ATO模式下列车对标不准故障分析
2018-05-05刘涛,程婷
刘 涛,程 婷
目前地铁列车普遍采用ATO自动驾驶模式,保证列车平稳运行,通过对列车牵引/制动力的控制,来实现列车自动驾驶。车站站台均安装有屏蔽门系统,为了保证乘客顺利上下车,就需要列车在规定位置实现精准停车。若停车位置有偏差,将需要司机手动对标,影响列车准点运行。
2A4950车自运营以来,频繁出现对标不准问题,且故障固定表现为2A49端欠标、冲标。自2012年4月8以来该车正线出现对标不准故障102起,司机均需SM模式二次手动对标,造成多次晚点。
1 前期处理措施
车辆方面,该车先后更换过A车BCU速度传感器、奇数端的牵引电机速度传感器、2B49车的ECU、奇数端的称重阀、2B50车的模拟转换阀、2A49车和2C50车的4A14以及奇数端的DCU/M板和DCU/A板、两端的VTCU、两个A车闸瓦等,以及更改整列车制动软件版本等,信号方面,更换过ATO/ATP相关板件、机柜、测速仪、ATP天线等。以上措施均未解决冲标问题。
2 故障数据分析
通过分析车辆数据,列车运行状态平稳,如图1。

图1 2A50车故障数据
速度:下降平滑,在6 km时,司机快制制动,冲标2 m。
牵引参考值:最大为100%,快制时54%。
牵引和制动指令:正常。
车辆多次采集到故障发生时列车数据,进行对比分析。数据情况基本一致:列车运行曲线平滑,表明车辆牵引和制动系统工作运行状态均正常,未发现异常现象。
通过计算列车多次区间行走距离时,发现存在差异。在6月6日2A4950车以DTRO模式运行至广州东站折返线2道后不能动车,信号系统读取数据有紧制代码#35(ATO超速)。列车速度为7 km/h,目标距离已经到达143 m,且紧制仍会继续运行2 m左右,说明列车已冲标。
根据收集的数据,对比之前2A4950车3次折返行程距离的差异:
(1)6月6日该车广州东站-折返(冲标)合计总行程距离

(正常常用制动距离为:4.16 m,若不产生紧制常制距离为129.93 m+4.16 m=134.09 m,将达到273.3 m)。
(2)5月20日该车广州东站-正常折返合计总行程距离

(3)5月24日该车广州东站-正常折返合计总行程距离


表1 三次折返行程距离
从上述计算结果来看,在广州东站上行进折返线列车启动牵引惰性行程距离:在6月6日139.236 m比5月20日133.958 m多走了5.278 m,比5月24日137.43 m多走了1.8 m。
在广州东站上行进折返线列车制动行程距离:在6月6日129.93 m比5月20日136.32 m少走了6.4 m;若6 km时不发生紧急制动,正常常用制动可走4.16 m共走134.09 m,仍比136.32 m短,说明6月6日最后的常用制动力矩应是足够的;虽然ATO制动参考值累加偏小一点,但最终制动力矩输出影响不大。
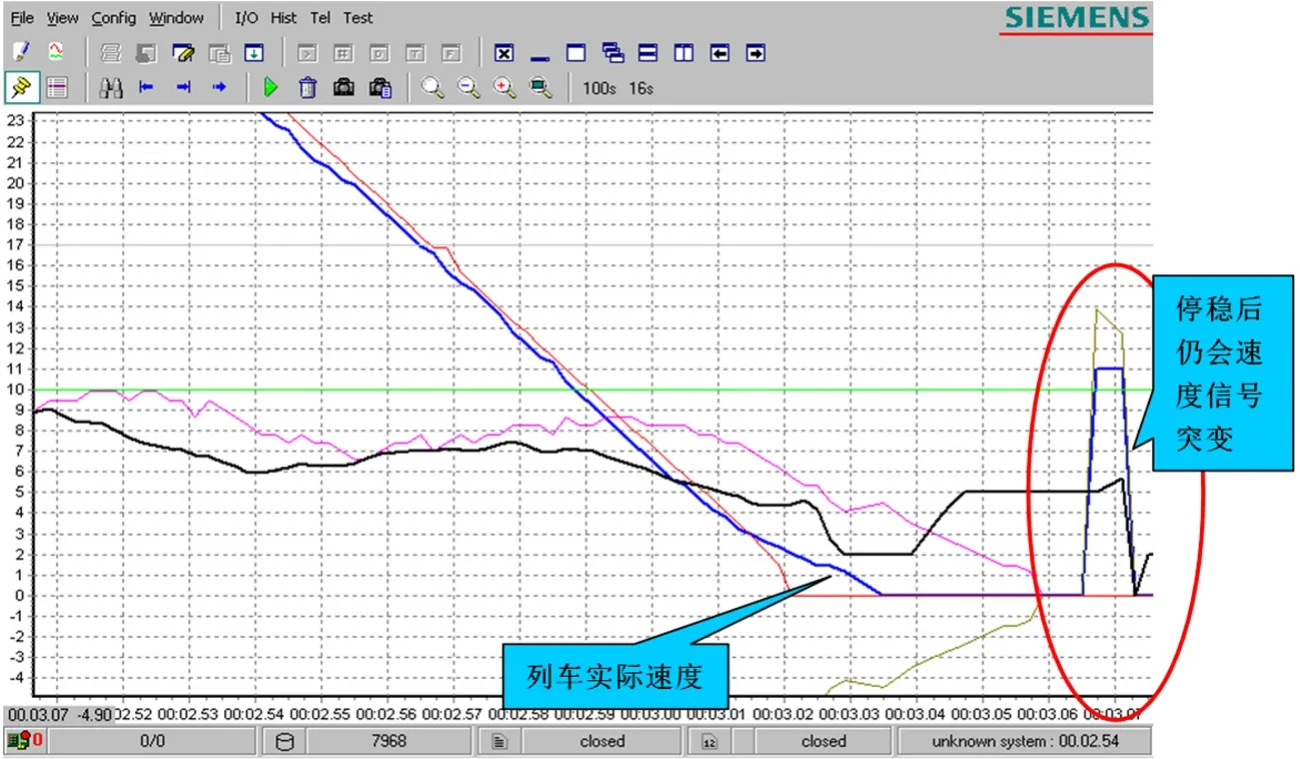
图2 信号数据速度-时间曲线
因此,6月6日行程距离较大(大了1 m),就发生了冲标故障,主要原因是在DTRO模拟下,列车启动牵引和惰性行程距离计算出现异常引起多走了2~5 m的(ATO行走距离计算存在错误)或制动指令给出计算有时间延误0.5~1 s左右导致。
从车辆故障数据计算过程中,发现信号系统行走距离计算可能存在异常问题,通过采集到的信号数据分析发现异常干扰现象。
信号采集到 6月 23日 16∶17 1714次 (1A65+66) 以ATO模式在广州东站上行到达停车标时出现速度异常(目标速度0 km/h,推荐速度0 km/h,实际速度2 km/h),司机人工介入列车停稳后冲标2 m的故障数据。
经分析ATO和ATP报文数据发现:当2A49端为驾驶端时,信号系统每个站停稳3 s后,列车速度信号突然增大过程,持续约1 s后恢复为0。并且经过速度信号突变后,ATO计算的行车距离又增加了1 m左右的距离,与ATP计算行车距离有差异;而2A50端为驾驶端时并没有该问题,如图2速度-时间曲线(图示线代表信号系统检测到的列车实际速度)。
列车停稳后,司机也未反映列车有颤动过程,对比车辆数据并未出现该速度突变脉冲(如图1),可以排除列车突然动车因素。
经判断联合分析,认为是ATO/ATP系统的速度信号受到异常的干扰引起,导致信号系统ATO速度检测存在异常突变现象,并且行走距离有变化,可能影响列车ATO行车计算精准度,最后导致列车实际对标不准现象。
3 故障排查处理
车辆方面进行排查,2A4950车两端VCU与ATO连接MVB线屏蔽良好;由信号控制的继电器:2K06、4K03、4K04、4K05、8K01、8K02、8K05、8K06继电器接线正常,线圈电阻正常。测量示波器测量接口继电器A1脚电压:发现两端的8K01、8K02均为西门子2KF40继电器,存在一定的反向电压;而另发现2A50车4K04该继电器失电后,也有明显的反向续流大电压,峰值可达千伏,证明该继电器具有放电续流回路(即二极管)已断开。
8K01、8K02、4K04继电器均与ATO指令板直接连接,并由其给出110V电控制。该部分继电器失电时存在的反向电压,会直接施加到ATO控制板内部,若ATO控制板内部没有相关反向二极管或隔离保护的设计的话,可能会形成对信号系统工作造成一定干扰影响。
车辆方面将相关8K01、8K02西门子继电器、4K04继电器二极管更换跟踪,未再次出现对标不准故障。通过ATO报文数据,确认ATO系统在列车停稳后并未再次出现异常速度突变问题。
因此,根据测量调查情况来判断,可确定故障点为4K04继电器二极管续流回路断路引起,导致继电器失电时,产生反向电压对ATO信号系统内部造成干扰问题,随即影响ATO计算出现误差,导致列车对标不准故障。
4 改进措施
目前地铁专用继电器在失电时,总是会有一定能量释放过程,需要带有一个续流回路元件将能量消耗,但不同的方式续流回路设计,有不同的效果和影响。如表2所示。
目前地铁列车使用的继电器品牌有多种,具有不同特性:AEG、GE、罗克韦尔继电器使用二极管,反向电压可以控制在0.7 V以下,即二极管导通电压,但放电时间会长,会持续到0.5秒左右;西门子继电器续流回路使用压敏电阻,有反向电压,但基本在100~250 V左右,持续时间在10 ms内,放电时间很短;而施密特、日本安川续流回路使用RC和二极管组合回路,反向电压可以控制在0.7 V以下,放电时间也较短,但价格贵。
从本次2A4950车冲标故障调查处理原因方面显示:信号系统对外接口回路容易受到干扰,特别是反向电压或电流,会导致信号系统ATO计算出现偏差,说明ATO接口回路抗干扰功能存在一定缺陷,未报出任何故障代码。且在前期多次出现过列车在折返时自动折返失败、司机关钥匙后两侧车门自动关闭的故障,信号系统故障代码为45#42#(信号系统死机代码),也发现是因8K01 8K02继电器使用西门子继电器(压敏电阻续流回路),存在反向电压,导致信号系统不规律地出现死机关闭问题。
目前西门子公司生产主流地铁专用继电器,都采用压敏电阻,且符合在大部分电路上的应用标准。因此,原西门子信号系统在接口回路抗干扰能力设计存在一定的缺陷,需要进一步研究接口电路,提高抗干扰能力,满足现场实际使用环境。
5 结束语
2A4950车在ATO模式下频繁出现对标不准故障,主要原因为4K04继电器二极管续流回路断路引起,导致继电器在失电时产生的反向电压对ATO信号系统内部造成干扰导致。
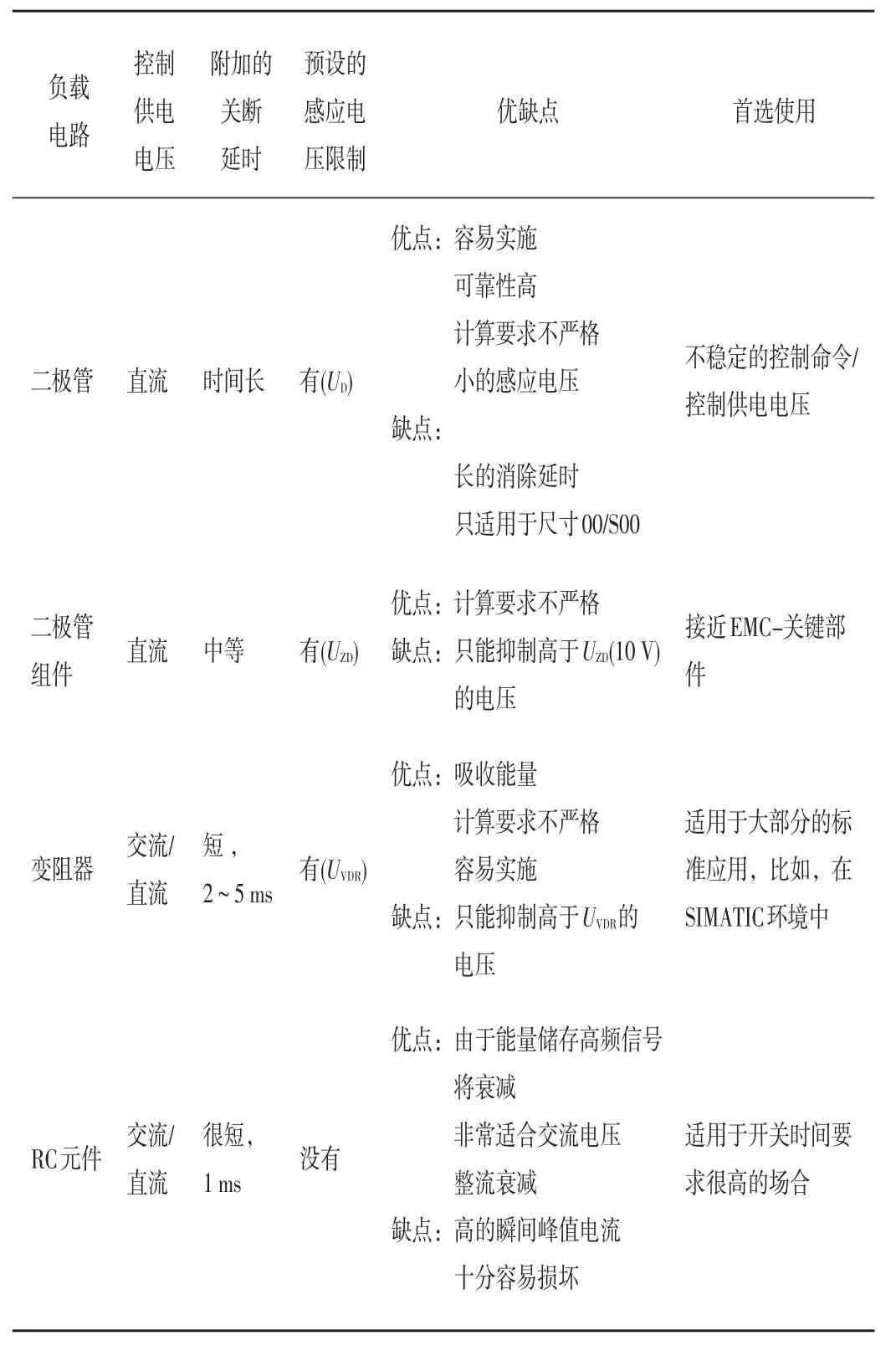
表2 不同设计的效果对比
本文提供的解决措施仅针对2A4950车故障,但通过分析国内其他城市地铁列车发生的类似故障,其原因也多为列车信号系统干扰导致,因此要从根本上解决必须从信号系统的接口电路设计入手,提高信号接口电路在各种环境下的抗干扰能力。
参考文献:
[1]王道敏.ATO站台精确停车功能的制约因素分析[J].铁路通信信号过程技术(RSCE),2012,9(4):41-43.
[2]王鹏.地铁列车ATO模式对标停车不准故障分析[J].轨道机车车辆,2015(02):118-120.
[3]廖斌.地铁电客车调试工作探讨[J].机电工程技术,2017,46(6):151-153.
