基于接触表面的工件自由度判断定理及应用
2018-05-07余凤燕
余凤燕
(茂名职业技术学院,广东 茂名 525000)
夹具设计中首要任务就是将工件精确定位:在定位过程中,根据工序加工要求设计出定位方案,从而合理地约束工件自由度。其次在自由度没有受到约束的方向上,工件也只能在规定的范围内变动。因此,分析工件的自由度约束情况是判断定位方案设计是否正确的关键所在。基于工件与夹具元件接触元素与工件约束情况的内在联系,本文建立了定位原理的几何模型,可以快速分析工件自由度的约束情况。从而使得传统的定位原理从定性描述上升为几何要素的表示,为计算机辅助夹具设计系统的开发和为实现在软件系统环境下夹具约束工件自由度分析系统的二次开发提供了基础理论。
1 工件被限制自由度的判断规律与分析
工件与夹具元件接触表面可分为3大类:点、线、面。其中线又细分为直线和封闭曲线,面细分为平面和封闭曲面。经过分析,不难发现一个规律:
(1)当接触表面为点时,工件被限制的自由度为:一个移动自由度;
(2)当接触表面为直线时,工件被限制的自由度为:一个移动自由度和一个旋转自由度;
(3)当接触表面为曲线时,工件被限制的自由度为:两个移动自由度;
(4)当接触表面为平面时,工件被限制的自由度为:一个移动自由度和两个旋转自由度;
(5)当接触表面为曲面时,工件被限制的自由度为:两个移动自由度和两个旋转自由度。而且这些被限制的自由度的方向都有一个规律:被限制的移动自由度的方向和接触表面(工件与定位元件接触的表面)的法向方向一致。而被限制的旋转自由度的轴方向则刚好相反,与接触表面(工件与定位元件接触的表面)的法向方向(或法向方向的分解方向)一定不一致。
总结以上规律如表1所列。
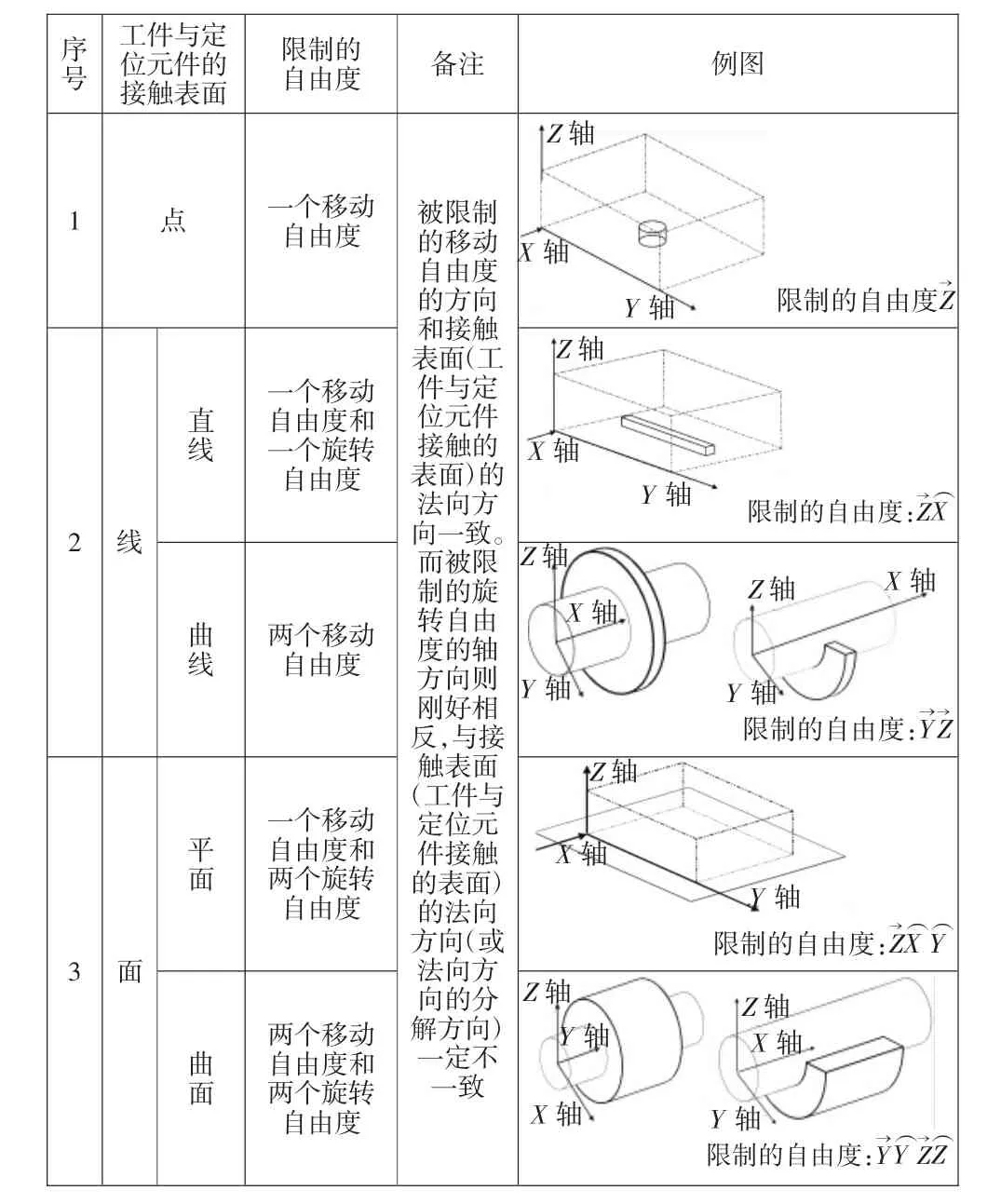
表1 根据接触表面限制自由度的规律
2 工件被限制自由度的判断步骤与流程图
工件被限制自由度的判断步骤:
(1)扫描定位元件与工件接触的表面;
(2)找出接触表面的法向方向;
(3)根据定位元件与工件接触的表面,同时遵循方向判断规律,最后得出工件被限制的自由度;
(4)结束。
工件被限制自由度的判断的流程图如图1所示。
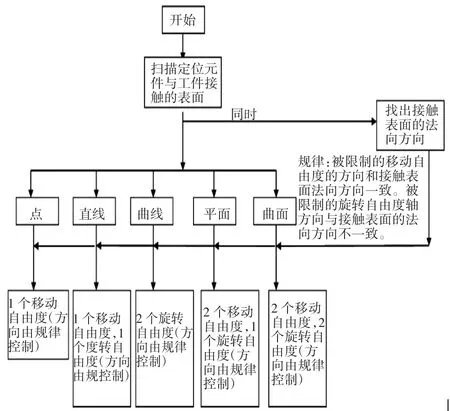
图1 工件被限制自由度的判断的流程图
3 应用实例
实例1:工件用宽V型块定位,如图2所示。

图2 宽V型块定位
实例判断步骤:
(1)扫描定位元件与工件接触的表面,接触表面为两条直线(如图3所示);
(2)找出接触表面的法向方向,并分解成两个矢量方向,如图4所示;

图3 工件与定位元件的接触表面为两直线
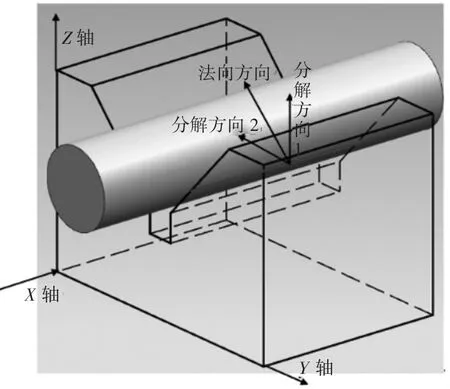
图4 工件被限制自由度的判断的流程图
(3)根据定位元件与工件接触的表面,同时遵循方向判断规律,由接触表面直线1得出工件被限制的自由度为,由接触表面直线1得出工件被限制的自由度为,最后得出工件被限制的自由度为;
(4)结束。
4 结束语
工件在夹具中的自由度主要取决于工件与定位元件的接触表面。本文根据工件与定位元件的接触表面元素建立了定位原理的几何模型,可以快速分析工件自由度的约束情况。从而使得传统的定位原理从定性描述上升为几何要素的表示,用接触表面元素定理容易处理工件自由度分析,可有效避免欠定位与过定位。用接触表面元素判定原理分析判断工件自由度更具理性且简单直观,适合计算机辅助判断工件的自由度,为计算机辅助夹具设计系统的开发、为实现在软件系统环境下夹具约束工件自由度分析系统的二次开发提供了重要理论依据。
参考文献:
[1]吴玉光.基于工序要求的夹具定位方案自动规划方法[J].机械工程学报,2010,46(11):185-192.
[2]秦国华,洪连环,吴铁军.基于齐次线性方程组的工件自由度分析技术[J].计算机集成制造系统,2008,14(3):466-469.
[3]梁 刚,程洪涛,聂陶荪,等.一种工件定位时自由度分析的新方法[J].机械工程与自动化,2009(5):168-169.
