雾天高速公路辅助驾驶系统的设计与实现
2018-05-14陈鹏闵永军程志国朱庆华潘义勇
陈鹏 闵永军 程志国 朱庆华 潘义勇
摘 要:针对目前国内雾天高速公路管理措施过于简化、消极的问题,设计一种以自编队行驶方案为基础,以多信道通信技术为核心的嵌入式移动无线节点系统。该系统以STM32F103为主控芯片,将由GPS报文解析得到的本车位置和速度等信息通过SI4463射频模块传送给相邻车辆,以提高驾驶员对周围车辆运行状态和位置的感知能力。实验表明,该系统运行稳定,数据收发准确,能够提高雾天高速公路的安全性能和通行能力,达到交通管理部门“少封路、少降速”的要求。
关键词:雾天;高速公路;自编队行驶方案;多信道通信;辅助驾驶系统
中图分类号:U495文献标识码:A文章编号:1006-8023(2018)06-0055-07
Design and Implementation of an Assisted Driving System for Foggy Expressway
CHEN Peng,MIN Yongjun*,CHENG Zhiguo,ZHU Qinghua,PAN Yiyong
(College of Automobile and Traffic Engineering, Nanjing Forestry University, Nanjing 210037)
Abstract: Regarding the problem of oversimplified and negative management measures of china,s freeway in fog, an embedded mobile node system based on the self-teaming driving programs and multi-channel communication technology is designed, which is wireless. With STM32F103 as the main control chip, the system transmits the information such as the position and speed of the vehicle, which is analyzed by the GPS message, to the adjacent vehicles through the SI4463 RF module, so as to enhance the driver,s ability to sense the running status and position of the surrounding vehicles. The test results show that the system has been stable in operation, sent and received data accurately, and can not only improve the safety performance and traffic capacity of the freeway under the foggy weather, but also meet the requirements of the traffic management department for
''less sealing and less speed reduction''.
Keywords: Foggy weather; freeway; self-teaming driving program; multi-channel communication; assisted driving system
0 引言
霧天环境下的安全行车问题已经成为制约高速公路带来经济效益的瓶颈[1-3]。目前对于浓雾天气,管理部门主要采取封闭高速公路的措施来保障安全,但实际上只是将事故转移到了其它道路[4]。因此,开发一种能够引导驾驶员在高速公路雾天环境下安全行驶的辅助驾驶系统具有重要的意义。
随着传感器技术的发展,超声波、红外线、激光、毫米波雷达和机器视觉等技术开始用于探测车辆周围的行驶环境,并给驾驶员提供相应的预警信息,但由于技术自身的限制,很难在雾天环境下获得良好的效果[5-6]。
智能交通系统(ITS)为解决雾天高速公路安全行车的问题提供了新的技术手段。卜祥元等[7]提出利用无线射频天线周期性的收发GPS模块获取的位置信息,以信息交互的方式推算与邻车的位置关系从而提高雾天驾驶员对周围车辆的感知能力。邢刚等[8]利用通用分组无线服务技术(GPRS)将GPS接收的位置信息在车辆间相互转发,并通过设置无线数据中状态位来辨别行驶方向。文献[7-8]采用车车通信(V2V)的相关技术能够避免障碍物和反向行驶车辆的干扰,但由于现在通用GPS定位精度达不到车道级定位要求[9],同向相邻车道车辆与本车不在同一个车道,对本身并无威胁,系统却因无法判别两车所行车道,预警距离内就会产生误报,导致不能充分地利用高速公路资源。
本文主要针对上述不能区分同向车道的问题,参考交通学跟驰理论,制定自编队行驶方案,并基于多信道通信技术开发了一套辅助驾驶系统。系统按车道划分不同的无线通信中心频率,同车道各车队采用中心频率附近的不同信道进行车队内部通信,可避免由于定位精度不足产生不能区分同向车道的现象,保证车辆在雾天高速公路环境下安全高效的行驶。通过相关试验测试表明,系统基本能达到预期的目标。
1 系统的总体方案
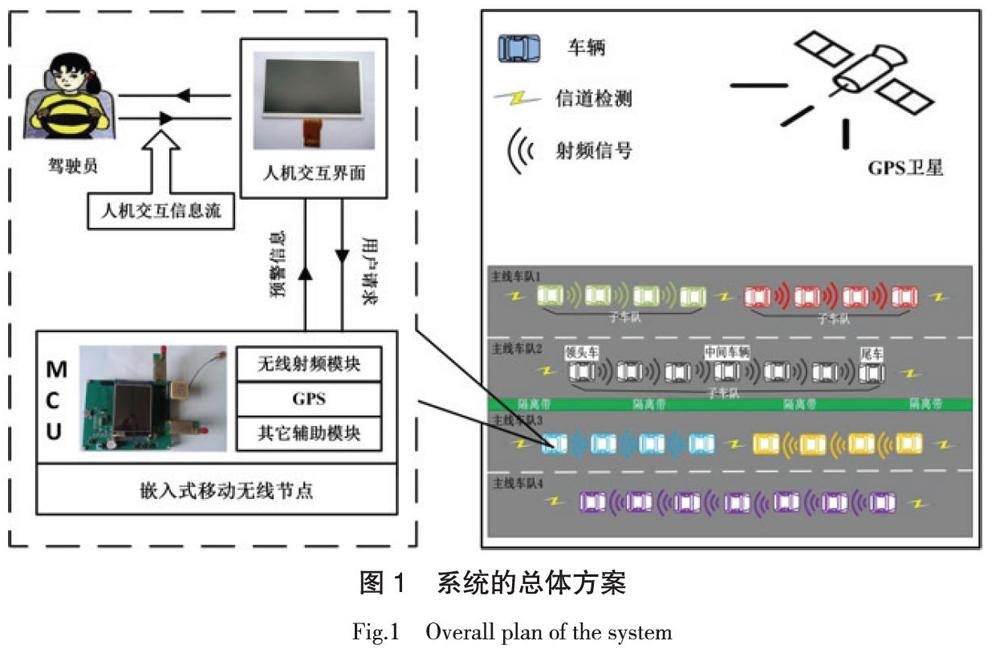
自编队行驶方案要求进入高速公路的车辆以编队行驶的方式通过雾区。每个车道上行驶的若干个由领头车、中间车辆和尾车组成的子车队统称为主线车队。主线车队之间采用不同的中心频率通信,其内部各子车队采用该中心频率附近的信道通信,确保每个子车队拥有独立的通信信道[10]。
系统的总体方案如图1所示,车辆在进入高速公路前,由交通管理部门人员进行编队并发放驾驶辅助系统,告知驾驶员开启系统并按提示信息输入起始信息。起始信息包括通信信道的频率值和车辆所处车队内位置等信息,即领头车、中间车辆或者尾车的位置信息。信息设定结束后,由领头车的系统直接向其它车辆发送位置请求信息,其它车辆的系统采用载波监听多路访问/冲突避免(CSMA/CA) 的方式向领头车的系统发送自车的位置信息[11]。随后领头车的系统按距离的远近向子车队内其它车辆的系统分配逐渐增大的独立的ID号和通信时隙[12]。最后系统在完成按通信时隙与后方车辆的系统握手通信(RTS/CTS信号)后才开始真正的数据传递[13]。上述操作完成后,子车队方可驶入高速公路。
子车队在行驶过程中,车辆不断的接收并解析GPS报文,并在自车的通信时隙内将最新的行驶信息发送给后方的车辆;在自车通信时隙的上一个时隙,接收来自前车的行驶信息。领头车和尾车由于处在特殊的位置,会在空闲的时隙内开启信道检測功能,与其它车队的领头车和尾车建立起通信[14]。车载系统在获得前方车辆行驶信息的情况下,结合自车的行驶信息进行计算,并给驾驶员发出行车提示或警告,控制前后两车保持安全的车距,以保证雾天高速公路环境下的行车安全。
本嵌入式移动无线节点系统主要由主控模块、无线射频模块、GPS模块、人机交互模块和报警模块等组成。主控模块通过UART接口与GPS模块通信,通过I/O口和SPI接口与其它模块通信,在主控模块的管理下,无线射频模块负责在车辆间建立起通信联系、完成独立ID号的分配和行驶信息的共享,GPS模块负责为系统提供时间、位置和速度信息,人机交互模块接收驾驶员提供的起始信息,并通过报警模块发出提示或警告信息引导驾驶员安全行驶。
2 系统的硬件设计
2.1 ARM MCU的选择
本文主控模块选用的MCU是意法半导体(ST)公司基于Cortex-M3内核生产的STM32F103ZET6芯片,其采用ARM Cortex-M3内核用于要求功耗低、性能高、成本低的场合。STM32F103ZET6内部集成了丰富的片上资源,简化了硬件电路,提高了系统的抗干扰能量,因此处理的数据更加稳定和精确[15]。
2.2 SI4463射频模块电路的设计
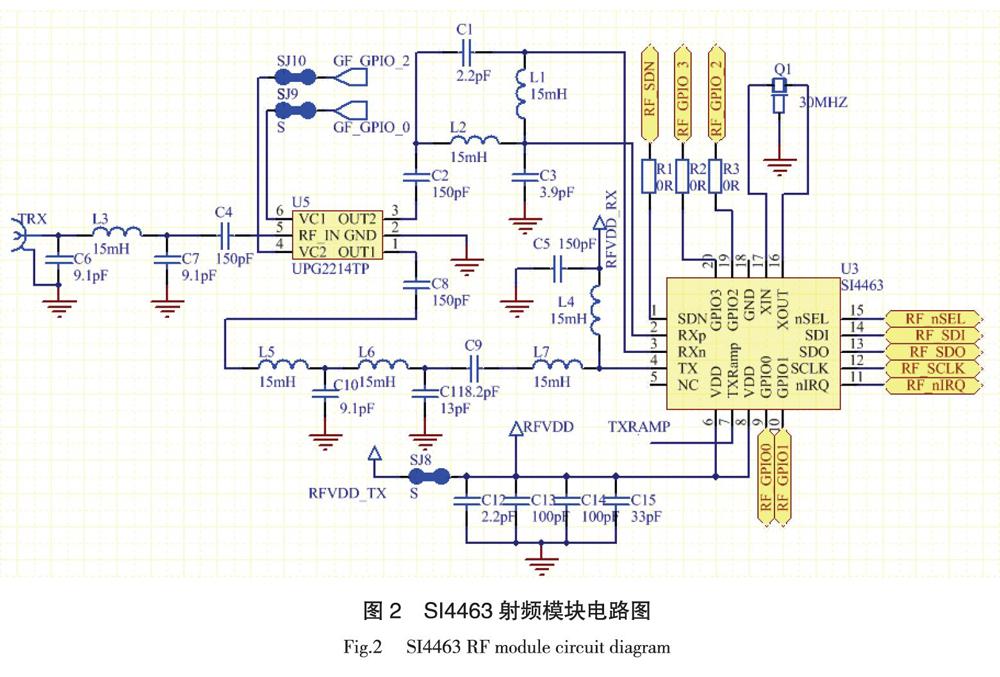
SI4463是一款具有发送器、接收器和收发器的高度集成单片无线ISM芯片。通信距离可达2 500 m,可提供433、868、915 MHz 3个中心频率各50个信道的大范围频率信号,同时兼容空闲信道评估与检测(CCA)和自动频率控制(AFC)等功能,相邻信道射频互调抗拒比可达60 dB,能够满足自编队通信的需求,其中无线射频模块电路图如图2所示。
SI4463芯片的GPIO0 ~ 3引脚与MCU的SPI接口相连,用以接收主芯片的控制指令。其中,SCLK、SDI引脚分别为串行时钟和数据输入,SDO是数字输出引脚,NSEL引脚为系统提供选择、使能功能,NIRQ是中断输出引脚。RX和TX引脚分别为信号的输入和输出端,左上角UPG2214TP芯片作为Si4463芯片的专用天线使用。
为保证无线信号收发的稳定性,电路图下方电容C12、C13、C14和C15与电源并联,滤除杂波脉冲提供稳定的电压输入。左边专用天线收发端以电容C6 、C7、C4和电感L3组成低通滤波电路,避免低频信号的干扰。上方C1、L1、L2等为输入阻抗匹配电路,左下方C10、L5、L6等为输出阻抗匹配电路。
2.3 GPS模块的选择
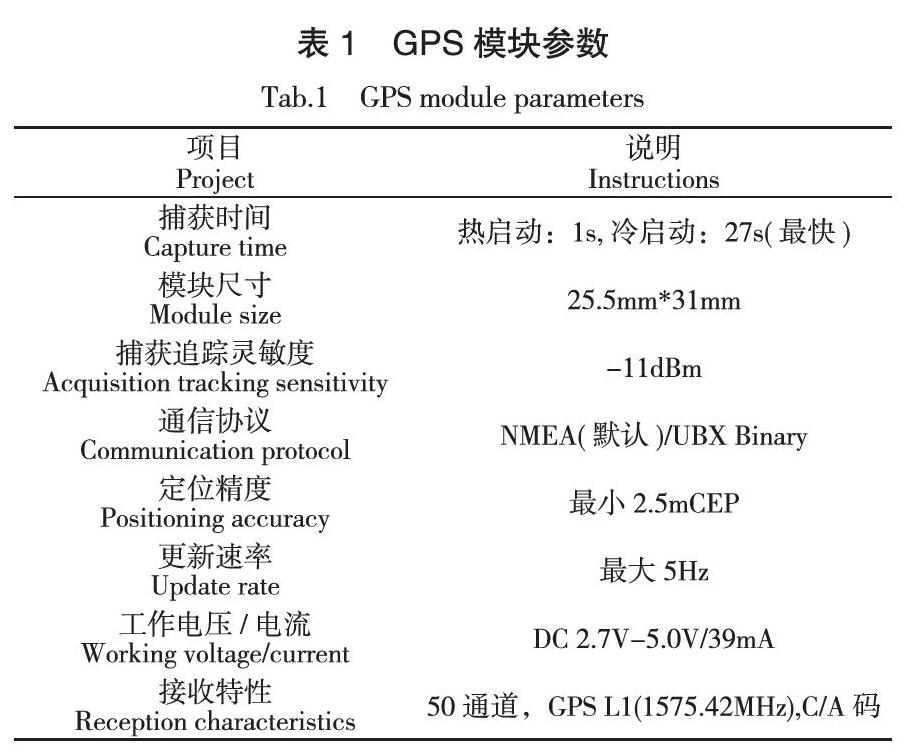
系统要求GPS模块拥有足够的刷新速率,以便及时更新车辆的行驶信息。基于上述考虑,本文选用瑞士U-blox公司以U-BLOX NEO-6M芯片为基础开发的ATK-NEO-6M高性能GPS定位模块,该模块自带MAXIM 20.5dB高增益LNA芯片和陶瓷天线,信号稳定且搜星能力强。该模块各参数见表1。
ATK-NEO-6M GPS模块兼容5V/3.3V单片机系统,与本系统MCU的通信通过UART(串口)来实现,输出的定位数据采用NMEA-0183协议,控制协议为UBX协议,5Hz的刷新速率足以满足通信的需求。
3 系统的软件设计
本系统采用C语言在Keil软件平台上完成软件设计的部分编译和调试,包含主程序设计、SI4463无线射频模块初始化、GPS报文接收模块初始化、按键扫描程序设计和行车预警模块程序设计等,下面主要介绍主程序MCU、SI4463无线射频模块和行车预警模块,其它仅作简要说明。
3.1 主程序MCU软件设计
系统复位后主程序首先完成程序的初始化:初始化STM32,配置SPI、SI4463以及GPS配置的初始化。接着按键扫描模块检测驾驶员输入的起始信息,并由领头车分配独立的ID号和通信时隙,执行握手通信。当握手通信成功后,主程序开始循环执行行车预警模块的程序,具体的流程如图3所示。
3.2 SI4463无线射频模块软件设计
系统无线通信模块初始化函数为:
void SI4463_Init(void)
{ SI4463_IOSET(void);
SI446X_RESET(void);
SI446X_CONFIG_INIT(void);}
其中void SI4463_IOSET(void)是SI4463模块的IO口(不包括SPI口)配置,具体配置SI4463芯片的不同功能。void SI446X_RESET(void)为无线传输模块复位子程序。SI446X_CONFIG_INIT(void)为硬件的配置,包括传输数据包配置和参数配置,具体设置发射功率为+20 dBm,调制方式是FSK,传输方式为FIFO模式,有效数据包的载荷为64个字节等。
3.3 行車预警模块软件设计
图4为预警模块的工作流程是主程序的一个环节。系统先调取自车与前车最新的行驶信息并进行判断,当实际车距与理论车距偏差较大时,会提示驾驶人员执行加速或减速操作,以避免发生车辆碰撞或掉队的现象。
考虑到高速公路雾天行车环境的复杂性,本文以最小安全距离作为理论的行车间距。从驾驶员意识到前方发生突发状况,到经过一定的反应时间开始制动直到车辆停止并正好不与前方车辆产生碰撞的距离为最小安全距离[16]。图5是同车道行驶车辆不发生碰撞时的安全距离示意图,本系统为了确保行车的安全性,只考虑Vb0≥Va0和Sa = 0这两种极端情况。
经运动学分析和综合考虑实际行驶工况[17],车辆B要避免追尾车辆A,需要满足以下条件:
式中:L为B车制动开始时A、B两车的实际距离,单位为m;Sb1为在驾驶员反应阶段(tr1)、制动器协调阶段(tr2)和减速度增长时间(ti)车辆B行驶的距离,Sb2为持续制动阶段车辆B行驶的距离;tr = tr1+ tr2,取tr = 1.5 s,ti = 0.1 ~ 0.2 s;同时考虑到雾天环境下道路附着系数降低,可取最大制动减速度amax = 5 m/s2。另外,考虑到GPS的精度误差、刷新的速率和车身长度等因素,取纵向预留间隙Dsafe为30 m。
由公式(3)可知,B车行驶的距离主要取决于B车采取制动时的初速度,系统通过GPS模块测得自车的速度并进行理论距离的计算,从而实现速度预警的控制策略。
4 系统性能测试及数据分析
为了验证本辅助系统的可行性,同时考虑到雾天环境对GPS报文和无线数据的收发并无任何的影响,所以选择某段流量稀少的双车道道路进行实车实验,如图6所示。GPS接收设备和辅助驾驶系统安放在车内,GPS接收天线放置在车顶。
经测试,系统能够正常的运行,不同信道移动无线节点之间无明显干扰,同信道移动无线节点在车辆组队行驶中能维持良好的通信,响应时间在0.27 s内,可满足车辆间信息通信的需求。GPS信号稳定,经纬度、速度和时间等数据均能准确接收和存储。其中同频通信的实验数据和分析见表2。
通信测试表明:当测试采用相同的通信距离时,高频通信的丢包率和误包率通常要高于低频通信,而且在通信距离增加时,进行高频通信的丢包和误包概率也随之增加。尽管在200 m的测试距离内丢包和误包的概率在容错范围内,但为了保证系统足够的安全,无线射频模块在使用不同频率进行通信时应尽量避免采用高频进行通信。
5 结束语
本文以自编队行驶方案为基础,结合多信道通信技术设计并实现了一个高速公路雾天行车辅助驾驶系统,该系统能够很好的解决雾天高速公路环境下由于GPS定位精度不足产生的误报问题,同时也为智能网联汽车和环境感知技术等方面的研究提供了参考。
虽然系统已实现了基本功能,还具有良好的稳定性,但在细节方面尚有改进的余地。尤其是在理论车距的计算方面,只是着重的从安全性能的方面做出考虑,未来将进一步结合高速公路的通行效率进行研究。
【参 考 文 献】
[1]张金满,谭桂容,武辉芹,等. 灾害性天气交通事故特征及雾天公路通行预警指标体系[J]. 干旱气象,2016,34(2):370-375.
ZHANG J M, TAN G R, WU H Q, et al. Characteristics of severe weather traffic accidents and traffic warning system of fog and sky highway[J]. Arid Meteorology, 2016, 34(2): 370-375.
[2]李晓梦,闫学东,赵佳,等. 雾天对弯道驾驶行为的影响研究 [J]. 交通信息与安全,2014,32(5):120-125.
LI X M, YAN X D, ZHAO J, et al. Study on the influence of foggy weather on curved driving behavior[J]. Traffic Information and Security, 2014, 32(5):120-125.
[3] 侯伟明,张磊. 雾天区域公路网通行安全性预警方法研究 [J]. 公路工程,2015,40(4):210-214.
HOU W M, ZHANG L. Research on the early warning method of highway network safety in foggy area[J]. Road Construction, 2015, 40(4): 210-214.
[4]程志国. 雾天高速辅助驾驶装置研究与开发[D].南京:南京林业大学,2016.
CHENG Z G. Research and development of foggy high speed assisted driving device[D]. Nanjing: Nanjing Forestry University, 2016.
[5]初秀民,万剑,严新平,等. 基于车载机器视觉的汽车安全技术[J].中国安全科学学报,2008,18(5):154-161.
CHU X M, WAN J, YAN X P, et al. Vehicle safety technology based on vehicle vision[J]. Chinese Journal of Safety Science, 2008, 18(5): 154-161.
[6]高宏偉,王辉,刘玉影,等. 基于图像测距的汽车防撞系统关键技术研究[J].电子测量与仪器学报,2017,31(6),820-826.
GAO H W, WANG H, LIU Y Y, et al. Research on key techniques of car collision avoidance system based on image ranging[J]. Journal of Electronic Measurement and Instrument, 2017, 31(6): 820-826.
[7]卜祥元,卢继华,张军,等.基于GPS广播方式的高速公路汽车防撞系统[P].中国:CN201110392370,2012-12-01.
BO X Y, LU J H, ZHANG J, et al. GPS car-based anti-collision system for freeway cars[P]. China Patent: CN201110392370, 2012.
[8] 邢刚,王永瑞,黄学战,等.高速公路安全行车系统[P].中国:CN102194330A.发布日期:2011-09-21.
XING G, WANG Y R, HUANG X Z, et al. Highway safety system[P]. China Patent: CN102194330A, 2011.
[9]曹立波,陈峥,颜凌波,等. 基于RFID、视觉和UWB的车辆定位系统[J].汽车工程,2017,39(2):225-231.
CAO L B, CHEN Z, YAN L B, et al. RFID, vision and UWB based vehicle positioning system[J]. Automotive Engineering, 2017, 39(2): 225-231.
[10]刘文彬,杨波,李香宝,等.无线传感器网络中基于物理干涉模型的最小通信信道分配算法[J].计算机应用研究,2014,31(6):1771-1774.
LIU W B, YANG B, LI X B, et al. Minimum communication channel allocation algorithm based on physical interference model in wireless sensor networks[J]. Application Research of Computers, 2014, 31(6):1771-1774.
[11] 崔佳琪,杨剑锋,徐俊,等. CSMA/CA在CSMA/TDMA混合网络中的性能分析[J].计算机工程与应用,2017,53(20):83-88,127.
CUI J Q, YANG J F, XU J, et al. Performance analysis of CSMA/CA in CSMA/TDMA hybrid network[J]. Computer Engineering and Applications, 2017, 53(20):83-88,127.
[12] 李安涛,李建东. 时隙CSMA多跳分组无线移动通信网的迟延性能分析[J].通信学报,1991,12(1):78-82.
LI A T, LI J D. Delay performance analysis of multi-hop packet wireless mobile communication network based on time slot CSMA[J]. Journal of Communications, 1991, 12(1):78-82.
[13] MOHAND Y, DJAMIL A, LOUIZA B M, et al. Modeling and enhancement of the IEEE 802.11 RTS/CTS scheme in an error-prone channel[J]. Formal Aspects of Computing, 2015, 27(1):33-52.
[14] 秦臻,周剑刚,薛峰,等. 最小信道检测开销的协作频谱感知算法[J].西安电子科技大学学报,2015,42(2):206-212.
QIN Z, ZHOU J G, XU F, et al. Cooperative spectrum sensing algorithm with minimum channel detection overhead[J]. Journal of Xian University, 2015, 42(2): 206-212.
[15] 陆万田,王崴,徐晓东,等. 基于STM32的无线光电传感器设计[J].传感器与微系统,2014,33(9):74-80.
LU W T, WANG W, XU X D, et al. Design of wireless photoelectric sensor based on STM32[J]. Sensors and Microsystems, 2014, 33(9):74-80.
[16]MILANES V, PEREZ J, GODOY J, et al. A fuzzy aid rear-end collision warning/avoidance system[J]. Expert System with Applications, 2012, 39(10): 9097-9107.
[17]JAMES R W, GABRIEL A, STEWART W, et al. Extending time to collision for probabilistic reasoning in general traffic scenarios[J]. Transportation Research Part C Emerging Technologies, 2015, 51:66-82.
