大扩展比车载医疗方舱自动支撑调平系统研制
2018-05-08孟晓东郑静晨李明赵辉闫翀杨林波徐冬
孟晓东,郑静晨,李明,赵辉,闫翀,杨林波,徐冬
1.武警总医院,北京 100039;2.南阳二机石油装备集团股份有限公司,河南 南阳 473006;3.南阳二机车辆制造有限公司,河南 南阳 473006
引言
十八大以来,我国对全民医疗保障体系提出了更高要求,为完善医疗下乡、医疗扶贫及台风、地震、海啸等突发重大自然灾害时快速医疗应急机制,以及越来越多的国际医疗救援服务,使我国灾害医学救援装备技术面临诸多挑战[1-2],梳理制约现阶段我国重大灾害现场救援移动医院运行与发展,而国内现有移动式医院装备研究主要以集成创新和引进创新为主,整体结构与功能处于世界技术发达国家中流水平[3],自主创新和原始创造能力亟待提高,代表世界前沿技术的标志性装备亟待研发。该项目主要是针对我国灾害现场救援移动医院方面的瓶颈,研发大扩展比智能拓展车载方舱医院[4]。
针对国内外重大灾害救援现场大批量伤员面临医疗救治的问题,按照“第一时间把医院送到灾害一线”的理念和“灾害现场三级医疗救治体系”架构[5],将先进的医疗设备带到灾害现场,结合现代数字智能化技术、电气自动化控制技术,基于大扩展比智能拓展车载方舱对“空运投送、快速部署、快速展开”的使命要求[6],提出一种新型的自动支撑调平系统,保证整车具有超大扩展比,符合我国运20航空运输要求,满足车辆在高原、高寒、高湿热等复杂环境的使用[7]。
该研究突破传统液压仅有四点调平的局限和不足,不仅底盘四点调平控制是纯电动支腿控制器控制,还配备滑道电动展开、支腿调平控制,控制系统完全自动化、一体化,不仅使医疗方舱车的安全性、可靠性大大提升,保障各种精密医疗设备稳定运行,全自动一键调平更是简化了操作流程,扩展效率更高,大大提升了自动化效果,使得车载医疗方舱领域自动化调平迈向新的一步[8],电动能源的清洁减少环境污染,也给大扩展比智能拓展车载方舱今后的发展提供了更大的空间。
1 自动支撑调平系统原理介绍及构成
大扩展比车载医疗方舱自动支撑调平系统是新型的电动自动化支撑调平设计,所有支腿和滑道的伸缩都完全通过电气自动控制,每一级伸缩支腿都配备有小型电机,通过电机的工作螺旋上升或下降。大扩展比智能拓展车载方舱底盘及各级滑道最外端均配有倾角传感器[15],用于测量水平角度,同时反馈数据给控制器,帮助控制器调整支腿高低,达到整车和大扩展方舱的水平一致。
该系统主要包括3个部分:① 整车主支腿及滑道支腿扩展调平系统;② 车前后部舱体大扩展后支腿的调平系统;③ 信号指令支腿撤收系统。其中,车前后部舱体大扩展后支腿的调平系统是国内首创最新研究。自动支撑调平系统利用倾角反馈+模拟控制算法的找平模式;实现既可降低购置找平系统产品或专业开发所需成本,又可增加产品附加性能并对竞争对手形成技术优势的找平功能方案,达到一体化控制的目的。
2 自动支撑调平系统原理介绍及构成
2.1 整车主支腿及滑道支腿扩展调平系统
2.1.1 整车主支腿调平系统控制
首先,为了保证系统在不同环境,不同地面情况下主支腿调平的有效使用,需要在主支腿伸出时先进行虚腿调平。
虚腿调平通过压力传感器反馈,当压力反馈值大于设定参数时,系统得到反馈并对主支腿调平。需要说明的是,在不同的地面情况下运行本系统,系统得到着地信号后,地面情况就已经知道,以前调试得出的导轨的变形量和误差量不会发生变化,所以支腿走出相应的行程就可以适应不同地形。
整车主支腿调平采取的控制原理方法为“四点支撑追逐式调平”[9]。其原理是指当判断出现最高支腿后,该最高支腿不动,其余3个支腿同时上升,以最高支腿为准,先达到水平角允许范围一侧的支腿先停止升高,另一水平角达到允许范围后停止两支腿的上升[10]。
设主支腿未展开的前后中心轴为x轴,左右对称为y轴,支腿展开后,设各支腿坐标为A(x0,y0,z0)、B(x1,y1,z1)、C(x2,y2,z2)、D(x3,y3,z3),其中根据双轴倾斜传感器的检测结果,定义左右倾角α和前后倾角β均为正值的支腿坐标A点,然后按顺时针方向将各支腿坐标定义为B、C、D点。假设其中一个支腿底盘最高点为A,即以A固定,调整剩余B、C、D 3点,以达到最终水平一致。
利用公式假设A固定:若α>0,β>0,α↑,β↑
Bb=L1×tgα
Cc=Bb+L2×tgβ=Bb+Dd
Dd=L2×tgβ
其中,L1、L2、L3为AB、AC、AD距离,Bd、Cc、Dd为B、C、D根据A点支撑调整的垂直距离。
最终,通过倾角传感器将整车底盘调整为水平,最高精度可达到±0.5°[11]。
载荷主支腿选用的为电动支腿,与液压支腿有较大优势,调平过程快速平稳,精度高,拥有自锁性能,超大静载荷,能满足医疗综合处置车长时间放置的要求。主支腿调平所使用的倾角传感器需要安装在车辆大梁上,安装位置要求尽量靠近4个支腿的安装中心。倾角传感器配显示传感器,调平过程前中后可显示车辆倾角,安装位置,见图1。
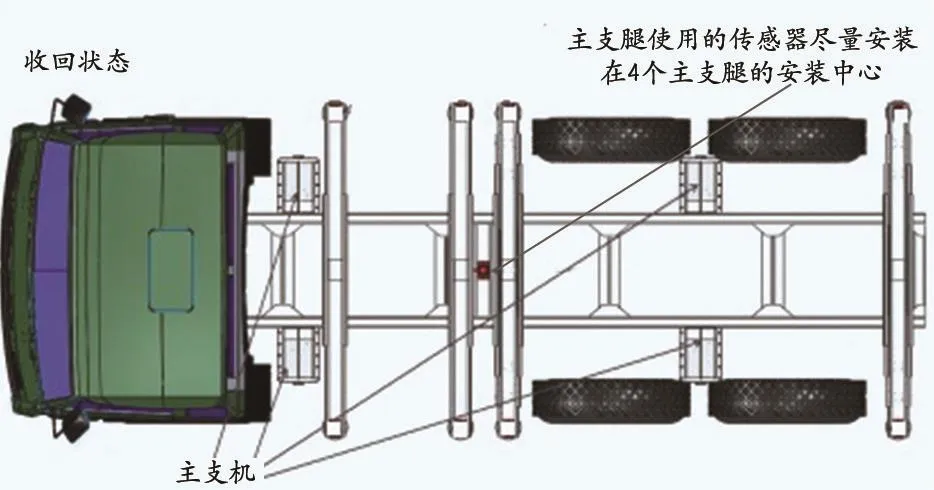
图1 主支腿安装位置和双轴倾角传感器安装位置
2.1.2 滑道支腿扩展调平控制系统
该控制系统独创了电动滑道支腿伸缩导轨的支腿调平。和以往只会将滑道支腿和底盘作为一个平面来单一调平作为区别[12],该系统更为复杂和智能,车载医疗方舱的前后部多级滑道支腿都可作为独立平面进行单独调平,最终系统将多个不同支腿平面与底盘平面调平一致。
大扩展比智能拓展车载方舱前舱左右滑道为单级滑道,支腿位于滑道外端部,共4个支腿,后舱左右为三级大扩容伸缩滑道,每个滑道上安装3个支腿,每级滑道支腿均配有电动支腿,倾角传感器都安在各级滑道最外侧。前后滑道支腿伸出设计图,见图2~3。
滑道伸出工作流程为:前舱和后舱一起工作作业,前舱左右滑道伸出完成后,电动支腿开始工作伸出,当支腿着地后,通过左右两端最外侧的倾角传感器同时进行与整车底盘的水平角度调节反馈,当左右两个支腿与底盘水平一致后,前舱一级滑道调平结束。前舱滑道支腿自动调平伸出流程,见图4。
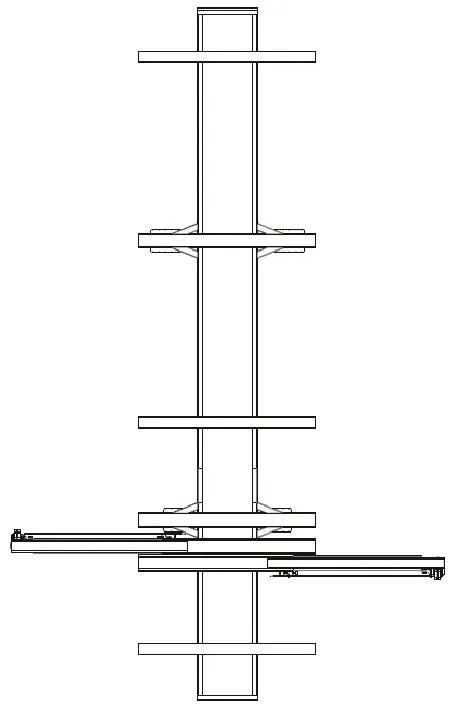
图2 前支腿滑道伸出设计图
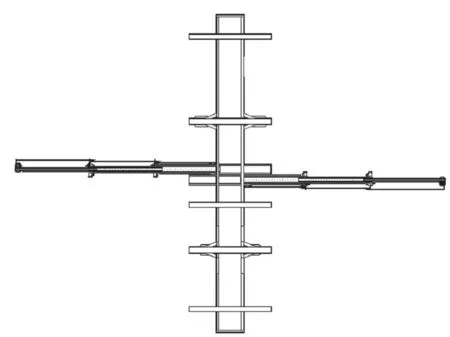
图3 后支腿滑道伸出设计图
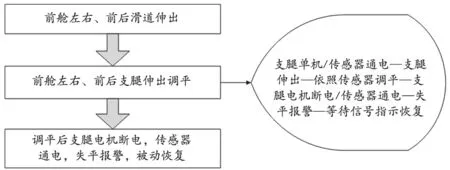
图4 前舱滑道支腿伸出自动调平图
同时,后舱三级滑道也在逐级调平,首先当一级滑道完全伸出后,一级支腿开始伸出并进行与车底盘进行水平调节。调节完毕后,再伸出二级轨道,同样二级支腿伸出完成后,与车底盘进行水平调节。调节完毕,再伸出三级轨道,三级支腿按照同样的方式进行调节。后舱滑道支腿的调平伸出流程,见图5。
车前后部左右大扩容导轨支腿伸出完毕最终效果,见图6。可以看到红色标注为8个倾角传感器各分布在前后左右支腿的最外端,传感器时刻保持通电状态,检测水平倾角变化,一旦达到失平状态,传感器反馈信号给系统报警,操作人员可根据接收的信息,通过信号指令调平相关支腿,以保证每一级的支腿水平平面与底盘平面保持一致。蓝色标注为道支腿电机,可以看到每级都有专门电机,各个电机工作不受影响,可以同时多点自动调平,使系统更智能化。
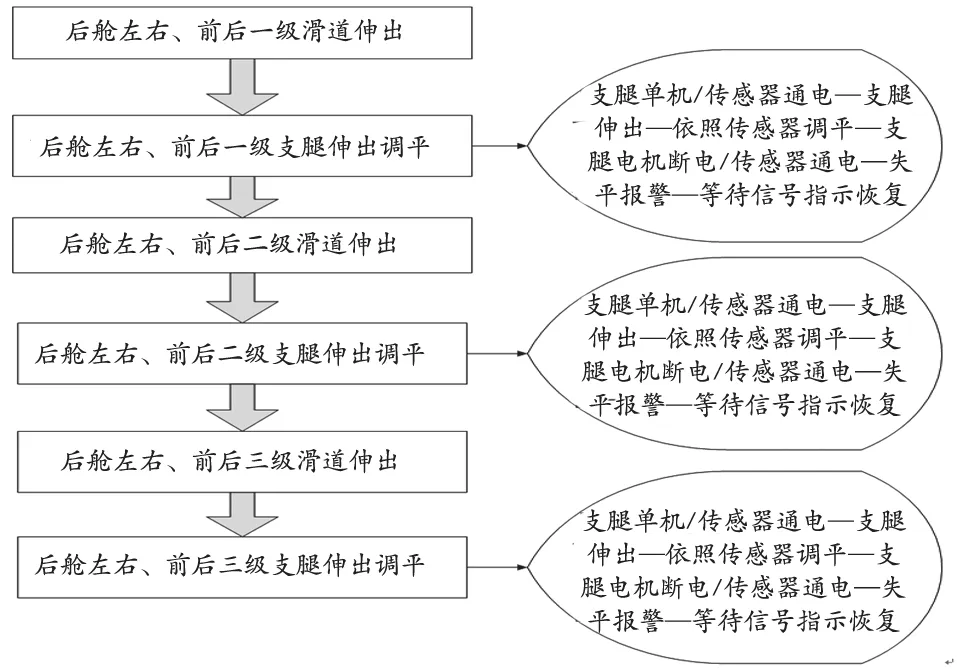
图5 后舱滑道支腿伸出自动调平图

图6 车前后部左右大扩容导轨支腿伸出效果图
2.2 车前后部舱体大扩展后支腿的调平系统
当左右前后舱体扩展开后,舱体因重力作用,主支腿和各级滑道支腿肯定会有不同程度的倾角水平偏移,系统通过倾角传感器反馈的数据对主支腿和滑道支腿进行判断,并逐级进行对其进行调整,调整顺序为:主支腿调平—前后一级支腿调平—后二级支腿调平—后三级支腿调平。系统可根据实际情况进行判断,当传感器反馈数据在水平位后,系统自动停止调平,无需做完所有步骤。舱体大扩展后支腿调平流程,见图7。
2.3 信号指令支腿撤收系统
滑道缩回工作流程为:前舱左右支腿收回,前舱一级滑道收回。同时段,后舱左右第三级支腿收回后,后舱第三级开始滑道收回,然后后舱左右二级支腿收回,后舱二级级滑道收回,最后,后舱左右一级支腿收回,后舱一级级滑道收回完毕。信号指令支腿撤收流程,见图8。
3 大扩展比车载医疗方舱自动支撑调平系统应用实现
该系统已成功应用于在车载医疗方舱设备上,并取得的非常好的显著效果。全车配备车载控制器箱,可以通过按钮开关进行主支腿调平和大扩展滑道支腿调平。并且,方舱自动支撑调平系统可与方舱多级扩展系统进行一体化的集成控制,通过无线遥控功能,实现整车一键式支撑、调平、扩展等功能。另外,全车还自带应急发电机组及光伏发电设备,能在网电出现故障时,进行应急反应,作为临时供电电源使用,保护医疗设备和医疗手术不间断进行。
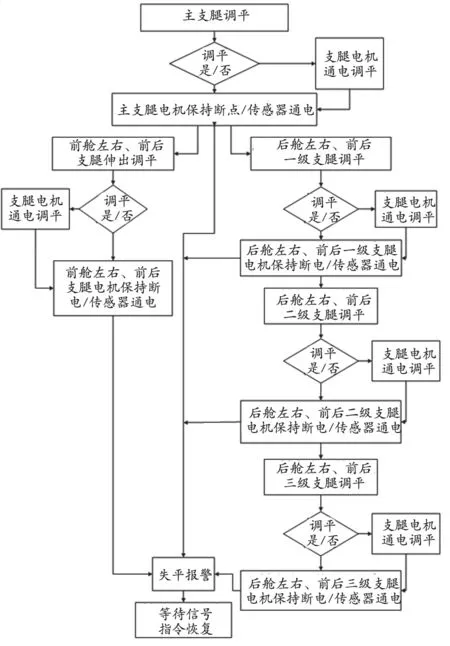
图7 舱体大扩展后支腿调平流程图
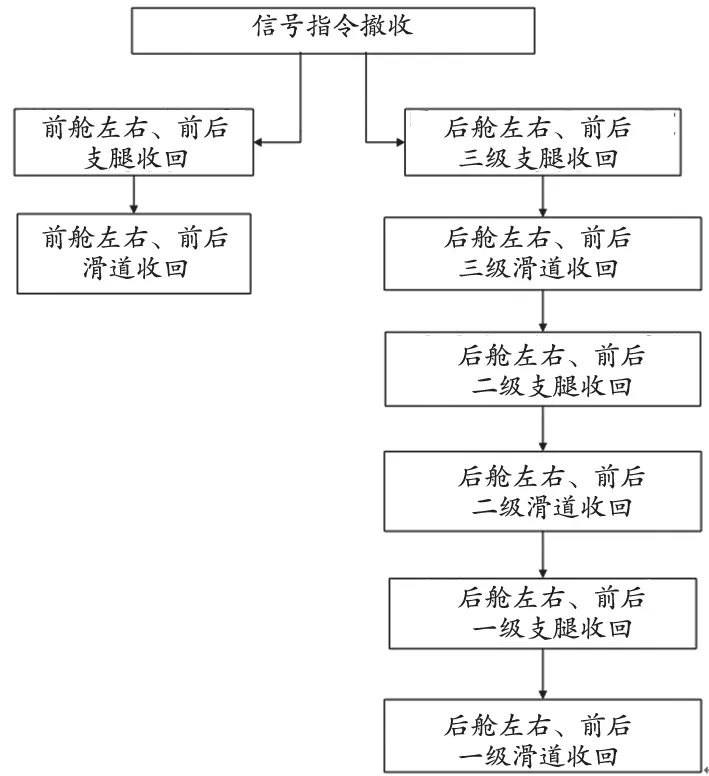
图8 信号指令支腿撤收系统流程图
系统主要控制元件部分安装在两件标准4 U机箱,分别控制调平主支腿和滑道支腿,其中还包含主支腿一键调平和滑道支腿一键调平,充分实现电控自动化作用。控制操作集成在控制触摸屏上,操作人员通过触摸屏上进行自动支撑调平的控制。
4 总结
大扩展比车载医疗方舱自动支撑调平系统是纯电控支腿调平系统,首次应用在大扩展比车载医疗方舱车上,该系统集成了整车调平、滑道扩展、滑道调平等功能[13],还具有虚腿监测及消除技术。相对国内其他液压支腿调平,电动支腿调平更智能化,能精准反应实时工况,及时调整支腿,使车辆始终保持水平角度;同时电控调平更加符合我国工业设备清洁化的环保要求,不会出现漏油泄油事故造成环境污染[14]。而针对大扩展比车载医疗房舱自动支撑调平系统的成功应用,也给车载方舱设计提供了更多的技术选择方案,该研制应用的成功,也加强了车载医疗方舱在复杂恶劣的环境下适应性和安全可靠性[15-16]。
[参考文献]
[1] 刘磊汉,王村河,王苓,等.以第二代医疗方舱为依托的野战医院快速展开[J].解放军医院管理杂志,2008,6(6):525.
[2] 孟晓东,郑静晨,王藩,等.武警智能拓展车载方舱医院的研制[J].医疗卫生装备,2015,36(10):27-29.
[3] 王世明.装备产品集成创新的模式及选择研究[D].大连:大连理工大学,2010.
[4] 孟晓东,王藩,李晓雪,等.一种急救设备一体箱的设计和应用[J].中国医疗设备,2015,30(1):95-96.
[5] 高艳红,林牡丹,李晓雪,等.车载式灾害救援医院的护理组织管理[J].护理研究,2014,(28):3554-3555.
[6] 谭树林,刘亚军,孙景工,等.应急医学救援方舱医院装备研究进展[J].医疗卫生装备,2011,32(9):78-79.
[7] 厉建西,宋晓伟,张跃军.高原高寒地区车辆装备保障面临的困难及对策[J].汽车运用,2017,(2):25-26.
[8] 王燕,王凯,王旭辉,等.方舱四点液压自动调平技术研究[J].方舱与地面设备,2007,(4):6-10.
[9] 晁勇,帅万钧,李安民,等.野外机动应用的车载CT方舱研究[J].中国医疗设备,2014,29(4):27-29.
[10] 孙利生.一种大跨距四点支撑液压自动调平系统[J].液压与气动,2004,(7).
[11] 帅万钧.苏卫华.刘帅.等.车载CT方舱整装质心位置及轴荷分配的计算[J].中国医疗设备,2014,29(6):25-27.
[12] 甘志梅,寇桂岳.基于PLC的车载平台液压自动调平系统设计[J].南昌工程学院学报,2012,31(4):38-40.
[13] 王雪丽,医疗方舱车结构设计概述[J].专用汽车,2014,(5):96-99.
[14] 杨侃.自动调平装置中的控制系统设计[J].方舱与地面设备,2004,(2):23-25.
[15] 刘庆修.车载钻机底盘自动调平系统研究[J].煤矿机械,2014,35(11):70-72.
[16] 郑静晨,王藩,任伟,等.一种智能扩展方舱医院:中国,CN20-1310177031.X[P].2013-09-18.
