MATLAB SISO工具箱在机电控制技术实践教学中的应用
2018-05-13郭庆,蒋丹,李辉
郭 庆,蒋 丹,李 辉
(1.电子科技大学 航空航天学院,四川 成都 611731;2.电子科技大学 机械电子工程学院,四川 成都 611731)
机电控制技术课程是高等院校自动化和机械电子工程专业的一门重要课程[1-2]。在实践教学中,通过对机电对象数学建模、控制律设计及闭环回路数字仿真,让学生获得机电控制PC设计技术的基本知识、理论以及技能[3]。随着计算机辅助教学的发展,MATLAB中关于控制系统设计的toolbox在机电控制实践教学中发挥着举足轻重的作用。
MATLAB的SISO(single input single output)工具箱是一种在MATLAB环境下开发的单输入单输出系统分析工具,可以用来进行一般线性系统对象的闭环控制系统设计[4-5]。目前,SISO工具箱已作为基本控制系统设计模块,广泛应用于飞行器、伺服电机、工业机器人等控制系统设计与仿真[6]。由于其具有可视化的控制系统频域稳定性能分析能力,能够在很大程度上减小控制工程师对系统稳定性、系统动态响应性能以及稳态控制精度等指标判别误差,提高控制律设计的准确性和可靠性,从理论上指导控制工程中遇到的系统稳定性、控制带宽等问题。
SISO工具箱中包含了控制系统设计所需要的对象模型、控制律、传感器模型和前向放大4个基本模块[7],其中,对象模型一般包含对象的传递函数模型和执行机构模型,传感器模型描述测量环节的动态特性,前向放大模块对输入期望指令进行放大和滤波处理,控制律是整个闭环控制回路分析与设计的核心模块,也是利用SISO工具进行控制系统设计的主要工作任务。
本文以建立的一个四阶阀控液压缸数学模型为机电控制对象,采用SISO工具箱设计PI控制律结构,优化其控制参数,根据其频域稳定裕度和时域阶跃响应结果来分析闭环控制系统的稳定性、动态响应性能以及稳态控制精度等指标,并对整个控制回路进行阶跃仿真。通过这一实践教学环节,帮助学生了解控制系统理论设计与分析方法,同时可以使学生尽快掌握MATLAB SISO工具箱软件。
1 阀控液压缸控制回路
1.1 阀控液压缸基本原理
阀控液压缸的基本原理如图1所示[8]。通过定量泵5将油箱6中的液压油吸入,通过伺服阀1的节流控制,调节进油管路中的液压流量,进入液压缸2无杆腔后,无杆腔中的压力大于有杆腔,使得液压缸推动外负载往右移动。无杆腔中的液压油经过回油管路和伺服阀后流回油箱。当进油管路中的液压油压力大于设定的阈值后,溢流阀4工作,将系统压力调整到阈值附近,保证系统安全。
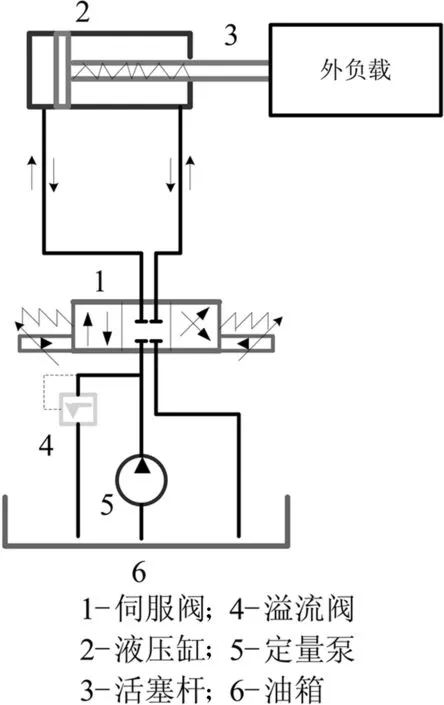
图1 阀控液压缸基本原理示意图
通过对阀控液压缸基本原理的讲解,学生可以掌握整个液压控制回路的基本特点,了解到伺服阀是控制元件,液压缸是一个控制执行机构,液压泵为系统的动力源。利用位移传感器测量液压缸实际位置,与期望的位置形成误差,作为控制律设计的输入;通过设计的控制律后输出伺服阀电压控制信号,并改变伺服阀的阀芯位移,从而对液压油的流量进行控制,驱动液压缸作直线往复运动。
1.2 阀控液压缸回路数学建模
学生理解了阀控液压缸回路基本原理之后,可以实现该回路各个环节的数学建模。
首先建立伺服阀的一阶传递函数模型为[9]:

式中,Ksv为伺服阀放大增益,Tsv为响应时间常数。
液压缸的三阶传递函数模型表示为[10]:

式中,a0、bi(i=0,1,2,3)为液压模型参数,由液压缸结构特征决定。
忽略位移传感器响应滞后,令其传递函数模型为Gm(s)=1。至此,学生可以建立阀控液压缸的闭环控制回路如图2所示。

图2 阀控液压缸闭环控制回路
其中PI控制律的结构为Gc(s)=Kp+Ki/s,Kp和Ki为比例和积分控制参数,需要学生下一步利用SISO工具箱进行重点设计。
2 阀控液压缸控制律设计
2.1 SISO工具箱环境
MATLAB SISO是一种典型的单输入单输出控制系统设计与分析工具箱。在MATLAB命令行敲入 “sisotool”,则会弹出 “Control and Estimation Tools Manager”和 “SISO Design Task”界面,如图3所示。
Control and Estimation Tools Manager是对控制回路中的各个模块进行配置。其中,G代表控制对象模块,H表示传感器模块,F代表前向放大模块,C代表控制律。在配置过程中,学生需要将表控制对象模型配置为G=Gsv(s)Ga(s),将传感器模型配置为H=1,将前向放大模型配置为F=0.079。配置完毕后,可以利用SISO Design Task进行控制律设计。
在SISO Design Task中,包括3个频域的动态分析环境:1)左上边的 “Root Locus Editor”为开环根轨迹变化曲线,反映阀控液压缸闭环系统的闭环极点位置,如果位置大于零,则闭环系统不稳定;2)右边2个子图 “Open Loop Bode Editor”为开环系统波特图幅值和相位变化曲线,反映闭环系统的频域相对稳定裕度和截止频率;3)左下边子图 “Bode Editor for Closed Loop”为系统的闭环Bode图,反映闭环系统的带宽。
通过这一步对阀控液压缸控制回路的模块配置,可以使学生更好地熟悉MATLAB SISO工具环境,特别是了解负反馈的概念,回路中各模块直接的关系以及数据输入等。SISO工具之所以成为控制系统工程师必备的控制系统设计工具,是因为其具有良好的可视化界面,工程师配置模型和调整控制参数比较简单直观。相比采用MATLAB的m文件编写模块和使用margin指令来说,SISO工具环境比较友好,与用户的交互性比较好。
2.2 PI控制律设计
当学生熟悉完SISO工具箱环境后,就可以进行阀控液压缸控制律设计。这里控制律采用PI+滞后环节的结构,表示如下:
将控制律代入 “Control and Estimation Tools Manager”界面中的 “Compensator Editor”中,配置如图4所示。这里将PI控制律的比例参数Kp=150,积分参数Ki=15,滞后环节参数b=0.073。设计滞后校正环节1/(1+bs)的目的是保证系统存在初始误差时提高控制量u的动态平稳性,消除控制饱和现象。

图4 控制律结构与参数设计界面
学生将控制律结构和参数设计好之后,可以通过分析 “SISO Design Task”中三个频域的动态曲线变化结果,如图5所示。从根轨迹图中可以直观看出,阀控液压缸闭环系统的极点全部位于左半平面,由自动控制原理[11]可知,系统是稳定的。再由开环Bode图可知,系统的幅值裕度为GM=20.1 dB,相位裕度为PM=54.3 deg,截止频率为ωc=7.73 rad/s。因此满足GM>6 dB,PM>30 deg的基本稳定性能要求,进一步说明该阀控液压缸闭环系统是稳定的,且动态性能良好。截止频率与闭环系统的带宽在数值上比较接近,因此该闭环系统的带宽大约为1 Hz。
图5是以频域指标形式给出的闭环系统稳定性和动态性能指标,学生理解起来较抽象,因此下一步通过时域上直观的阶跃响应曲线可以让学生完全理解该系统的稳定性和动态及稳态响应性能。
2.3 闭环系统阶跃响应结果分析
利用 “SISO Design Task” 中的 “Analysis” 选项,可以分析闭环系统阶跃仿真结果,如图6和图7所示。其中图6为输入指令为阶跃指令yd=79 mm,液压缸实际位置y从零变化到稳态的过程。由图6和图7可知,液压缸位置通过设计的控制律,经过大约0.5 s的时间,可以调整到阶跃指令附近,稳态误差小于5%。另外,系统的超调量大约14%,并且无持续振荡现象,因此该系统的时域响应指标良好,进一步论证了图5给出的频域性能指标的正确性。

图6 阀控液压缸阶跃指令对应的液压缸位置响应

图7 阀控液压缸闭环系统控制律输出的控制电压
3 控制参数优化设计
学生在了解控制律设计基本思路之后,还可以利用SISO工具对PI控制参数进行优化设计。例如,调整 “Compensator Editor”中的控制参数为:
那么对应的 “SISO Design Task”3个频域的动态曲线变化结果如图8所示。由开环Bode图可知,系统的幅值裕度为GM=9.64 dB,相位裕度为PM=24.7 deg,表示系统的相对稳定裕度减小,频域性能下降。图9和图10给出了对应的阀控液压缸闭环系统时域仿真结果,可知液压缸的位置响应和控制电压都出现了振荡现象。因此说明该PI控制参数不如原来的控制参数良好。通过该过程,学生可以学会怎么对阀控液压缸系统的闭环控制律进行优化设计,逐步满足指定的性能要求。

图8 控制参数变化之后3个频域动态曲线变化结果
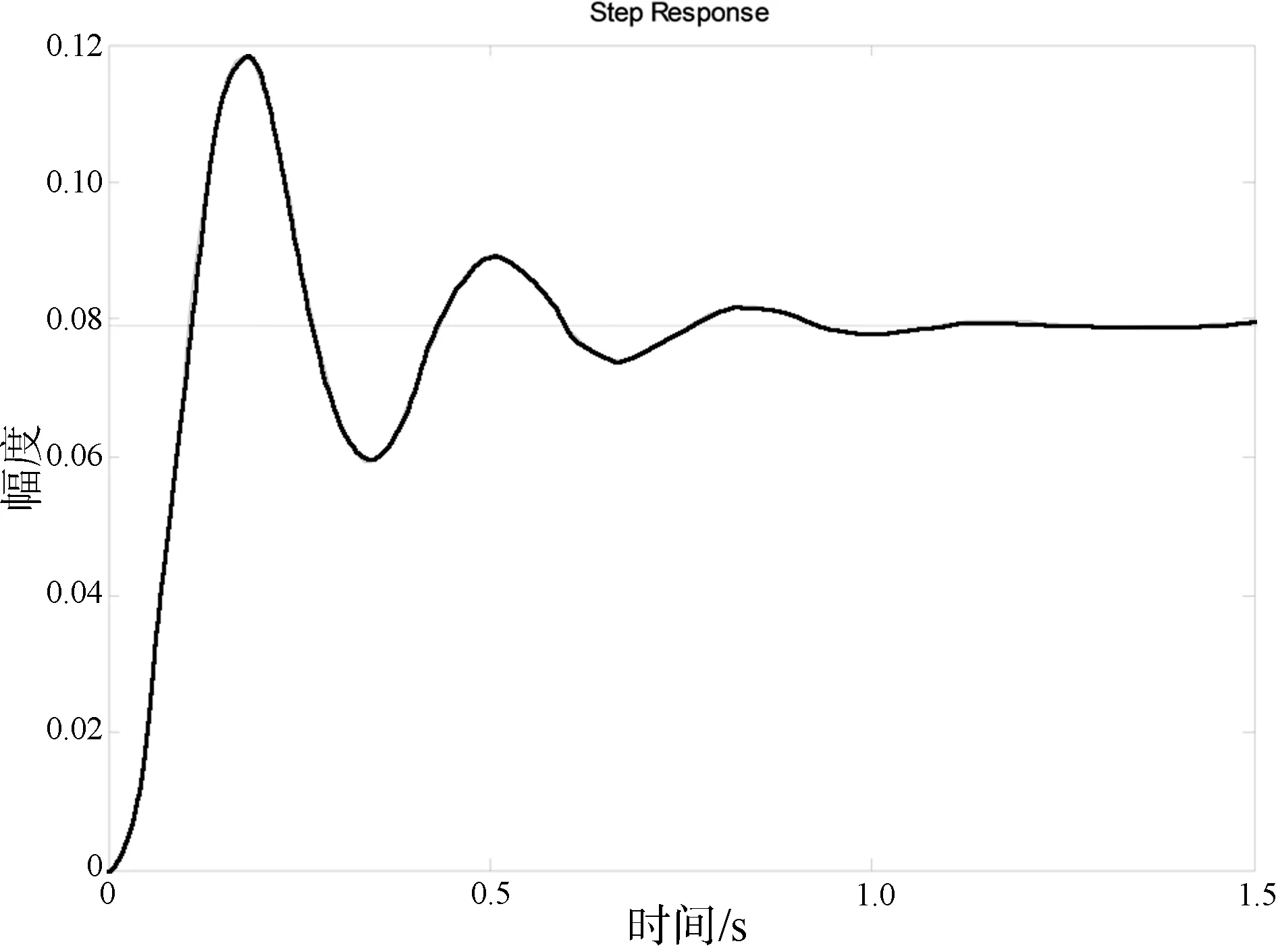
图9 阀控液压缸阶跃指令对应的液压缸位置响应

图10 控制参数变化之后控制律输出的控制电压
4 结束语
利用MATLAB SISO工具箱的可视化分析环境辅助机电控制技术的实践教学,通过利用SISO工具箱中的环境界面,可以实现阀控液压缸模块化配置、控制律设计与优化以及闭环控制回路稳定性分析,帮助学生加深对机电控制系统设计的理解和掌握,激发学习兴趣和培养工程意识。
[1]杨汝清,张伟军.机电控制技术[M].北京:科学出版社,2009.
[2]郁建平.机电控制技术[M].北京:科学出版社,2010.
[3]朱照红.机电控制技术[M].北京:机械工业出版社,2011.
[4]王雪,陈今润,张赟宁.基于SISO Design Tool设计系统的PID整定[J].自动化技术与应用,2006,25(9):9-11.
[5]苏东海,崔晓.应用MATLAB中的SISO设计工具对线性系统进行校正[J].机床与液压,2005(8):193-194.
[6]董玉红,张立勋.基于MATLAB的数控进给伺服系统设计与仿真[J].应用科技,2005,32(1):1-3.
[7]李国勇,谢克明,杨丽娟.计算机仿真技术与CAD:基于MATLAB的控制系统[M].北京:电子工业出版社,2008.
[8]蒋丹,郑源,王成明,等.任务驱动法在液压传动实践教学中的应用[J].实验科学与技术,2012,10(6):224-226.
[9]GUO Q,SUN P,YIN J M,et al.Parametric adaptive estimation and backstepping control of electro-hydraulic actuator with decayed memory filter[J].ISA Transactions.2016,62:202-214.
[10]吴振顺.液压控制系统[M].北京:高等教育出版社,2008.
[11]李友善.自动控制原理 (上)[M].北京:国防工业出版社,2005.
