煤矿塌陷区光伏电站太阳能电池板清洁机器人的研究
2018-05-04孙卫红覃剑戈岳云涛
孙卫红 覃剑戈 岳云涛
(北京建筑大学,北京市西城区,100044)
1 前言
随着人类社会对煤炭等能源的渴求,大量开采已成为趋势,地面塌陷等灾害也随之而来。后期出现的治理困难和治理费用高等问题使得更多开采后的土地被闲置,从而造成资源上的浪费。根据国务院印发的《关于煤炭行业化解过剩产能实现脱困发展的意见》的基本原则:市场倒逼与政府支持相结合,化解产能与转型升级相结合,整体推进与重点突破相结合,从2016年开始,用3~5年的时间,再退出产能5亿t左右,减量重组5亿t左右,较大幅度压缩煤炭产能,适度减少煤矿数量,煤炭行业过剩产能得到有效化解,市场供需基本平衡,产业结构得到优化,转型升级取得实质性进展。《意见》提出,促进行业调整转型,鼓励利用废弃的煤矿工业广场及其周边地区,发展风电、光伏发电和现代农业。盘活土地资源,支持退出煤矿用好存量土地,促进矿区更新改造和土地再开发利用等多项措施。因此在煤矿塌陷区建立光伏电站能够很好地化解煤炭产业产能过剩的问题。煤矿塌陷区光伏发电站如图1所示。
大型的光伏电站太阳能电池板都是在户外,而沉陷区内矿体表层土壤剥除,地表植被遭到严重破坏,水土流失和土壤沙化严重加剧使得空气中出现很多灰尘,当光伏组件表面附着积灰时,灰尘颗粒会对入射的太阳光进行吸收和散射,导致照射到光伏组件面板上的有效面积减小以及透光率降低,并使部分入射太阳光在钢化玻璃中的传播均匀性发生改变,从而使发电效率降低,发电量减少。相关研究表明,积灰的沉积浓度越大,光伏组件的实际透光率越低,输出功率越低。

图1 煤矿塌陷区光伏发电站
目前,由于市面上还没有合适的自动化清洁设备,大多数光伏电站采用定期人工清洗的方式来清洁光伏组件,但是大型光伏发电工程往往处于缺水地区,而且人工清洗费时费力且成本较高,同时,对于光电建筑一体化项目来说,人工清洗存在一定的安全问题,所以亟需一种机械化方法来解决此问题,而采用清洁机器人清洗则可以大大提高工作效率。太阳能电池板定期人工清洗如图2所示。

图2 太阳能电池板定期人工清洗
2 清洗机器人灰尘清除原理
灰尘在落到太阳能电池板上后,一部分会自动掉落,另一部分会吸附在板面上。将尘土的单个粒子视为一个圆球形,对单个粒子的受力进行分析。由于每个地区的太阳能电池板的架设角度不同,在此将其倾斜角视作90°,与地面垂直。粒子受到重力、支持力、范德华力(分子间作用力)的共同作用时受力平衡,平衡方程见式(1):
(1)
式中:Fz——支持力,N;
G——重力,N;
Fvdw——范德华力,N。
范德华力见式(2):
(2)
式中:h——基于物质属性利夫茨范德华常数,J;
r——颗粒半径,m;
z——分子中心与接触表面的距离,m。
假设尘埃分子与太阳能电池板的位置关系如图3所示。
图3 尘埃分子受力示意图
灰尘颗粒的清除方式有滑动方式、滚动方式和拉伸方式,清洗机器人选用滑动方式。滑动方式的原理是使滑动的去除力大于太阳能电池板面与灰尘粒子的静摩擦力,进而实现将灰尘从太阳能电池板板面去除。滑动运动方式如图4所示。

图4 滑动运动方式
3 清洗机器人自动控制研究
3.1 清洁机器人控制流程图
太阳能电池板清洗机器人自动控制包括清扫控制、发电量自动检测和环境自动监测。清扫控制首先驱动电机正常启动,清扫机器人沿着太阳能电池板做直线运动,驱动电机启动的同时,清扫电机带动清扫刷部分的转子运转,通过传动轴和转子使其在太阳能电池板表面旋转,从而实现清洁的目的。清扫控制的工作流程如图5所示。

图5 清扫控制工作流程图
第一次清扫完成后进行发电量自动检测,若太阳能电池板发电量提高3%,则停止清扫,否则继续进行清扫,直到达到要求。发电量自动检测控制流程如图6所示。
图6 发电量自动检测控制流程图
环境自动监测根据光照量和温度判断是否进行清洁工作,如果光照量和温度较低,清扫机器人不动作,直到光照量和温度达到要求,机器人开始动作。环境自动监测流程如图7所示。

图7 环境自动监测控制流程图
3.2 自动控制算法研究
目前常用的控制技术有PID控制技术、神经网络控制技术和模糊控制技术。PID控制技术的原理较为简单,控制效果好,适应性强。本项目采用PID控制技术。PID的控制规律见式(3):
(3)
式中:u(t)——PID控制器的输出;
Kp——比例常数;
e(t)——PID控制器输出纸盒给定值偏差信号;
Ti——积分时间常数;
Td——微分时间常数。
PID控制器输出纸盒给定值偏差信号e(t)见式(4):
e(t)=r(t)-c(t)
(4)
式中:r(t)——输入信号;
c(t)——输出信号。
图8 执行子系统控制流程图
执行子系统在工作状态时,由于对直流伺服电机控制时会出现数量幅值变化较大的情况和电机的启停状况,这两种情况可能会导致系统输出量变化较大的状况,进而PID控制在进行积分运算时会发生异常,计算得出的输出值会与实际值有较大的误差,产生超调现象,超调将导致清扫装置进行作业时实际的路径与规划的路径不一致,清扫部分也不在正常工作模式,严重时还会失去稳态,对清扫装置和太阳能电池板造成损坏。以上的情况是要尽量避免发生的,这就要求PID算法在进行计算时要尽可能的准确。
本文采用积分分离混合积分修正系数的PID控制算法,当最初设定的输入常数和被控制量的实际值有一些偏差时,比例单元单独进行计算,其他两部分不发挥任何功能。通过这种方法,积分单元的误动对系统造成的影响会相对减小,使系统平稳地工作在一个相对的稳态;当最开始给定的值和被控制量的实际值无明显偏差时,利用积分单元可以降低最后的误差。上述两条可以保证整个控制系统实时保持在一个比较稳定的控制策略之中。PID控制器在工作状态时,通常会通过限幅值来计算控制量。积分功能会被忽略,因此,通常会加上一个积分修正系数,在输出的被控制量比限幅值大时,积分修正系数开始发挥作用。在控制系统正常启动时,修正功能显得更为重要,起到了关键性的作用,它不仅在过渡时间的层面上起着关键性作用,而且可以使超调量一直保持在一个合适的范围之内。通过上述的调节方法,整个系统的响应能力得到了明显的提升。
4 清洗机器人路径规划
由于光伏电站太阳能电池板是由很多小块拼成一大块来集中使用发电,所以本项目考虑将清洗电池板的单位设置为一块太阳能电池板为一个清洗单元,电池板之间拼接的沟壑为单元与单元之间界线,进而采用优先级启发式算法使清洗机器人能在太阳能电池板上做往复运行达到清洗电池板的目的。
对清洗机器人进行主运动方向选择的设定。由于太阳能电池板上不存在不可踩踏的框架或胶条障碍物,所以能自由的设定清洗机器人的主运动方向。本项目选择竖直方向为主运动方向。
在清洗机器人工作过程中需要判断下一块清洗的单元是否已清洗过,所以还要对机器人工作的空间分解成一系列具有二值信息的栅格网络。本项目中根据太阳能电池板结构模型,将已清洗单元记为“0”,未清洗单元记为“1”存于计算机中。太阳能电池板结构模型如图9所示,工作空间二值信息栅格网络如图10所示。
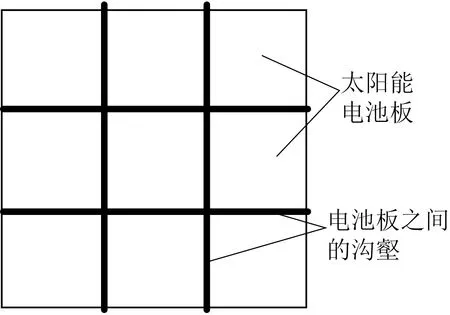
图9 太阳能电池板结构模型
4.1 优先级启发式算法
机器人主运动方向确定并完成工作空间的二值赋值后,采用优先级启发式算法来完成清洗机器人的路径规划。对二值栅格网络中的某个栅格来说,下一个可被扩展的栅格是这个栅格的上、下、左、右4个单元格。对于本项目中以竖直方向为主运动方向的太阳能电池板清洗机器人来说,优先级定义顺序依次为:左栅格、下栅格、上栅格、右栅格。以纵向为主运动方向的优先级启发式算法路径规划图如图11所示。
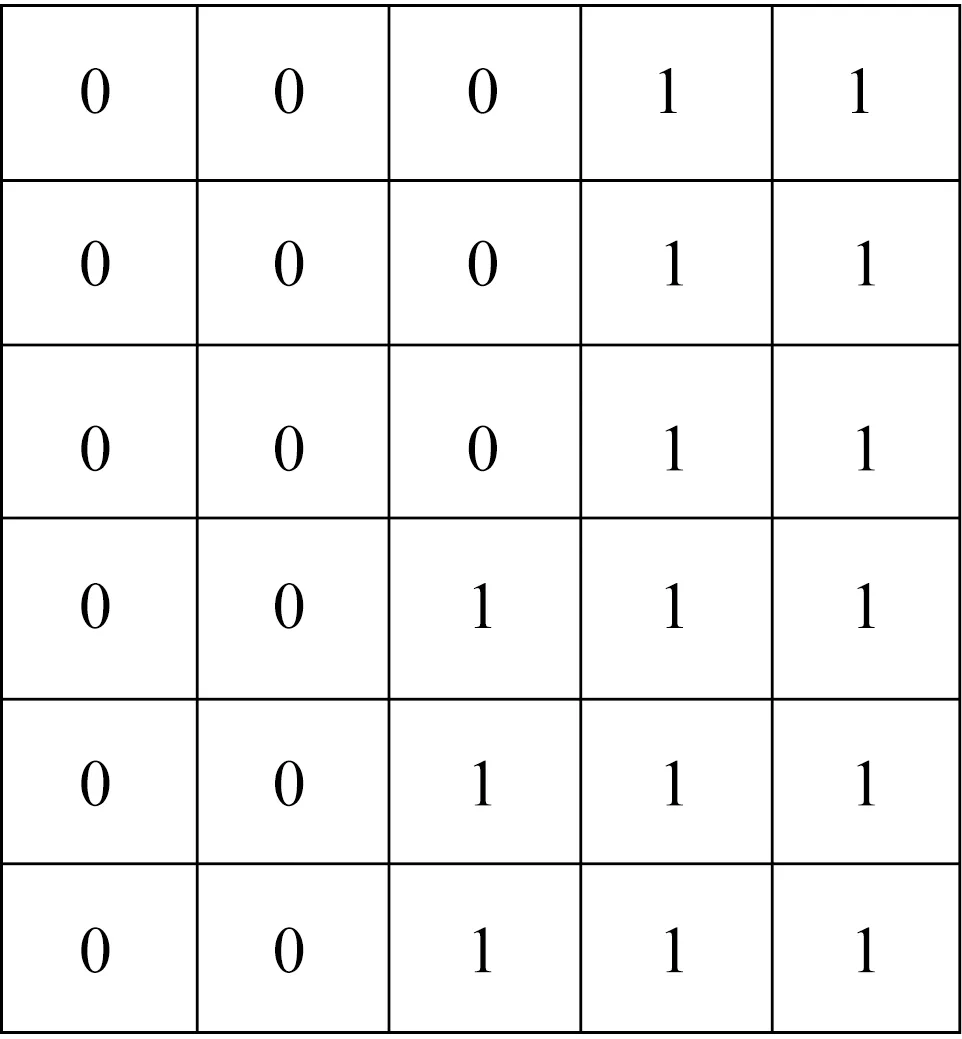
图10 工作空间二值信息栅格网络

图11 以纵向为主运动方向的优先级启发式算法路径规划图
由图11可以看出,假设当前栅格为p,首先检测到i,记为“0”,表示已清洗栅格;然后检测到q,记为“1”,是未清洗栅格,则清洗机器人下一步遍历到q,被遍历的栅格用0表示。当清洗机器人遍历到电池板边缘时,假设当前栅格为r,首先检测到g,从图中可知,g为“0”,为已清洗栅格;然后检测下栅格,因为下栅格在电池板范围外面所以跳过,接着检测到q,为“0”,已清洗,最后检测到s,为“1”是未清洗栅格,则清洗机器人下一步遍历到s,被遍历的栅格用0表示,然后以1为当前栅格,继续遵循上述优先级遍历规则进行新一轮的判断。
4.2 路径规划仿真实验
在实验中,用矩阵的形式对已知的机器人工作空间进行二值赋值如图12所示。
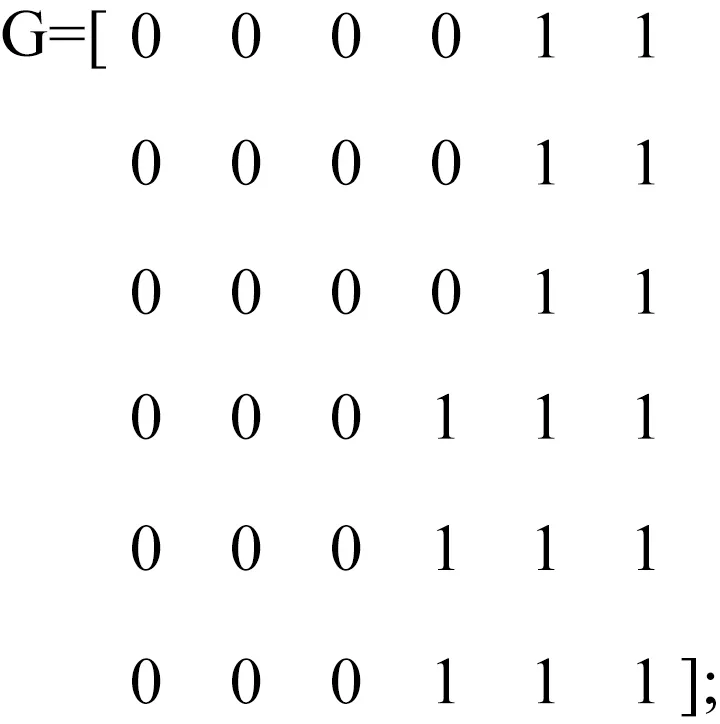
图12 工作空间二值赋值的矩阵形式
图12中“0”表示已清洗,“1”表示未清洗,工作空间仿真图像如图13所示。
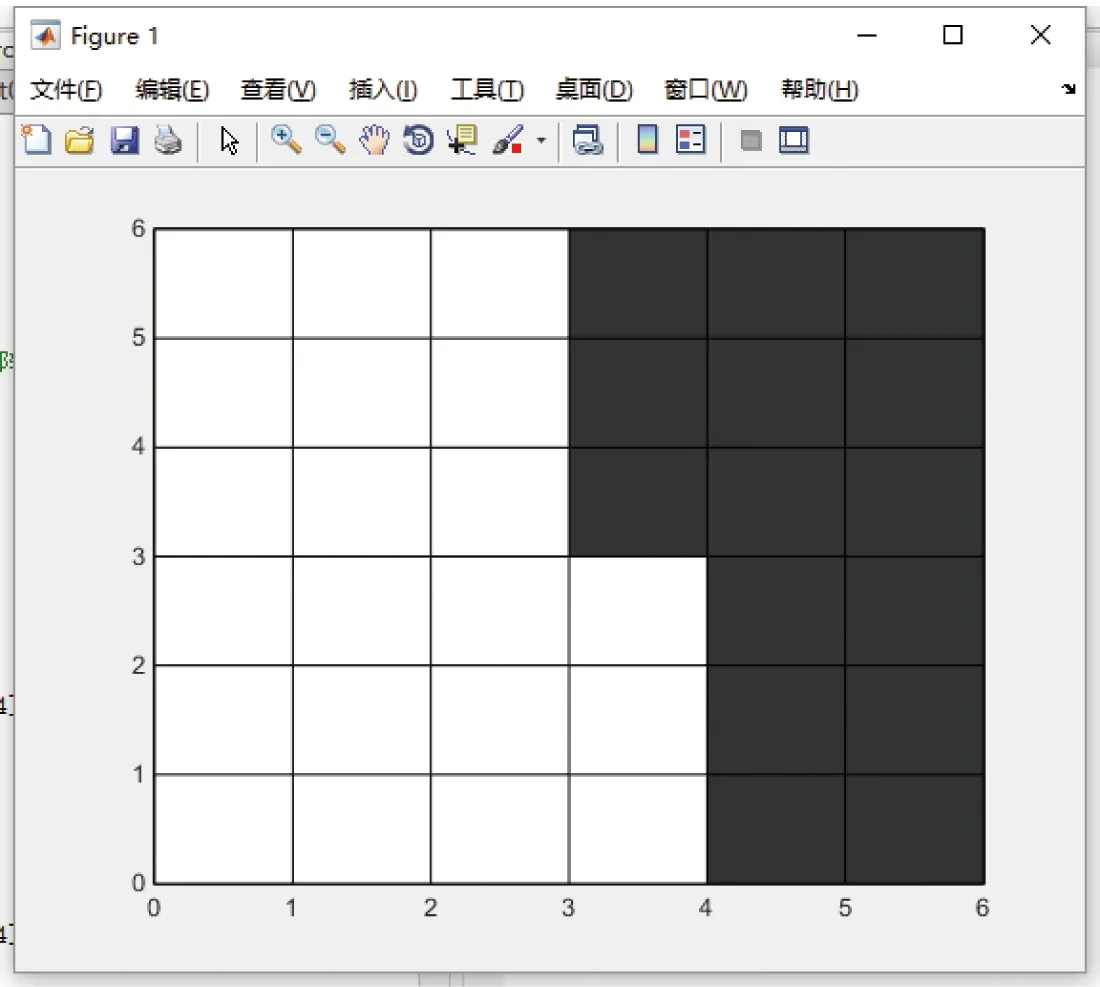
图13 工作空间仿真图像
由图13可以看出,黑色部分表示还没有清洗,执行优先级启发式算法仿真程序得到的仿真图如图14所示。

图14 优先级启发式算法在工作空间中仿真图
由图14可以看出,图13中未清洗部分已经被清洗,且得到清洗机器人运行路径如图15所示。
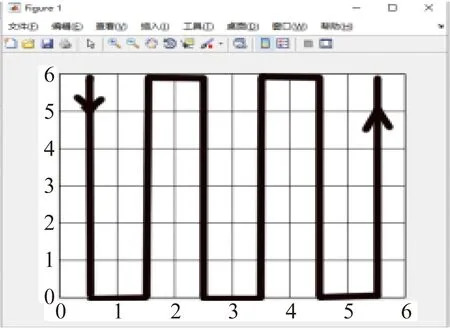
图15 清洗机器人运行路径
清洗路径为沿纵向自上而下单向清洗,完成一列电池板的清洗后,横向移动一格到未清洗板面,再向上遍历到工作区域顶端,然后重复上述过程直到所有板面清洗完成。图上的箭头表示清洗的路径方向,起点和终点可根据算法设置。
4 结语
煤矿塌陷区的光伏电站太阳能电池板都是搭建在沙漠化严重的土地中,空气中大量的灰尘堆积在太阳能电池板上会影响光伏板的发电效率,所以太阳能电池板的定期清洁工作非常重要。采用清洁机器人完成清洁可以大大提高工作效率,本文分析了其清洁原理,进行了自动控制、路径规划的研究,解决了太阳能电池板的清洁难题,对煤炭行业化解过剩产能有积极作用。
参考文献:
[1] 李蔚.我国太阳能光伏产业发展趋势探讨[J].万方数据,2009 (8)
[2] 邹新.光伏电站组件清洗效果及方法初探[A].第十一届中国光伏大会暨展会会议论文集[C],2012(7)
[3] Heng Yu Lia, Ricardo Thereon, Gregory Roader, et.al.Insights into the Encapsulation Process of Photovoltaic Modules: GCMSAnalysis on the Curing Step of Poly(ethyleneco-vinyl acetate)(EVA) Encapsulate[J]. Polymers&Polymer Composites, 2012(8)
[4] 王妹婷,齐永锋,陆柳延等.双向清洗机器人玻璃幕墙完全遍历路径规划[J].机械设计与制造,2013(11)
[5] 成思思.废弃煤矿发展光伏成趋势[N].中国能源报,2016.2.24
[6] 王丽,卜桂玲,郭文斌.海拉尔煤矿塌陷区地质环境恢复治理研究[J].中国煤炭,2014 (5)
[7] 丁国华,邹彦林.论煤矿塌陷区综合开发利用[J].农业环境保护,1994 (5)
[8] 孙欢伟.积灰对光伏系统发电效率影响及改善[D].大连理工大学,2015
[9] 郑涛,黄少鹏.煤矿塌陷区人工湿地处理污水的可行性研究[J].中国煤炭,2010(5)
[10] 曹晶.户外光电池面板自动清洁控制系统的设计[D].长春工业大学,2015
[11] 李艳强,吴超,阳富强.微颗粒在表面粘附的力学模型[J].环境科学与技术,2008(1)
