鲁棒性验证
为测试本文方法对于系统不确定性的鲁棒性,假设系统模型带有15%的参数不确定性。鲁棒性验证实验中,选取系统模型各参数值为4.1中机器人各参数标称值的1.15倍。需要说明的是,本文所提方法仍然采用标称模型来选取控制律。同时为便于分析,将控制性能验证结果与鲁棒性验证结果进行对比。
图7为本文方法的鲁棒性验证结果。由图可以看出,被控系统的动态性能在一定程度上受到了系统中存在的参数不确定性的影响,球心位置上产生了很小幅度的超调,同时系统的调节时间也稍有增加。尽管如此,在本文所提控制器作用下,机器人系统仍然能够被镇定至期望的平衡点,球心位置和偏心质块摆起角度均能够收敛至各自的目标值。由鲁棒性验证结果可见,本文方法对于系统不确定性具有很强的鲁棒性。
5结束语
本文研究了一种三驱动球形移动机器人的定位控制问题,提出了一种自适应分级滑模控制器的设计方法。所设计的控制律中包含了由自适应律调节的变控制增益,可使系统状态转入滑动模态运动。该控制方法无需已知机器人系统不确定性的上界值,较好地解决了传统方法中控制增益选取困难的问题,并可有效地实现带有系统不确定性的球形机器人的定位控制。通过与现有控制方法的对比验证了本文所提方法的控制性能,并采用带有15%参数不确定性的机器人模型验证了本文所提方法的鲁棒性。在后续研究中,将进一步考虑在球壳与偏心质块间存在阻尼情况下的球形机器人定位控制问题。
(编辑:莫婕)