基于GNSS差分定位技术的车身三维模型定位算法
2018-05-14张锐
张 锐
(山西省自动化研究所,山西 太原 030012)
0 引言
GNSS系统是由多个系统组合而成的多种模式、多种层面的系统。按定位的方式,GPS定位分为单点定位和相对定位[2](差分定位)。单点定位就是伪距观测量来计算全局坐标的方法。民用领域的GPS精度一般在3 m~20 m,可满足车辆定位导航的需求[3]。相对定位是根据多个GNSS接收机的数据来计算每个测量点相对位置的方法。大地测量以及工程测量都可以采用相对定位[4],按照差分数据类型,可以分为伪距差分定位和相位差分定位,伪距差分定位精度在10 cm左右,而载波相位差分定位精度可达到1 cm。该种设计方案最大的优势就是定位精度高,能够达到厘米级[5]的定位。
1 车辆压线检测算法
当今驾驶人考试系统基本都为基于GNSS差分定位的高精度智能车载驾考评判系统。该系统车载部分一般采用“载波相位差分定位技术”来进行压线检测,靠边停车的边距计算以及车辆航向评判[1]。该种系统采用GNSS差分定位解算车辆各个参考点在考场内的相对位置,评判软件进行综合判断。
通常我们所用车辆压线检测是基于GNSS差分定位的智能驾考系统中的关键算法。测绘考试场地全貌并绘制场地GIS电子地图。电子地图主要的信息为科目二与科目三中的每个项目的区域坐标和区域编号。经过车载GNSS定位系统采集分析得出车辆定位和定向数据,并且能够读取车辆俯仰、翻滚等姿态数据,然后利用向量算法Pc=P+K*M推算出车身每个点的坐标。最后将车身32个点坐标放在GIS地图中搜索匹配,判断是否在项目区域中,就能够自动地识别车辆与道路边缘线等参照物的距离,可以判定车轮是否压线、车身是否出线。图1所示为考车倒车入库压线示意图,比较直观地显示了考试车在倒车入库项目中的位置和压线的情况。
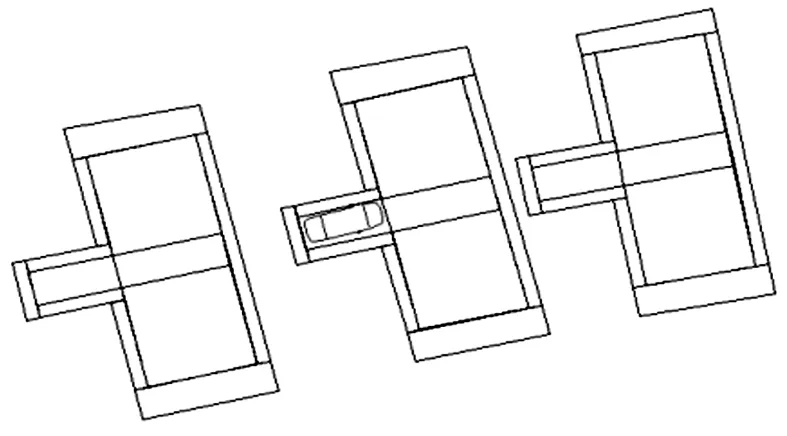
图1 考车倒车入库压线示意图
2 车身三维模型定位算法
GNSS差分定位基准站和移动站共同构建成为了GPS差分定位系统。在驾校的场地范围里搭建固定的GNSS差分定位基准站,通过电台、无线通讯网络等数据传输方式主动发送差分改正信号,移动站即车载GNSS移动接收机实时进行动态接收差分信号数据包,然后进行解算出待测点的坐标值[6]。使用基于GNSS技术的高精度测量RTK(载波相位实时动态差分技术)设备对之前已经设定的32个车身的参考点进行测绘,图2所示为车模型绘制示意图,首先进行建立车身的模型,最后结合车身模型,并依据三维姿态解算算法能够算出车身每个点精确的位置信息。
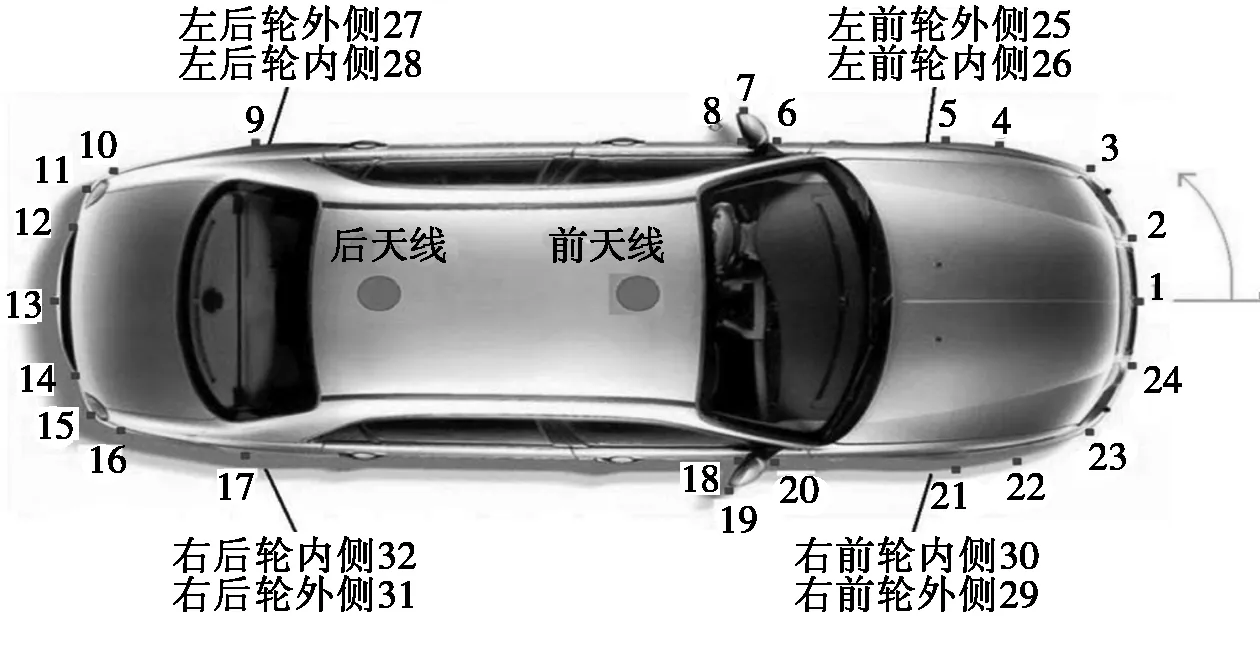
图2 车模型绘制示意图
如图2所示,分别测绘出32个点在水平面上的垂直投影坐标以及后天线位置坐标,将后天线作为坐标的原点,建立车型模型几何向量M,如下式所示,其中x值为东西向坐标值(向东为正),y值为南北向坐标值(向北为正),z轴为天向坐标值(天向为正)。
设实时车辆俯仰θ,车头向上为正,φ为车辆的翻滚角,从车头向车尾部方向看,逆时针转动为正,车辆航向为Ψ,从正北方向顺时针旋转依次为0~359.9度,那么可以得出三维解算矩阵K。

车辆在运动的过程中采集后天线实时坐标为P,车辆模型上第n点向量Mn,
那么车身32个点的坐标向量矩阵Mc=P+K*M,车辆模型第n点的实时三维坐标为Pn=P+K*Mn。
车辆三维模型解算上的误差主要受车辆航向的精度影响。因为考场地图都使用的是平面地图,所以定位三维坐标中,对评判结果有影响的只有是X轴和Y轴的坐标数据。设X轴、Y轴定位误差分别是ΔX、ΔY。X轴、Y轴定位误差对综合误差影响相似,因此只需对X轴或者Y轴进行误差分析,就可以得出综合结果,即
Xn=X+cosΨcosθXn+(cosΨsinθsinφ-sinΨcosφ)yn
-(cosΨsinθcosφ+sinΨsinφ)h
设后天线x坐标值的误差为Δx,依据GNSS差分定位模块的参数,Δx最大值一般是在±0.008(单位:米),航向精度为0.2/R度(R为前天线到后天线的距离),R的值越大,精度也就会越高,但受车身长度的限制,R的最大值约为2。以桑塔纳为例,Xn=3.1,yn=0,h=1.5。为简化误差分析模型,我们在车辆的航向、俯仰、翻滚值都为0的状态来进行分析。根据以上的分析可知,航向对定位误差影响比较小,但俯仰值对定位精度的影响相对较大,翻滚和俯仰对定位误差的影响相似。
3 总结和展望
本文讨论了基于GNSS差分定位的两种关键算法:车身三维模型定位算法与车辆压线检测算法;提出了车身三维模型定位的计算方法,分析了车身定位误差。基于GNSS差分定位的高精度智能车载驾考评判系统的应用使驾校的教学效率和服务质量提升了档次,增强了驾校的核心竞争力,促进了办学的规范化和正规化,提升了学员的驾驶技能。
[1] 陈玉宝,安涛,胡姮.基于GNSS差分定位的天气雷达坐标精确定位研究[J].气象,2013(3):389-393.
[2] 汪捷,徐冠楠.基于GNSS差分相对定位方法的研究与探讨[J].现代导航,2015(3):250-256.
[3] 李豹,王飞,朱银兵,等.GNSS不同定位模式性能比较与分析[J].舰船电子工程,2013(6):68-71.
[4] 吴晓东,沈刚,夏威.交通行业GNSS差分信息播发技术研究[J].全球定位系统,2015(1):41-45.
[5] 高为广,楼益栋,刘杨,等.卫星导航系统差分增强技术发展研究[J].测绘科学,2013(1):51-53.
[6] 刘玥.支持在航载波相位差分定位方法研究[D].哈尔滨:哈尔滨工程大学,2013.
