多机器人领航-跟随型编队控制
2018-05-09师五喜王栋伟李宝全
师五喜,王栋伟,李宝全
(天津工业大学电气工程与自动化学院,天津 300387)
在实际工程应用中,由于单个智能体自身能力的局限性,在处理复杂任务或处于复杂环境下仅靠个体行为往往无法解决.人们受到自然界中鱼群、鸟群等生物种群协作完成捕食、迁移等生物集群协作行为的启发,将这种生物集群编队协作的特点运用到多智能体系统中.目前,编队运动问题已在很多领域得到应用,例如在工业领域,人们控制多个移动机器人以特定队形搬运大的物体;在军事上,多个自主式小车被用于编队巡逻或侦察;在警务领域,人们控制多个移动机器人组成弧形包围或捕获入侵者等.
多机器人编队控制是目前国内外研究的热门课题之一.多移动机器人的编队运动,要求多个移动机器人作为一个编队同时运动到目标区域,并在运动过程中始终保持给定队形,同时能安全地避开可能出现的障碍物.这种群体行为控制是解决许多机器人协作问题的基础,它对实现多机器人在分布式空间环境中协同执行任务具有重要意义.编队控制方法有领航-跟随(leader-follower)法[1-5]、虚拟结构(virtual structure)法[6]、基于行为(behavior-based)的方法[7]、人工势场法[8]等.文献[1]提出了适用于2个机器人的距离-方位-方向控制方法和适用于3个机器人的距离-距离-方向控制方法.文献[2]用自适应控制方法,研究了有两个领导者,其余均为跟随者的编队控制方法.文献[3]提出了一种新的针对领航-跟随系统的运动学模型,该模型基于笛卡尔坐标.文献[4]针对车式移动机器人设计了一种领航跟随型编队控制算法.文献[5]通过设计模糊控制器,采用领航-跟随法实现了多机器人的编队控制.文献[6]结合人工势场和虚拟结构法,提出了一种针对多AUV的编队控制算法.文献[7]提出了一种基于行为法的机器人编队控制方法.文献[8]所采用的基于行为的方法可实现分布式控制,但此方法使队形控制的稳定性较差.文献[9]提出了一种基于行为法和领航-跟随法相结合的混合式编队算法,实现了对机器人的编队控制.文献[10]提出了一种基于滑模控制的机器人编队算法.文献[11]综合虚拟结构法和基于行为的方法,提出了一种带队形反馈的分布式编队控制算法.文献[12]设计了一套基于机器人动力学模型的编队控制算法.
以上算法虽然实现了编队控制的目的,但在编队运动过程中,对机器人速度和加速度大小没有限制.而在实际应用中,机器人本身对速度和加速度的大小有一定的限制,当速度和加速度大小超过机器人的截断速度时,机器人只会以自己允许的最大速度运行,这样在编队运动过程中,跟随机器人便不能准确地跟随领航者机器人,完成编队任务.文献[13]设计了一种具有速度与加速度限制的轨迹跟踪控制算法,该算法通过在原轨迹跟踪算法的基础上,增加了速度反馈,从而保证了机器人输入速度和加速度的有界性,但是该算法只是在单个机器人上实现了速度与加速度的限制,在机器人编队控制系统中,不仅仅要考虑到对领航者机器人的速度和加速度限制,而且对于跟随者机器人的速度和加速度大小也需要考虑在内.本文在文献[13]的基础上提出了具有速度和加速度限制的编队控制算法.通过引入2个一阶滤波器作为编队控制器的反馈信号,使得机器人的输入速度和加速度大小均有界.由于该反馈信号及其时间导数的大小完全受限于2个滤波器参数,因此可以通过调整2个滤波器参数的大小来调整机器人输入速度和加速度的大小.文中通过李雅普诺夫理论证明了闭环系统的稳定性,且通过仿真和在3个轮式移动机器人组成的编队平台上验证了本文方法的有效性.
1 机器人模型及问题描述
采用3个轮式移动机器人为研究对象,其中1个为领航者,另外2个为跟随者.对于领航者的移动机器人,其运动学模型只根据自身的位姿信息确定,而对于作为跟随者的移动机器人,其运动学模型建立在与领航者的位姿信息基础之上,通过与领航者的相对位置和角度信息来间接描述其自身的位姿信息.
1.1 领航者运动学模型
领航者机器人模型如图1所示.

图1 领航者机器人模型Fig.1 Leader robot model
假设领航者机器人在世界坐标系中的位姿为(x,y,θ),其中:(x,y)为领航者机器人的位置坐标;θ为机器人在世界坐标系中的方向角;v(t)与w(t)分别为机器人的线速度与角速度,则机器人的运动学模型为:

1.2 跟随者运动学模型
为了描述多机器人系统中各个机器人在队形结构中的位置,以2个机器人为例来说明本文所采用的领航-跟随者队形结构的几何模型.假设任意的跟随者机器人RF,其跟随的领航者机器人为RL,则本文采用的领航-跟随者队形结构模型如图2所示.

图2 领航-跟随者队形结构模型Fig.2 Pilot follower formation structure model
图2中,领航者机器人的线速度用vL来表示,角速度用wL来表示,线速度与水平方向的夹角用θL来表示.跟随者机器人的线速度用vF来表示,角速度用wF来表示,线速度与水平方向的夹角用θF来表示.以机器人两轮轴心连线的中点为参考点,则2个机器人参考点之间的距离为λL-F,领航者机器人前进方向与2个机器人参考点连线的夹角为φL-F.
对于一个领航-跟随编队系统,编队的主轨迹通常由领航者机器人决定,跟随机器人的参考轨迹由领航机器人生成的虚拟机器人轨迹决定[4].假设跟随者机器人与领航者机器人最终达到的距离与角度分别为和,那么虚拟机器人与领航者机器人之间的距离和角度分别为和.在世界坐标系X-Y中,虚拟机器人与领航者之间的位置关系为:
跟随者与领航者之间的位置关系为:

虚拟机器人与跟随者之间的表达式为:

通过转移矩阵,将其转换到跟随者机器人RF自身的坐标系xF-yF下的误差表达式为:

将式(3)和式(4)带入到式(5)中可得
对式(6)两边求导可得[12]:
至此,机器人编队控制问题转化为跟随机器人RF对虚拟机器人RV的轨迹跟踪问题,即寻找合适的控制律(vFωF)使得式(7)描述的闭环系统渐近稳定,且

式中:vc、wc、av、aw均为正的常量.
2 控制器设计
文献[13]通过在原轨迹跟踪算法的基础上,添加了2个一阶滤波器,作为输入速度的反馈信号,从而使得机器人的输入速度和加速度有界,且其界限可以通过调整滤波器参数来调整.本文通过借鉴文献[13]的设计方法,通过对机器人编队控制算法进行调整,设计控制器如下:
其中k为正反馈参数,
并且φ1和φ2分别为一阶滤波器产生的反馈函数:

其中α1和α2均为正滤波参数,且φ1(0)=φ2(0)=0.注1:与文献[13]所设计的针对单个机器人的轨迹跟踪算法相比,上述控制器引入了2个附加项γvF和γwF.对于基于运动学的多机器人编队控制算法,这2个附加项的引入保证了编队控制算法的稳定性.
定理1对于式(7)描述误差动态系统,设计控制律如式(9)和(10),自适应律采用式(13),则当 t→∞时,ex,ey,eθ均收敛于 0,并且控制律(vFωF)满足式(8).
为证明以上定理,本文引入如下引理:
引理1[13]:如果一个有界的标量函数z(t)满足当t→∞ 时,z→0并且,其中 (ft)是有界的并且一致连续的,那么当t→∞时,并且f(t)→0.
证明:选取李雅普诺夫函数为:
由式(7)、(9)、(10)、(11)、(13)可得


将式(12)代入式(15)可得:

由式(7)和式(10)可得

所以当ey≥ 0,

当ey< 0,

同理可得,当 t→∞,ey→0.
当 t→∞ 时,sin eθ→0,cos eθ可能收敛于 1 或者-1.由于 V(t)是非增的,假设 t→∞ 时,cos eθ→-1,则V(∞)→2/k.由于cos eθ(0)≠-1.所以当k取足够小时,总能满足 V(0)< 2/k,即 V(0)< V(∞).这与 V(t)是非增的矛盾.因此当t→∞时,cos eθ→1.综上所述,当 t→∞ 时,ex,ey,eθ将收敛于 0.
下面先证明机器人输入速度和加速度的有界性.
由式(13)可知

由式(13)、式(19)、式(20)可知:
所以φ1和φ2是有界并且一致连续的.
由式(9)和式(19)可得
由式(10)和式(20)可得

由式(9)得

由(17)得
将式(25)代入到式(24)中得
由式(10)得
当ey≠ 0时,式(27)可以写为:

由于
其中由式(8)和式(23)可得

将式(29)代入式(28)可得

当ey=0时

综上所述
所以控制律(vFωF)满足式(8).
3 仿真与实验
3.1 仿真
仿真中以3个机器人组成三角阵型队列为例进行验证,根据领航者走出的2种不同轨迹,分别进行了仿真,并且在仿真实验1中进行了速度与加速度有界性验证.仿真实验中,设定
vc=0.65 m/s,wc=1.2 r/s
ac=1.12 m/s2,aw=0.71 r/s2
2个跟随机器人与领航机器人最终达到的距离和角度分别为
仿真1:3个机器人从初始位置先完成三角阵型编队,然后保持编队做椭圆形运动.设领航者机器人的速度为(vL,wL)=(0.1,0.1),通过式(22)、(23)、(26)、(32)可以算得 α1=0.45,α2=0.5,k=3.0.3 个机器人的运动轨迹如图3所示,图3中跟随者1的运动轨迹为绿色虚线,跟随者2的运动轨迹为蓝色虚线.
图4所示为跟随者2的线速度、角速度、线加速度和角加速度.
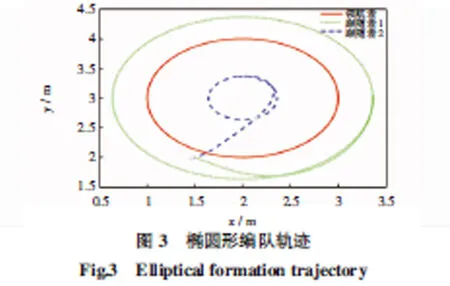

图4 跟随者2的速度和加速度Fig.4 Speed and acceleration of follower 2
由图4可知,其速度和加速度大小小于设定的速度与加速度上限.
仿真2:3个机器人从初始位置先完成三角阵型编队,然后保持编队做直线运动.设领航者机器人的速度为(vL,wL)=(0.1,0),根据式(22)、式(23)、式(26)、式(32)选定参数 α1=0.55,α2=0.1,k=1.0,运动轨迹如图5所示.
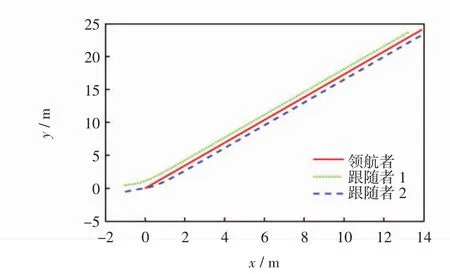
图5 直线形编队轨迹Fig.5 Linear formation trajectory
3.2 实验
以3个机器人组成三角形编队为例,根据领航者机器人运行的轨迹不同,进行了2次验证.
本文的实验平台为3辆小型轮式移动机器人,如图6所示.
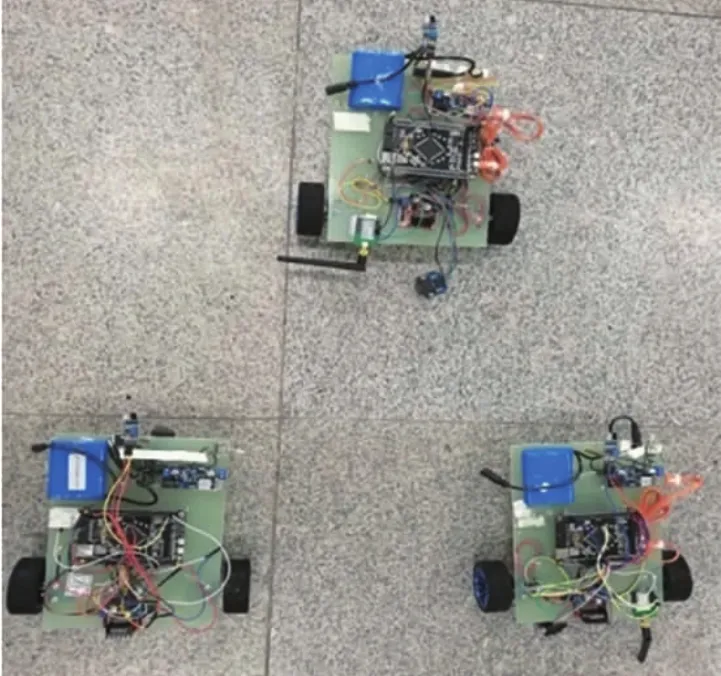
图6 实验平台Fig.6 Experiment platform
小车以stm32f103zet6为处理器,2个直流电机为驱动轮,用1个万向轮来保持小车的平衡,3辆小车通过Zigbee模块实现通信,使得跟随者机器人能够实时的获得领航者的位姿信息,从而实现实时跟踪.
对于小车的电机控制,一方面实验要求能够精确的测出小车的运行速度.因此,需要通过编码器测出电机的转速.另一方面,电机要能够精确的实现给定的速度值,因此,小车的电机控制部分采用双闭环PID调速控制.
本次实验需要领航者将位姿信息实时地传递给2个跟随者,因此需要采用通信模块.通信采用Zigbee透传功能,设定领航者的Zigbee模块为协调器,跟随者的Zigbee模块为路由器,协调器只负责发送信息,路由器只负责接受协调器发送的信息,因此,2个跟随者只能接收领航者发送的信息,并且相互之间没有影响.使得跟随者能够准确地,实时地接收领航者的位姿信息.
实验1:3个机器人从初始位置先完成三角阵型编队,然后保持编队做椭圆形运动.设领航者机器人的运行速度,初始位姿以及与跟随者之间期望的位姿都跟仿真1相同.通过串口采集机器人的运动数据,则3个编队机器人的运行轨迹如图7所示.最后,2个跟随者机器人与领航者机器人组成三角阵型,并且保持三角阵型做椭圆形运动.

图7 组成三角阵型并且走出椭圆形轨迹Fig.7 Triangle formation and elliptical trajectory
实验2:3个机器人从初始位置先完成三角阵型编队,然后保持编队做直线运动.设领航者机器人的运动速度,初始位姿以及与跟随者之间的期望的位姿与仿真2相同.则3个机器人的运行轨迹如图8所示,3个机器人组成三角阵型并且走出直线轨迹.

图8 组成三角阵型并且走出直线轨迹Fig.8 Triangle formation and straight trajectory
4 结论
本文提出了一种具有速度和加速度限制的编队控制算法,通过加入2个一阶滤波器,在编队运动控制器的基础上加入了有界的反馈信号.研究结果表明:
(1)通过设定滤波器参数α1,α2的大小,可以设定编队机器人运行速度和加速度的最大值vm和am.
(2)文中证明了闭环系统的稳定性,仿真和实验结果也表明了.编队机器人可以稳定的组成设定的队形并且保持队形运动,且其运行速度和加速度均在设定的范围内,即当 t→∞ 时,位姿误差 ex,ey,eθ将收敛于0.且v< vm,a< am.
实验中以3个机器人组成的编队系统为研究对象,而实际应用中,经常需要更多的机器人来完成编队.本文研究成果不仅可以应用于3个机器人组成的编队系统,对于更多机器人组成的编队系统也同样适用.
参考文献:
[1]CHEN J,SUN D,YANG J,et al.Leader-follower formation control of multiple non-holomoic mobile robots incorporating a receding-horizon scheme[J].International Journal of Robotics Research,2010,29(6):727-747.
[2]GUO J,LIN Z,CAO M,et al.Adaptive leader-follower formationcontrolforautonomousmobilerobots[C]//Baltimore,MD,USA:AmericanControlConference.IEEEXplore,2010:6822-6827.
[3]LI X,XIAO J,CAI Z.Backstepping based multiple mobile robots formation control[C]//Edmonton,Alta,Canada:IEEE/RSJ International Conference on Intelligent Robots and Systems.IEEEXplore,2005:887-892.
[4]王保防,张瑞雷,李胜,等.基于轨迹跟踪车式移动机器人编队控制[J].控制与决策,2015(1):176-180.
WANG B F,ZHANG R L,LI S,et al.Formation control of vehicle based mobile robot based on trajectory tracking[J].Control and Decision,2015(1):176-180(in Chinese).
[5]吴垠,刘忠信,陈增强,等.一种基于模糊方法的领导-跟随型多机器人编队控制[J].智能系统学报,2015(4):533-540.
WU Y,LIU Z X,CHEN Z Q,et al.A leader follower multi robot formation control method based on fuzzy method[J].Journal of Intelligent Systems,2015(4):533-540(in Chinese).
[6]潘无为,姜大鹏,庞永杰,等.人工势场和虚拟结构相结合的多水下机器人编队控制[J].兵工学报,2017,38(2):326-334.
PANG W W,JIANG D P,PANG Y J,et al.Formation control of multi underwater robots based on combination of artificial potential field and virtual structure[J].Acta Armamentarii,2017,38(2):326-334(in Chinese).
[7]BALCH T,ARKIN R C.Behavior-based formation control for multirobot teams[J].IEEE Transactions on Robotics&Automation,1999,14(6):926-939.
[8]YUAN J,TANG G Y.Formation control for mobile multiple robots based on hierarchical virtual structures[C]//IEEE International Conference on Control and Automation.Xiamen:IEEEXplore,2010:393-398.
[9]张捍东,黄鹂,岑豫皖.改进的多移动机器人混合编队方法[J].计算机应用,2012,32(7):1955-1957.ZHANG H D,HUANG L,CEN Y W.Improved hybrid formation method for multiple mobile robots[J].Computer Applications,2012,32(7):1955-1957(in Chinese).
[10]SANCHEZ J,FIERRO R.Sliding mode control for robot formations[C]//IEEE International Symposium on Intelligent Control.Houston:IEEE,2003:438-443.
[11]REN W,BEARD R.Decentralized scheme for spacecraft formation flying via the virtual structure approach[J].Journal of Guidance Control&Dynamics,2012,2(1):1746-1751.
[12]DIERKS T,JAGANNATHAN S.Control of nonholonomic mobile robot formations:Backstepping kinematics into dynamics[C]//IEEE International Conference on Control Applications.Singapore:IEEE,2007:94-99.
[13]CHEN X,JIA Y,MATSUNO F.Tracking control of nonholonomic mobile robots with velocity and acceleration constraints[C]//AmericanControlConference.Portland:IEEE,2014:880-884.
[14]朱大奇,杜青.基于领航位置信息的AUV三维编队控制方法[J].系统仿真技术,2013,9(3):193-198.ZHU D Q,DU Q.Three dimensional formation control method of AUV based on navigation position information [J].System Simulation Technology,2013,9(3):193-198(in Chinese).
[15]DIERKS T,JAGANNATHAN S.Control of nonholonomic mobile robot formations:Backstepping kinematics into dynamics[C]//IEEE International Conference on Control Applications.Singapore:IEEE,2007:94-99.
[16]王中林,刘忠信,陈增强,等.一种多智能体领航跟随编队新型控制器的设计[J].智能系统学报,2014(3):298-306.WANG Z L,LIU Z X,CHEN Z Q,et al.Design of a new multi-agent navigation following formation controller[J].Journal of Intelligent Systems,2014(3):298-306(in Chinese).
