应用MEMS陀螺仪和加速度计的汽车运动姿态测量
2018-05-10曹景伟朱宝全
曹景伟,朱宝全
(东北林业大学 交通学院, 哈尔滨 150040)
改革开放以来,我国科学技术得到迅速发展,人民生活水平逐步提升,汽车已经成为人们日常生活中不可或缺的代步工具。汽车保有量的逐年攀升导致道路交通事故频发,汽车安全性已经成为人们日益关注的焦点。汽车安全技术已经成为当今汽车系统主要的研究方向之一。汽车安全技术需要诸多精确的汽车行驶状态参数,以此来确定汽车是否处于一种相对安全的运行状态[1-3],因此汽车在各种工况下的运动姿态测量对于保障汽车的安全性显得尤为重要。
惯性技术产生于20世纪初,到目前为止已有百余年研究历史。传统上一般采用机械转子陀螺构成机械平台对汽车运动姿态进行实时测量,但是由于测量平台体积较大、安装不便、运行不稳定,极大地影响了实验数据的采集和结论的判定[4]。近年来,MEMS(micro-electro-mechanical system)传感器技术得到迅猛发展,因其具有体积小、成本低、能耗低、功率高、灵敏度高等诸多优点,在汽车运行状态测量方面得到了广泛应用[5-7]。
汽车运动姿态解算方法包括欧拉角法、方向余弦法和四元数法等。在使用欧拉角法求解姿态微分方程时,如果俯仰角低于90°,计算结果较为准确,如果俯仰角接近90°,方程会出现退化现象[8-10]。方向余弦法可以避免欧拉角法方程退化的现象发生,但在求解过程中要计算9个联立微分方程,计算量较大,且实时解算比较困难,在工程上并不实用[11]。意大利比萨大学的Angelo M.Savatin[12]提出基于四元数的扩展卡尔曼滤波算法,同时在求解过程中引入自适应的测量噪声协方差来减少线性加速度和周围局部磁场的干扰,较好地提高了姿态测量精度。
本文针对汽车实际运行环境,运用集MEMS陀螺仪和加速度计为一体的MPU-6050传感器模块进行汽车运动姿态测量,为研究汽车在不同运动姿态下的运动规律、提高汽车行驶安全性提供一定的参考依据。
1 姿态测量的基本原理
汽车运行姿态测量主要利用MEMS传感器技术,通过集MEMS陀螺仪和加速度计为一体的MPU-6050传感器模块采集运行姿态数据。实验时首先将MPU-6050传感器模块安装在一个立方体小盒中,同时将其固定于汽车质心位置处,并保证汽车与MPU-6050传感器模块固结于同一坐标轴上。MPU-6050传感器模块将采集到的数据经坐标变换和姿态解算后,以加速度包、角速度包和角度包3个数据包的形式传至上位机,然后通过显示器实时显示三轴加速度、角速度和角度的曲线变化。汽车在不同运动姿态下的姿态数据可以随时记录,形成固定文件并保存在存储模块中,可以随时打开并导入Matlab中,方便日后的分析与整理。
2 姿态测量所需硬件
汽车运行姿态测量所用到的主要硬件包括MPU-6050传感器模块、数据处理单元、显示器、存储模块以及车载直流电源等。MPU-6050传感器模块内部集三轴MEMS陀螺仪和三轴加速计为一体,可以实时采集汽车运动时的三轴加速度、角速度和角度。数据处理单元将采集到的数据进行坐标变换和姿态解算处理,以加速度包、角速度包和角度包的形式传至上位机。显示器内置上位机,将数据处理单元发送过来的3个数据包顺序输出,生成可以实时显示的随时间不断变化的动态曲线。上位机可以随时开始记录所需要的数据,并在数据采集结束之后停止记录,数据被保存在存储模块中,可以随时打开已存数据,便于进一步的整理与分析。
MPU-6050传感器模块将三轴MEMS陀螺仪、三轴加速计与单一传感器模块整合在一起,同时融合九轴运动感测演算技术的六轴运动处理组件,其内部自带电压稳定电路,可以兼容3.3 V/5 V的嵌入式系统,连接便捷。传感器模块采用先进的数字滤波技术,配合动态卡尔曼滤波算法,能有效降低测量噪声,可以实现动态准确输出,测量精度可以精确到0.01°,可靠性高,具有良好的综合性能。
本研究使用的MPU-6050传感器模块简图如图1所示,技术参数如表1所示。
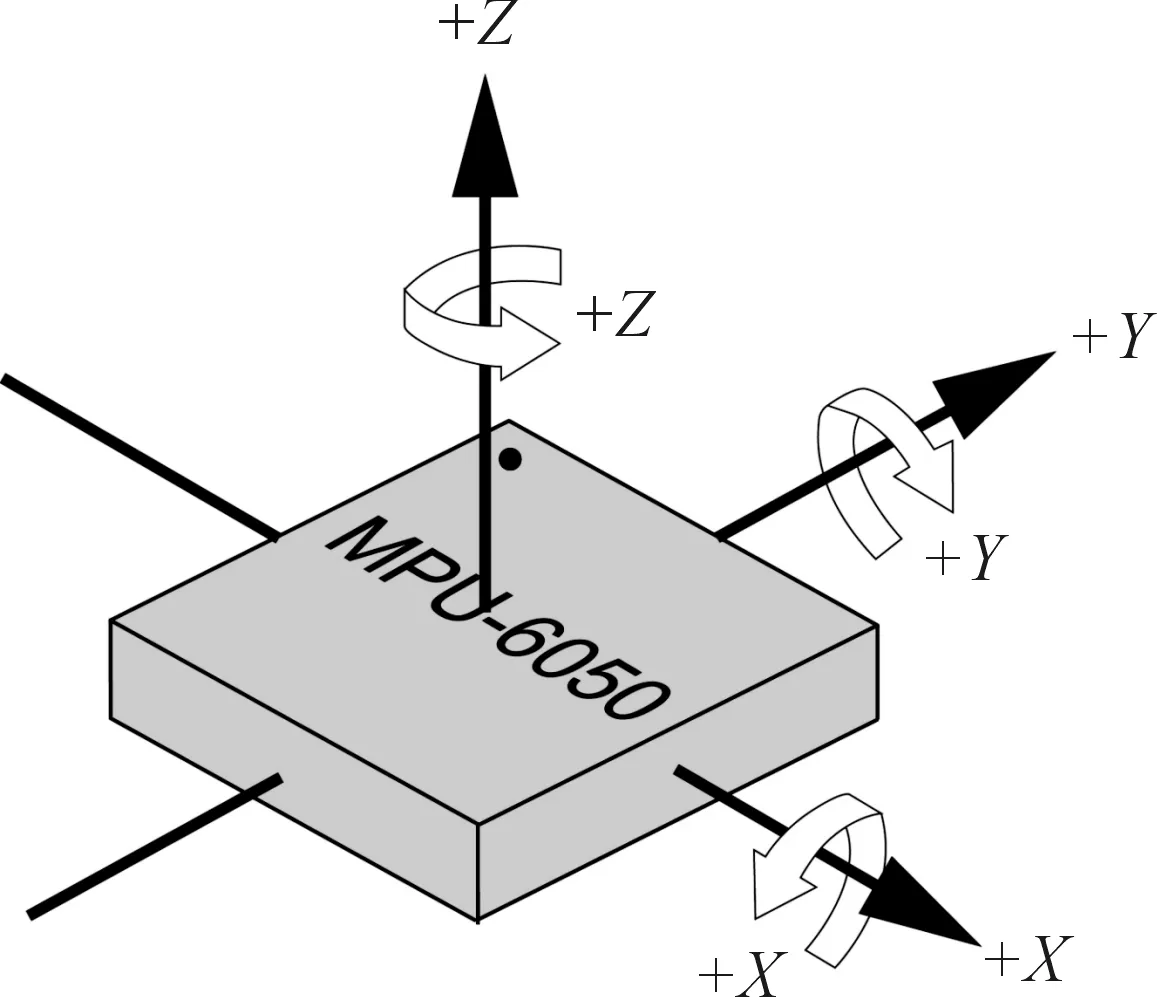
图1 MPU-6050传感器模块简图

表1 MPU-6050传感器模块技术参数
MPU-6050传感器模块在3个方向上分别采用了一个AD转换器,将角度的变化信息转换为数字量进行输出,同时3个方向的角速度值通过积分得到角度值。如图2所示,MEMS陀螺仪与CPU之间采用I2C时序通信,其基准电压通过上拉电阻接3.3 V电源。此外,MEMS陀螺仪具有转换完毕的信号线,该信号线与CPU的外部中断口相连,CPU可以通过中断方式或者查询方式读取陀螺仪的状态。
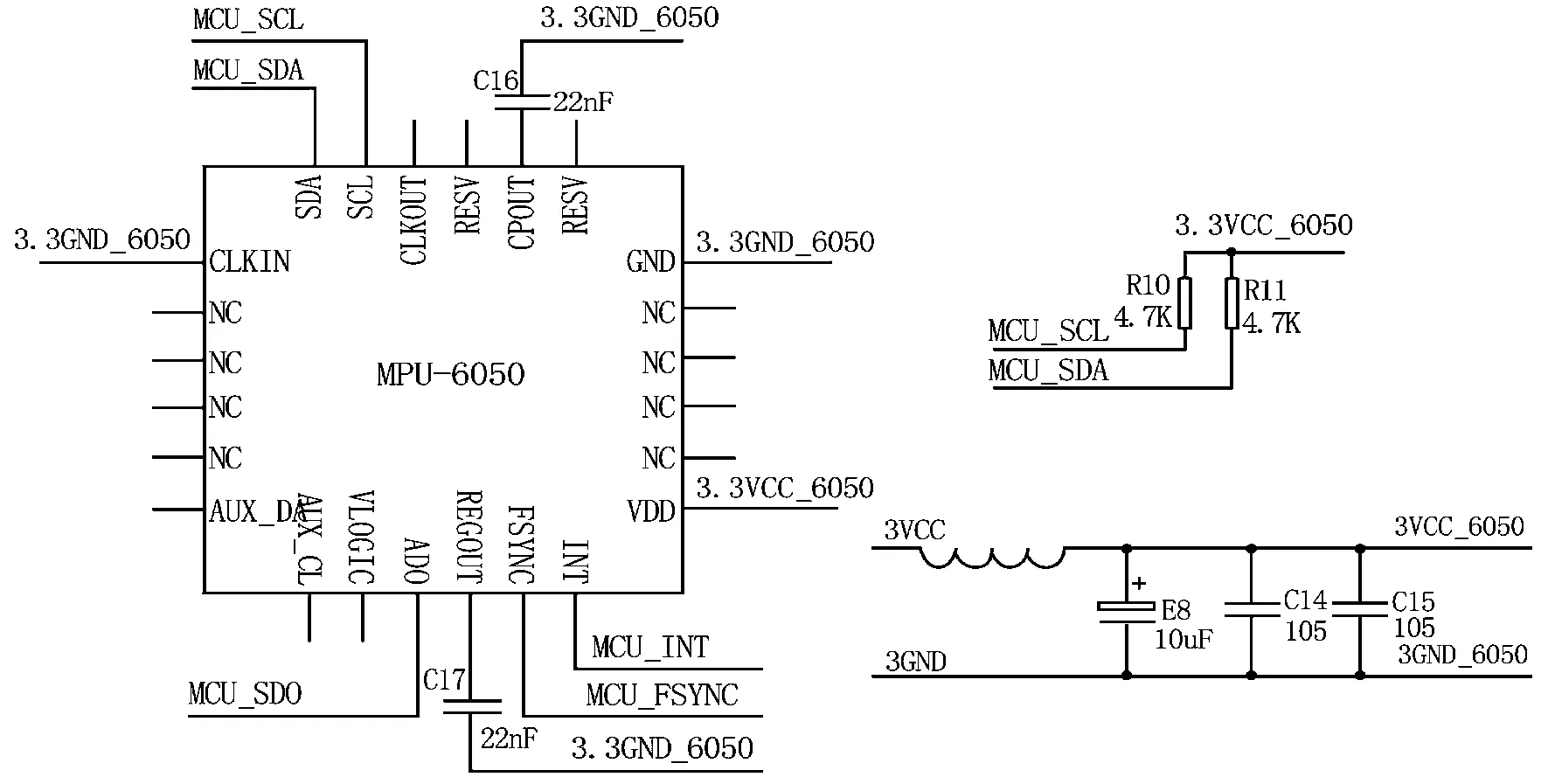
图2 陀螺仪电路原理
3 姿态角的测量
3.1 坐标系与姿态角
载体导航坐标系OXYZ和载体平台坐标系Oxyz是汽车运动姿态测量中重要的2个坐标参考系,如图3所示。载体导航坐标系OXYZ的原点随汽车重心移动,同时其与地球惯性坐标系的Z轴保持平行;载体平台坐标系通常固定于车身,当车身姿态发生变化时,3轴向随即发生改变。汽车运动姿态测量实际上就是对载体平台坐标系Oxyz相对于载体导航坐标系OXYZ的角度偏移量进行测量。姿态角一般包括3个:俯仰角α(z轴与OXZ平面的夹角)、横滚角β(x轴与OXY平面的夹角)、航向角γ(y轴与OYZ平面的夹角)。

图3 坐标系与姿态角
刚体在三维空间的转动用欧拉角进行表示,坐标参考系可以按照先后顺序,以绕着转动轴转动的形式从最初的参考系到三维空间内任意的参考系。所谓的载体平台的空间姿态实质上为平台从起始位置依次绕Z轴、X轴、Y轴做基本旋转后到下一位置的复合结果,如图4所示。根据需要,平台初始位置所在的坐标系为O-X0Y0Z0,当运动到任意位置时所在的坐标系为O‴-X‴Y‴Z‴,平台的任意运动可以分解为平台绕X、Y、Z轴的基本旋转,顺序依次为:Z0轴旋转到O′-X′Y′Z′,绕X0轴旋转到O″-X″Y″Z″,绕Y0轴旋转到O‴-X‴Y‴Z‴。
(1)
式中:(X‴,Y‴,Z‴)为平台经坐标系旋转后的空间位置坐标;(X,Y,Z)为空间起始位置坐标。

图4 坐标变换
各次基本旋转对应的变换矩阵为

(2)
式中:α为俯仰角(°);β为横滚角(°);γ为航向角(°)。
如果α、β、γ都为较小角度时,则忽略较小角度之间的高阶小量,简化旋转矩阵为
(3)
式中:α为俯仰角(°);β为横滚角(°);γ为航向角(°)。
在使用上述简化旋转矩阵时,定义俯仰角(pitch)为在空间内平台绕Y轴旋转角度,横滚角(roll)为在空间内平台绕X轴旋转角度,航向角(yaw)为在空间内平台绕Z轴旋转角度,如果平台起始位置为水平时,则俯仰角、横滚角和航向角为0。
对车身姿态进行测量要分别确定俯仰角、横滚角和航向角的大小。当汽车处于静止或匀速直线运动状态时,三轴加速度计的输出值实际为重力加速度在3轴方向上的分量值,其倾角可以根据求解反三角函数得到。但当汽车处于高速运动状态时,加速度计会受到除重力加速度以外的加速度的影响,此时如果继续采用加速度计计算倾角则会产生较大的误差,影响数据的准确性。
为了解决这个问题,加入MEMS陀螺仪对当前角速度变化进行辅助测量,可以在瞬间实现对角速度变化的积分且将计算数据累加在一起,快速得到倾角。然而,由于MEMS陀螺长时间使用会造成静态零点漂移误差,使有时计算的倾角并不准确,因此在实际姿态测量中要将MEMS陀螺仪和加速度计测量的数据进行滤波融合,才能输出准确的姿态角。
3.2 MEMS陀螺仪的空间姿态测量
MPU-6050传感器模块内置三轴陀螺仪L3G4200D,它能将3轴角速度动态输出,其输出值可以实现最高16位的精度,测量范围可以实现最大±2 000(°)/s。
利用陀螺仪可以在平台动态条件下实现积分累加计算,且测量倾角相当准确。由于陀螺仪存在静态偏置误差,所以在测量之前要对陀螺仪进行零点偏置补偿。
设陀螺仪在X、Y、Z三轴的输出值分别为 GyroX、GyroY和GyroZ,零点偏置为GyroX_offset、GyroY_offset、GyroZ_offset,则各轴对角速度积分即为平台绕该轴旋转的角度,有:
(4)

(5)

(6)
式中:angleGα为陀螺仪计算俯仰角(rad);angleGβ为陀螺仪计算横滚角(rad);angleGγ为陀螺仪计算航向角(rad)。
3.3 加速度计的空间姿态测量
MPU-6050传感器模块采用的加速度计为3轴数字输出的加速度计ADXL345,这是一种低成本、低功耗的测量元件,可以良好地测量3轴加速度的方向和大小,且各轴的测量输出值可以实现最高16位精度,测量值范围最大可达±16g。图5为加速度计的输出值方向和大小示意图。

图5 加速度计输出值示意图

(7)


(8)

(9)

(10)
式中RX、RY、RZ分别为三轴归一化的结果(m/s2)。
由本文定义并根据图3可算得
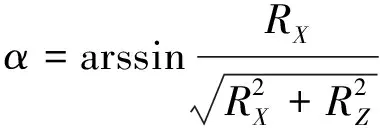
(11)
式中α为俯仰角(°)。
(12)
式中β为横滚角(°)。
(13)
式中γ为航向角(°)。
4 上位机显示
4.1 上位机软件执行流程
系统软件在整体运行过程中的上位机软件执行流程如图6所示。

图6 上位机软件执行流程
在数据正式采集之前,首先要初始化配置程序,上位机中可以自动检测并判断串口上是否有信号,如果串口上有信号,则自动连接完成,进行下一步的数据采集。数据正式采集时,首先要对角度的正负进行判断,此时要通12位二进制的最高位进行0和1的判断,0表示数据为正,1表示数据为负。然后要对检测数据是否在非线性区间进行判断,如果在非线性区间,要调用非线性修正程序进行修正,同时完成存储;如果不在非线性区间,则直接存储。在设置程序中,设置达到50个数据进行1次误差处理,假若没有达到50个数据则重复往复步骤,直至完成数据的显示与存储。
4.2 上位机的设置界面
打开显示器中上位机的设置界面,如图7所示。首先点击串口配置,选择合适的COM串口,然后点击波特率,选择115 200 bit/s作为默认波特率。在设置选项中,包括语言、输出速率、静止检测门限、带宽、方向、Z轴角度归零和加速度计校准等诸多选择栏,语言包括中文和英文,可自由切换。输出速率默认选择1 Hz。静止检测门限在0.122~1.831(°)/s可供选择,默认选择0.488(°)/s。带宽在5~260 Hz可供选择,默认选择21 Hz。方向包括水平和垂直,默认选择水平。Z轴角度归零和加速度计校准在数据采集前初始化。
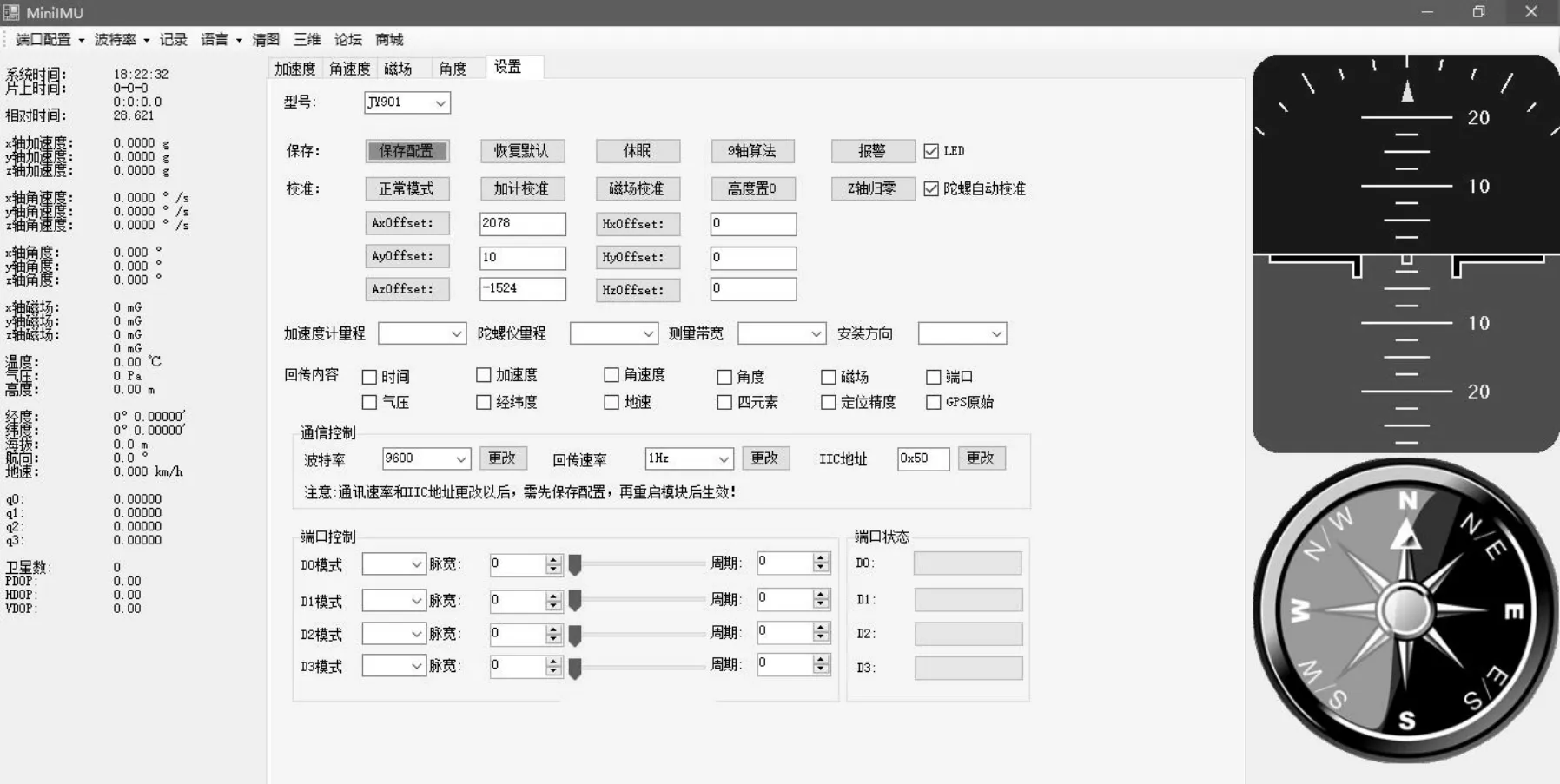
图7 上位机的设置界面
MPU-6050传感器模块将经姿态解算后的数据传至上位机,每帧数据以加速度包、角速度包和角度包的形式顺序输出。同时可自定义波特率,定义波特率为115 200 bit/s时,每隔10 ms输出1帧数据,定义波特率为9 600 bit/s时,每隔50 ms输出1帧数据。
4.3 上位机显示的试验结果
在不同的汽车运动姿态下,测量出的3轴加速度、角速度和角度的变化有显著区别。为研究汽车在不同运动姿态下的运动规律,可以在不同的运动姿态下记录当时的3轴加速度、角速度和角度的曲线变化。以实际道路实验为例,实验车辆进行了4次加减速实验,且在经过每2次加减速实验之后重新回到车辆起动位置。汽车当时的运动状态通过ScanMaster-ELM软件实时监测,该软件与汽车OBD(on board diagnostics)系统通过蓝牙无线连接,可以实时测量汽车当时运动状态下的车辆参数,如图8所示。

图8 当时运行状态下车辆参数变化曲线界面
当汽车开始实验时,点击上位机中的记录选项,数据开始保存,形成文件并保存在存储模块中。当数据采集结束时,点击停止选项,数据停止记录。实验数据文件可直接导入到Matlab软件中,编译运行后得到当时运动姿态下3轴加速度、角速度、角度以及传感器模块温度的曲线变化,如图9所示。实验结果表明:汽车运动姿态角度变化与汽车当时的运行状态保持一致。
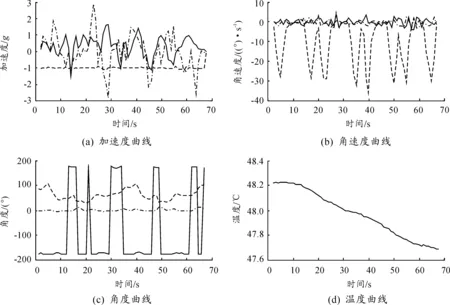
图9 三轴运动姿态角度变化曲线
图10为实验所得汽车运动姿态估计误差曲线,可以直观地看出估计误差相对较小,没有超过1°,能够满足汽车运动姿态测量的基本要求。

图10 运动姿态估计误差曲线
5 结束语
本文针对在汽车运动姿态测量上存在的传统实验平台体积较大、安装不便、运行不稳定等问题,由集MEMS陀螺仪和加速度计为一体的MPU-6050传感器模块采集3轴加速度、角速度和角度数据,经滤波融合与姿态解算后,通过显示器中的上位机界面实现对汽车运动姿态测量数据的实时显示和存储保存。实验结果表明:应用MEMS陀螺仪和加速度计的汽车运动姿态测量精度较高,受外界影响较小,具有良好的可靠性,可为进一步研究汽车在不同运动姿态下的运动规律,提高汽车行驶安全性能提供一定的参考依据。
参考文献:
[1] 赵灵.基于MEMS陀螺仪的稳定平台关键技术研究[D].南京:南京理工大学,2012.
[2] 都雪静,田雨蒙.全铝车身电动轿车正面碰撞仿真[J].重庆理工大学学报(自然科学),2016,30(8):20-26.
[3] 赵锋,金智林,冯博,等.追尾碰撞的车辆稳定性分析与控制[J].重庆理工大学学报(自然科学),2016,30(5):20-26.
[4] 闫冬,管欣,高振海.基于MEMS技术的微惯性传感器及在汽车上的应用[J].汽车技术,2006(2):1-6.
[5] 刘付强.基于MEMS器件的捷联姿态测量系统技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[6] 吴黎明,张力锴,李怡凡.基于ANN和单个三轴加速度传感器的汽车运动姿态测量[J].传感技术学报,2011(6):923-927.
[7] 赵玲,李文靖,李长安,等.基于ADIS16355的汽车驾驶操作信号采集系统[J].电子技术应用,2012(2):37-39.
[8] 王建锋,张红,李平.基于MEMS器件的车辆姿态测量系统开发[J].中国科技论文在线,2015,10(19):2281-2286.
[9] 包瑞新.车辆姿态多传感器检测系统与信息融合算法研究[D].沈阳:沈阳农业大学,2011.
[10] 李祥云.基于多维加速度传感器的车辆姿态测量系统研究与设计[D].哈尔滨:哈尔滨工业大学,2015.
[11] 任亮,白国柱,周经美等.基于MEMS的车辆姿态感知系统[J].计算机系统应用,2014,23(8):84-89.
[12] ANGELO M S.Quaternion-Based Extended Kalman Filter for Determining Orientation by Inertial and Magnetic Sensing[J].IEEE Transactions on Biomedical Engineering,2006, 53(7):112-119.