基于一种新型自动换底线装置的电脑刺绣研究
2018-05-07曾颖谢国波邓华军
曾颖,谢国波,邓华军
(广东工业大学计算机学院,广州 510006)
0 引言
随着工业电脑刺绣机迅速的发展,劳工密集的生产模式得到了一定程度的改善,但是国内劳动力成本不断的提高,无论服装企业还是绣花等其它加工厂,都对电脑刺绣机生产效率提出了更为严格的要求。然而,随着机器转速的不断提高,会使绣花针的冲击力增大,刺绣机振动和噪声也随之迅速扩大。由于传统的多头刺绣机机头和线架均固定在刺绣机的横梁主轴上,又因为多机头的电脑刺绣机的机头针杆机构和凸轮挑线机构存在偏心质量,引起机头横梁弯曲振动加剧而产生共振,导致噪音高,不仅严重影响刺绣线迹的质量和刺绣机的生产效率,而且大大缩短刺绣机本身的使用寿命[1]。近年来,为了降低横梁振动的位移幅值,很多研究学者都以降低刺绣振动为目标,将横梁主轴作为研究对象,运用实验测试和有限元模拟方法开展电脑刺绣机横梁减振实验研究[2]。通过改变横梁的两端固定方式,使横梁振动的固有频率达到合理的值。还有部分学者进行了刺绣机刺布机构结构优化设计的研究,主要考虑以减少刺绣机刺布机构的振动出发点,对其结构进行优化,以运动学仿真软件ADAMS为基础,建立刺绣机刺布机构的参数化模型[3]。除了机械结构改造,还有关于工业刺绣机控制技术方面的研究,利用软件算法提升刺绣的效率。本文立足于提高电脑刺绣机的生产效率,选择合适的直线电机和驱动控制系统,配以合理的刺绣机机械设计结构,在不提高机器转速的作业情况下,把换底线这一耗费时间的操作进行了自动化、智能化。
1 主要研究内容
1.1 抓取底线旋梭的多自由度机械爪设计,以及相关的夹持、移动等装置的设计
为了提高工业电脑刺绣机的自动化水平和生产率,基于传统和现有刺绣机的机械特点,设计出一种能够自动抓取底线旋梭并更换为新旋梭的自动换底线机械装置。刺绣机原有旋梭的抓取,将会采用多自由度机械爪来完成;多个新旋梭会存放在一个夹持机构中,并能够及时自动旋转;当原有旋梭被取下后,将由一个传动机构负责将缠满底线的新旋梭安装到位。因此整个自动换底线装置包括传动结构、抓取机构、夹持机构等。
1.2 基于直线步进电机的自动换底线装置控制算法设计
实现高速、精确的抓取旋梭动作,对机械爪的移动、定位精度要求非常高,为了保证此动作的顺利完成,既需要保证各机械零件的精密配合,也要从控制的角度提高稳定性。本文充分利用直线步进电机高速、高精度的特点,在直线电机驱动以及运动控制算法上加以优化,并对机械爪位置、旋梭感应等多个传感器进行数据融合,保证换取底线整个过程的安全性和稳定性。
1.3 基于自动换底线系统的智能监控以及故障诊断和管理
针对工业电脑刺绣机节点多的特点,设计一种基于分布式控制的自动换底线监控软件。通过引入CAN总线技术,利用工业CAN总线的通信方式将各个节点与主系统的信息交互,监控系统会随时获取主控系统的数据和状态,利用计算机可靠的控制能力,对换底线操作进行智能监控,可以反映出该状态运行是否稳定,并对出现的各种状态、错误数据进行故障诊断分析处理,及时进行故障报警,并将现场实时故障数据准确写入数据库系统进行管理。
2 总体研发思路方案
本文研究致力于研制一种新型自动抓取并更换新底线装置,首次将直线步进电机应用在电脑刺绣机自动换底线装置中,实现高速、高精度的更换新底线,大幅提高电脑刺绣机的生产效率是本研究的最终目标。图1给出了本文研究整体研发思路的一个概要。
2.1 技术路线
(1)利用AIP、CAD等计算机辅助设计软件建立系统模型并进行仿真实验。主要针对高速运动进行模拟及动力学分析,包括运动曲线的路径规划、运动过程中各部件的受力分析、不同部位磨损和发热的情况等等。通过对上述数速度、加速度、反作用力等数据的分析,确定自动换底线的机械结构、材质、所需动力等。
(2)通过CNC设备进行样品制造并同时进行验证。充分利用自身优势等特点,使用CNC设备快速形成各机械部件的样品,并针对设计指标进行功能性的的试验验证与分析。
(3)疲劳、老化测试以及小批量用户测试。在功能设计完成之后,对其进行抗磨损、发热等的疲劳和老化测试,并小批量生产样机送往客户现场进行用户级测试,充分验证设计的可行性和可靠性。
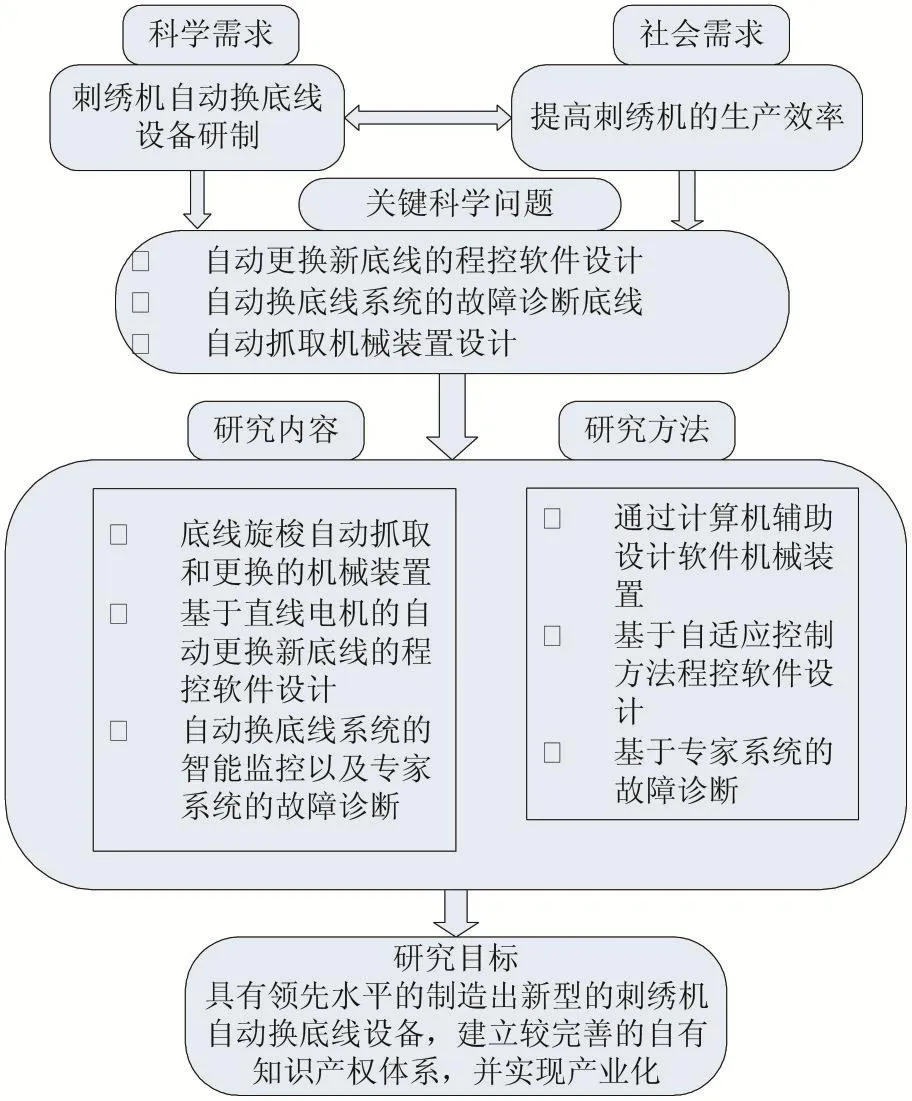
图1 整体研发思路概要流程图
2.2 多节点之间的通信
模糊控制作为一种新技术,在实际的生产实践中得到了大量的应用和发展。如今模糊控制在各个行业取得了长足的发展和令人瞩目的成就。解决了传统控制方法在工业生产等领域的难题,成为广大学者研究的热点。
模糊控制的本质就是用非精确的数学模型实现自适应控制,主要是从行为上模拟人们的思维方式,将人对控制系统的经验用自然语言表达出来,对人们控制的经验和知识进行加工分析,然后提炼总结出控制规则,从而建立一种能够被人们理解和接受,且适用于计算机处理的输入和输出模型[4]。从控制技术的角度来看,模糊控制实际上是一种非线性特征域控制器,不管被控对象是时变还是非时变系统,模糊控制都适用。体现出良好的适应性和鲁棒性、稳健性。此外,由于人工神经网络具有非线性适应信息处理能力,解决了传统人工智能方法在各领域的难题,逐渐成为人工智能领域兴起的研究热点。人工神经网络从信息处理角度将类似于大脑神经突触联接的结构进行抽象,从而建立数学模型,通过不同的连接方式组成不同的网络。
本文在传感器融合和数据通信方面,主要采用神经网络和模糊控制方法,为保证通信数据的完整性以及可靠性,采用工业CAN总线来实现多节点之间的通信。
2.3 电机驱动及运动控制算法
自适应控制是现代控制理论的一个重要组成部分,它作为一门研究课题至少已有60多年了。所谓自适应控制是指在周围环境存发生变化的情况下通过改变自身控制参数进行调整来保持良好工作性能的自动控制,无论外界环境发生多大变化或系统存在不确定性,控制系统能够对控制参数的自适应,使系统仍能按某一性能指标处于在最佳工作状态[5]。在电机驱动方面,本文采用自适应控制方案,实时辨识自动换底线装置当前的位置,使得系统的抓取动作不仅快速高效,而且精确可靠。
2.4 基于专家系统的自动换底线系统的智能监控以及故障诊断
所谓专家系统是一个在特定领域内具有专家水平解决问题能力的智能计算机程序系统。其核心部件是知识库,能够利用人类专家的知识处理现实世界中复杂的问题。它被广泛应用人工智能技术和计算机技术中,尤其在故障诊断领域,得到了高度的认可[6]。专家系统根据某领域一个或多个专家提供的知识和经验,模仿人类专家解决的思维过程和推理方式,然后进行推理和判断,解决现实世界中需要人类决策的复杂问题[7]。
通过提取并建立系统的专家知识库,知识库内包含系统故障原因、特征和后果,以及故障发生后的解决策略等专家知识,实现自动换底线系统的智能监控以及故障诊断,引入专家系统使得该套系统的设计方案能够方便地实现扩展和升级,同时也保证知识管理系统的可持续发展。
3 研究的创新之处
(1)本文研究首次将直线步进电机应用在电脑刺绣机高速、高精度自动换底线装置中。
(2)基于与直线步进电机相配合的底线旋梭自动抓取、传送、夹持等机械装置的设计。
(3)基于分布式控制的智能程控软件设计及算法优化。
4 结语
本文提出了一种新型电脑刺绣机的自动换底线设备装置,是基于直线步进电机的自动抓取装置,用以替代人手逐一地去更换底线而引致的停机时间,大幅提高了刺绣机生产效率和降低了刺绣机断线率,带动了电脑刺绣产业和相关产业链的发展和结构升级,同时也推动了技术的进步,具有良好的社会效益。
参考文献:
[1]林建龙,傅程,门桂香.电脑刺绣机横梁弯曲振动仿真分析[J].计算机仿真,2004,21(11):71-73.
[2]白皛,赵罘,林建龙,等.双机头刺绣机横梁的优化设计[J].噪声与振动控制,2010,30(3):71-73.
[3]刘良宝,王新,赵罘,等.电脑刺绣机刺布机构结构优化设计[J].纺织学报,2011,32(5):126-129.
[4]何德锋.分组网络化控制系统的建模、分析与设计[D].广东工业大学,2014.
[5]夏天俊.基于自适应神经网络的BDI预测研究[D].大连海事大学,2011.
[6]周利,余愚.机械故障诊断中人工智能的应用[J].可编程控制器与工厂自动化,2007(7):36-36.
[7]陈建胜.专家系统在岩土工程中的应用综述[J].工程地质计算机应用,2007,11(2):27-29.
