紧缩场测试扫描架平面度控制系统研制
2018-05-10孙祥溪
寇 鹏 孙祥溪 任 涛 孙 雨
(北京无线电计量测试研究所,北京 100039)
1 引 言
扫描架是用于测量紧缩场微波或毫米波平面度的专用设备。随着技术的发展,紧缩场形成的静区范围更大,频率更高,这对测试扫描架的平面度指标提出相应更高的要求。而大型扫描架由于结构尺寸大,易受温度变化、环境振动、重力形变影响产生形变,单纯靠机械加工及装配工艺已经无法实现对高平面度控制的要求。因此,需要采取相应的补偿措施来满足紧缩场测试的需求[1]。
已有的扫描架平面度补偿方法多采用半实时的方式。北京航空航天大学张厚江等[2]研制的极坐标型扫描架先将各测试点补偿值预存于系统中,测试过程中利用小车微调机构进行补偿。该方法的缺点在于所有补偿点均为前期实验阶段标定的预存值,而实际应用过程中受设备异地搬运、长期使用机械结构变形等因素的影响,预存的设置数据则不能一直保证补偿数据的正确性;北京长城计量测试技术研究所曹铁泽等[3]研制的圆柱形极坐标扫描架通过分别测试扫描架各测试点的位置偏差和微波信号数据得到补偿量,待测试完成后通过软件方法进行补偿,该方法的缺点在于补偿结果为二次处理,非实时进行,测量效率低,且由于将激光发射器安装于设备本体上,由于设备底座不稳定、测试过程中设备重心变化等因素影响,不能保证激光发射器扫描平面与紧缩场静区的相对位置不变。
上述半实时补偿方法在每次测试之前,均需先通过测试建立误差修正表,再进行补偿。效率相对较低且不能避免扫描架在测试过程中因环境等因素影响带来的误差。为保证测试效率以及测试结果的准确性,本文针对自研的扫描区域为Φ6m的大型极化扫描架,设计了一种扫描架平面度实时补偿系统。
2 扫描架平面度实时补偿系统设计
2.1 补偿系统组成
扫描架平面度实时补偿系统主要由激光平面发射器、位置敏感探测器PSD、控制器和伺服补偿器等组成,系统示意如图1所示。激光平面发射器固定于水平地面。伺服补偿器固定于平面扫描架的旋臂上,安装有位置敏感探测器PSD和天线组件。测试过程中伺服补偿器跟随扫描架一起运动[4,5]。
当紧缩场平面扫描架工作时,激光平面发射器发射激光束,通过自身极化旋转形成垂直于紧缩平面场微波传播方向的基准参考平面。位置敏感探测器PSD接收激光信号,计算其感应区零位与基准参考平面的位置偏差并实时反馈给控制器。控制器通过运动控制卡中的伺服算法生成速度控制指令给驱动器,由驱动器驱动伺服补偿器进给补偿,使位置敏感探测器PSD感应区零位与激光基准参考面重合,从而实现扫描面平面度误差动态补偿[6]。

图1 扫描架平面度补偿系统示意图Fig.1 Diagram of compensation system for planeness of compact range
2.2 伺服补偿器设计
伺服补偿器是平面度补偿的执行单元,主要包括天线进给补偿模块、天线极化模块、靶标环形极化模块等,如图2所示。

图2 伺服补偿器结构示意图Fig.2 Diagram of servo compensator
天线进给补偿模块采用八边形筒型支撑结构,配合高精度滚珠丝杠副传动,带动平面度测量设备及控制设备一同完成天线平面的平面度补偿动作。天线极化模块采用同步带轮带动双导程消隙蜗杆的传动方式,并选用单精密交叉滚子轴承作为支撑组件,其上装有天线组件,根据测试需要带动天线组件旋转。靶标环形极化模块采用一体化结构设计,位置敏感探测器PSD安装在环形法兰面上,在主旋转运动的过程中,靶标环形极化模块同步反向旋转,保证靶标的感应接收面正对于激光发生器,以避免激光平面的感应盲区。
2.3 平面度补偿原理
扫描架平面度实时补偿系统采用精确位置的控制方式,平面误差补偿控制框图如图3所示。补偿系统利用电机编码器反馈构成速度闭环,利用光栅反馈构成位置闭环,以期望目标位置指令与位置敏感探测器反馈的位置偏差之差作为补偿指令输入。补偿系统期望目标位置始终为“0”,即使位置敏感探测器PSD感应区零位与激光基准参考面重合。
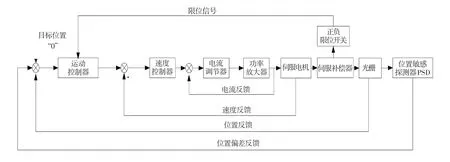
图3 平面误差补偿控制框图Fig.3 Diagram of compensation control block for planeness error
天线组件在扫描架旋臂上运动时,所产生的位置偏差信号是随机的小位移变化。位置敏感探测器PSD每20ms传回一次位置偏差。扫描架平面度实时补偿系统需能够实时、准确、快速的响应输入信号,对扫描平面度进行补偿。
扫描架平面度实时补偿系统以运动控制卡为核心控制器,实现PID+速度/加速度前馈+NOTCH滤波的控制环算法[7],如图4所示。

图4 运动控制卡控制环算法示意图Fig.4 Diagram of control loop algorithm of control card
图4中,KP为比例增益;KD为微分增益;Kvff为速度前馈增益;KI为积分增益;IM为积分模式;Kaff为加速度前馈增益;n1,n2,d1,d2为NOTCH滤波相关参数。
本实时补偿系统仅采用PID+速度/加速度前馈算法,暂不考虑NOTCH滤波,则可推导出实时补偿系统传递函数为:

式中:P(z)——位置偏差反馈;Y(z)——光栅位置反馈。
实时补偿系统通过引入速度前馈增益,可以有效减小系统的跟随误差;引入加速度前馈增益,可以有效消除系统在加减速时的跟随误差。从而提高补偿系统的响应速度和位置控制精度,保证扫描面平面度精度[8]。
3 实时补偿测试
扫描架具有半径式扫描和直径式扫描两种形式,在直线扫描臂上配置双法兰以适应不同使用方式。半径式安装时,可满足行程3100mm的要求,直径式安装时可满足行程2200mm(最大可至3100mm)的要求。如图5所示,扫描架采用半径安装方式,进行实时补偿性能测试。
扫描架结构安装完成后,开启激光平面发射器,形成基准参考平面。运行扫描架控制系统人机界面,切换至扫描架补偿测试界面,如图6所示。与位置敏感探测器PSD建立通讯,实时读取位置敏感探测器PSD感应区零位与基准参考平面的位置偏差,对扫描架平面度进行补偿。

图5 扫描架半径式安装实物图Fig.5 Radial installation of scanner

图6 补偿系统控制界面Fig.6 The interface of compensation system
本文利用激光跟踪仪分别对扫描架扫描平面的不同点进行测试,计算各点距基准平面的位置偏差和沿来波方向扫描臂的直线度。补偿前后各测试点距基准平面位置偏差及沿来波方向扫描臂的直线度对比情况如图7和图8所示。
经专业计量机构现场检测后,扫描架沿来波方向扫描臂直线度优于0.058mm。扫描面平面度RMS值为0.048mm。检测数据见表1。

图7 平面度补偿数据对比图Fig.7 Comparison chat of planeness compensation data

图8 直线度补偿前后数据对比图Fig.8 Comparison chat of straightness compensation data

表1 扫描架平面度指标检测结果Tab.1 Test indicators of scanner planeness
4 结束语
扫描架扫描形成的测试平面的平面度是紧缩场平面扫描架的关键指标。本文以自研的扫描区域φ6m大型极化扫描架为试验对象,设计了一套扫描架平面度实时补偿系统,用位置敏感探测器实时检测扫描架平面度误差,并通过伺服补偿器完成扫描架平面度补偿。测试结果表明,该平面度实时补偿系统可以快速、准确完成扫描平面度的补偿,并将扫描架平面度误差控制在0.048mm以内。该实时补偿系统已多次成功应用于紧缩场现场校准测试。
[1]胡春华,樊锐,陈五一.紧缩平面场扫描架系统研制[J].北京航空航天大学学报,2002,28(1):122-124.
[2]张厚江,樊锐,陈五一.高精度紧缩场扫描架的研制[J].机械设计与制造,2005,9:111-113.
[3]曹铁泽,孙安斌,王继虎.基于圆柱筒支撑紧缩场极坐标测试扫描系统的研制[J].新技术新仪器,2014,34(4):11-13.
[4]吴翔,何鑫,寇鹏,等.一种大型紧缩场极坐标测试扫描架系统的设计与实现[J].宇航计测技术,2017,37(5):1-9.
[5]马永光,杨金涛,何鑫,等.紧缩场静区平面波相位特征高精度测量[C].2015年全国天线年会论文集(下册):1067-1070.
[6]焦洪杰,陈五一,王春洁.大型紧缩场测试扫描架误差分析探讨.北京工商大学学报(自然科学版),2006.11(24):18-21.
[7]田崇兴,李锡文,胡照.基于PMAC的模糊自整定PID算法的研究[J].机械与电子,2010(10):60-63.
[8]赵保亚.基于PMAC的数控系统PID参数调节研究[J].机械设计与制造,2007.10(10):146-148.
