基于高逼真驾驶模拟器雾霾天气下跟驰行为分析
2018-05-04涂辉招
时 恒, 涂辉招, 高 坤
(同济大学 道路与交通工程教育部重点实验室, 上海 201804)

以往研究多针对晴天和雾霾天的驾驶行为差异性进行分析,而较少关注不同交通状态下驾驶行为特别是跟驰行为的差异.本研究基于同济大学8自由度高逼真驾驶模拟器,构建晴天和雾霾天两个实验场景,在每个实验场景下分别进行自由流、拥挤流和阻塞流跟驰驾驶模拟实验,采集驾驶员在两个场景不同交通状态下的跟驰行为数据,分析晴天和雾霾天不同交通流跟驰状态下后车延迟时距、车头间距、车头时距和加速、减速行为等在晴天和雾霾天的差异.
1 研究方法
1.1 跟驰行为变量
1.1.1延迟时距
延迟时距是指后车在前车行驶状态改变后随之改变行驶状态的时间间隔,表征了后车受到前车刺激时改变自身行驶状态的灵敏程度.
Zhang等[11]在研究中提出了驾驶员延迟时距的标定方法,以±0.15 m·s-2作为前后车加、减速度变化的阈值,以前后车加、减速度变化阈值时刻的时间间隔作为跟驰行为延迟时距.本研究前车的加、减速度并非连续变化,借鉴Zhang等[11]提出的研究成果,以前车加速度改变的时刻为Tf,后车加速度阈值0.15 m·s-2出现时刻为Tb,根据式(1)确定跟驰行为延迟时距.延迟时距T的标定方法如图1所示.
T=Tf-Tb
(1)

图1 驾驶员跟驰行为延迟时距标定方法
Fig.1Calibrationmethodofdrivers’delaytimeincarfollowingprocess
1.1.2车头间距、车头时距
车头时距描述了相同车道上连续的前后两车通过同一道路断面的时间间隔,排除了速度对前后两车空间距离的影响,是描述前后两车时空特性的重要指标.后车驾驶员会通过改变行驶速度以维持理想的车头间距,从而保证一定的车头时距[5].跟驰过程中的最大车头间距是后车驾驶员为了维持跟驰状态能够接受的最大距离,最小车头间距是驾驶员能够接受的最小安全距离.分别统计后车驾驶员在自由流、拥挤流和阻塞流状态下平稳跟驰过程中能够接受的最大车头间距时的车头时距(记为最大车头时距)、最小车头间距时的车头时距(记为最小车头时距)和Tb时刻的车头时距,分析雾霾天气对驾驶员车头时距的影响.后车驾驶员在Tb时刻的车头间距(记为D)、最大车头间距(记为Dm)和最小车头间距(记为Dn)的标定方法见图2.
1.1.3加速、减速行为
后车驾驶员的加、减速行为描述了后车驾驶员跟驰过程中的速度策略,是跟驰行为的重要组成部分,也是影响交通流稳定的重要因素[9].后车在平稳跟驰过程中加、减速度的大小描述了后车驾驶员加速、减速的意愿大小,每间隔0.1 s记录一次后车的加速度和减速度,分别统计晴天和雾霾天后车在自由流、拥挤流和阻塞流状态下平稳跟驰过程中的加速度和减速度,分析晴天、雾霾天不同交通状态对后车驾驶员加、减速行为的影响.
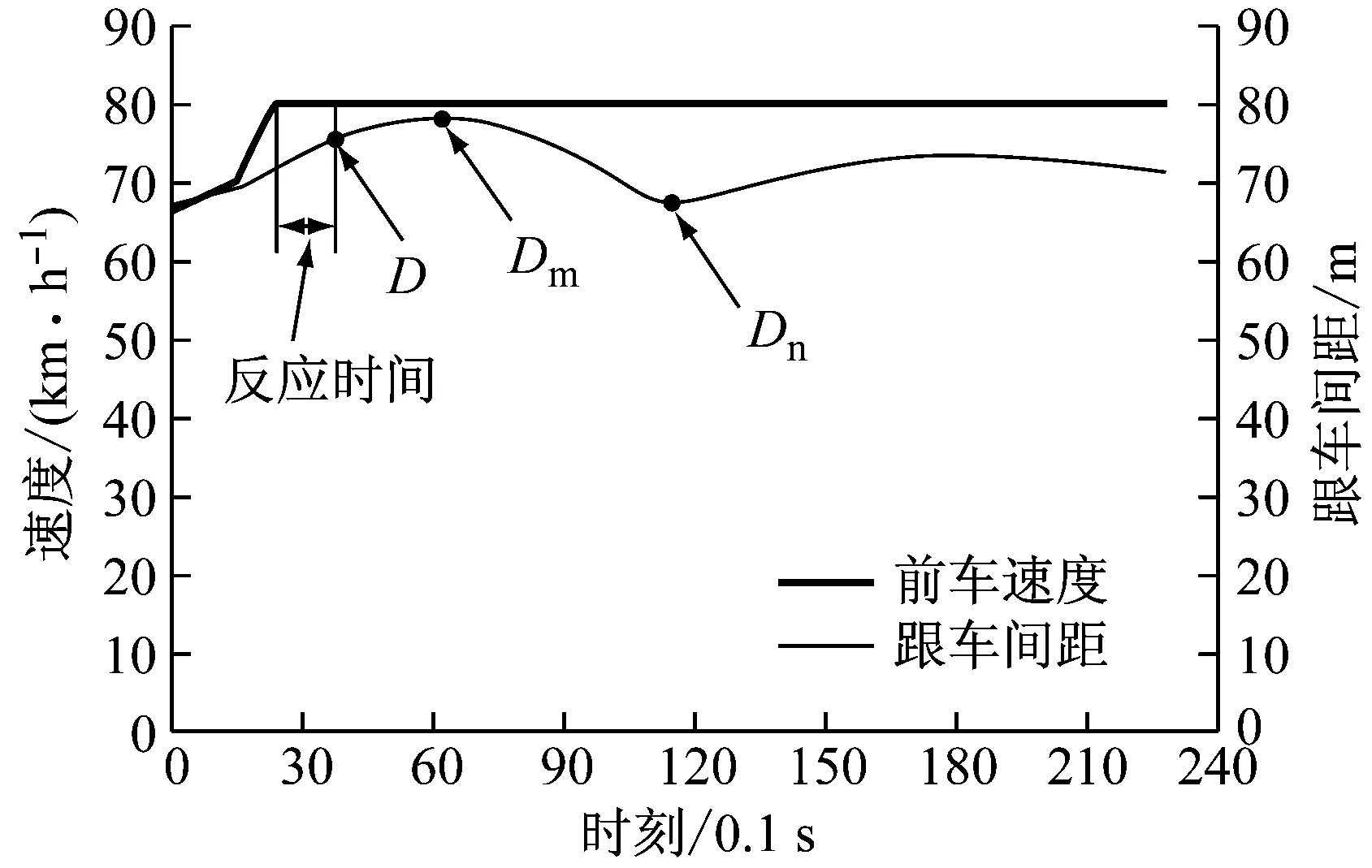
图2 跟驰过程车头间距标定方法Fig.2 Calibration method of space headway in carfollowing process
1.2 高逼真驾驶模拟实验
1.2.1实验设备
本次实验使用同济大学高逼真度驾驶模拟器,如图3所示.该模拟器的驾驶模拟舱中放置了一辆完全真实的车辆,该车设置了真实的力反馈系统,包括方向盘、油门、刹车.车辆前方是一个250°的环形屏幕,刷新频率是60 Hz.通过SCANeRTM软件来控制整个驾驶模拟器.该驾驶模拟器配备了8自由度的运动系统,此运动系统可以开启和关闭.

图3 同济大学8自由度驾驶模拟器Fig.3 High fidelity driving simulator inTongji University
1.2.2实验方案

a 晴天跟驰实验场景

b 雾霾天跟驰实验场景图4 雾霾天和晴天跟驰实验场景示例Fig.4 Scenarios in haze and clear weather conditions
在晴天和雾霾天驾驶模拟实验场景中,每位驾驶员将分别在双向四车道限速120 km·h-1的高速公路上跟驰前车行驶,前车由静止加速至低速(10 km·h-1, 模拟阻塞流跟驰),在低速匀速行驶一段时间后加速至中速(40 km·h-1, 模拟拥挤流跟驰),之后再中速平稳行驶一段时间后加速至高速(80 km·h-1, 模拟自由流跟驰)并在高速平稳行驶一段时间.记前车加速度改变的时刻为PA(action point),跟驰过程中前车的速度轨迹将包括图5所示的3个加速度改变时刻(PA1~PA3)以标定不同跟驰状态下后车的延迟时距等跟驰行为变量,PA1~PA3的含义和对应的延迟时距如表1所示.

表1 PA时刻含义及对应延迟时距意义Tab.1 Action points and physical meanings
1.2.3实验样本
驾驶模拟实验样本量大小主要参考以往研究(12~32名驾驶员不等)[12-14],选定了32名驾驶员进行实验.表2给出了参与实验驾驶员的基本信息,他们都拥有合格的驾驶证,无驾驶模拟症.

图5 跟驰实验前车速度轨迹设置Fig.5 Speed as a function of time slides ofleading car

表2 参与实验驾驶员基本信息Tab.2 General information of drivers
1.2.4数据采集
每位驾驶员将被告知应遵守的操作规范,并熟悉驾驶模拟器.随后驾驶员在实验环境下的一条高速公路上自由驾驶5 min,在此过程中,驾驶员将经历加速、减速、平稳行驶等过程,同时驾驶员也将熟悉踩踏油门和刹车板的动作,与此同时,观察员将确认驾驶员是否有不适反应.若驾驶员一切正常,休息5 min后开始正式实验.在驾驶实验进行的过程中记录下前、后车的行驶轨迹数据,包括速度、加速度、车头间距等跟驰行为变量.
2 实验结果与分析
2.1 雾霾天气对车头时距、车头间距的影响
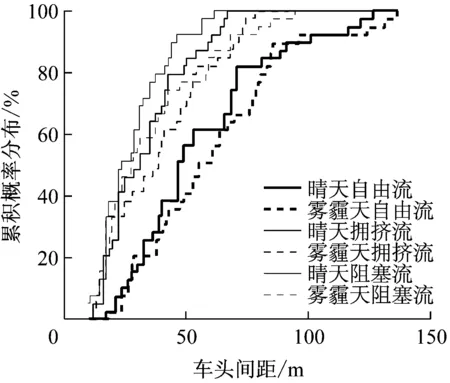
图6给出了晴天和雾霾天不同交通流跟驰状态下最大、最小车头时距、间距的累积概率分布.最大车头时距在不同交通状态下存在较大异质性(图6a),最小车头时距在不同交通状态下的异质性则较小(图6b).最大车头间距和最小车头间距在不同交通状态下存在较大异质性.以T检验或秩和检验判断均值差异性,以F检验判断方差齐性,表3给出了晴天和雾霾天车头间距、时距的差异显著性检验.以Kruskal-Wallis检验判断均值差异性,以单因素方差分析判断方差齐性,表4给出了不同交通状态下车头间距、车头时距的差异显著性检验.
表3晴天和雾霾天最大、最小车头间距、时距差异显著性检验
Tab.3Significanttestsformaximum/minimumdistance/timeheadwaysunderclearandhazyweatherconditions

检验变量交通状态均值检验方差检验(雾霾天-晴天)/晴天均值/%标准差/%最大车头间距自由流拥挤流阻塞流*显著*显著**显著不显著不显著*显著8.719.425.65.632.155.3最小车头间距自由流拥挤流阻塞流*显著不显著不显著不显著不显著不显著-13.0-6.5-12.7-21.9-11.09.0最大车头时距自由流拥挤流阻塞流不显著不显著不显著不显著*显著不显著8.9-5.3-10.84.6-43.6-13.3最小车头时距自由流拥挤流阻塞流不显著不显著**显著*显著不显著**显著21.08.5-47.949.8-23.483.2
注:*α=0.1;**α=0.05.

表4 不同交通状态下最大、最小车头间距、时距差异显著性检验Tab.4 Significant tests maximum/minimum distance/time headways under different traffic conditions
注:*α=0.1;**α=0.05.
对比不同交通状态下跟驰行为的车头时距和车头间距特性,从表4可以看出,拥挤流跟驰状态下的最大车头时距和最小车头时距相对于自由流和阻塞流较小,说明驾驶员在拥挤流跟驰状态具有更大的信心以较小的车头时距跟驰前车行驶.在阻塞流跟驰状态,由于当前车速较低,车头时距较大,随着速度的增加,车头时距随之减小,拥挤流跟驰状态的最大车头时距相对阻塞流跟驰状态在晴天和雾霾天分别减小了58.7%和56.2%,最小车头时距分别减小了58.5%和13.7%.当车速较高时,后车驾驶员为了保证行驶安全以较大的车头间距跟驰前车行驶,此时的车头时距相对于中速跟驰状态显著增加,其中自由流跟驰状态下最大车头时距相对于拥挤流跟驰状态在晴天和雾霾天分别增加了59.1%和82.9%,最小车头时距分别增加了77.0%和97.5%.从表4还可以看出,随着车速的提高,最大车头间距及其离散性随之显著增加,说明车速越高,车流密度越低且稳定性越差.

a 最大车头时距

b 最小车头时距
c 最大车头间距

d 最小车头间距图6 不同交通状态下驾驶员最大、最小车头时距、间距累积概率分布Fig.6 Cumulative probability distributions of maximum/ minimum distance/time headways under differenttraffic conditions
对比晴天和雾霾天车头间距和时距特性,从表3可以看出,雾霾天气对不同交通状态的最大车头间距都有显著影响,雾霾天气下最大车头间距在自由流、拥挤流和阻塞流跟驰状态下分别增加了8.7%、19.4%和25.6%;雾霾天气对车头时距的影响较小,主要影响了阻塞流跟驰状态下的最小车头时距,使得最小车头时距减小了47.9%,同时使得其离散性增加了83.2%.对比结果说明雾霾天气由于其能见度低的特性,会影响后车驾驶员的空间距离感知,但是对驾驶员的时间间隔感知影响较小.
雾霾天自由流状态下驾驶员灵活性较大,虽然最大车头间距显著增加了,但由于能见度低,驾驶员对交通流环境反应时间增加(即延迟时距增加),导致了最小的车头时距显著减少.雾霾天3种交通状态下的最大车头间距相比晴天都显著增加,说明雾霾天车头间距的离散性大大增加.虽然,驾驶员在雾天采取了更为谨慎的驾驶行为(最大车头间距增加),但同时雾霾天气下交通风险也显著增加(最小的车头间距和车头时距都显著减少).
2.2 雾霾天气对延迟时距的影响
图7给出了不同交通流跟驰状态下延迟时距的累积概率分布,随着速度的增加,延迟时距的均值和标准差都有增加的趋势(图7d).说明在阻塞流跟驰状态下,由于前后车行驶速度较低且车头间距较小,后车驾驶员会更快地对前车的刺激做出反应,随着速度的增加,车头间距随之增大,后车驾驶员判断前车行驶状态的难度增加,其反应变得相对迟缓,导致延迟时距增加.
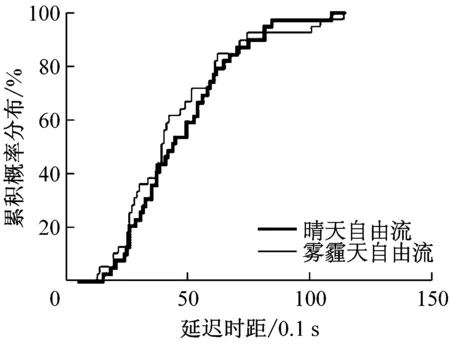
a 自由流跟驰状态
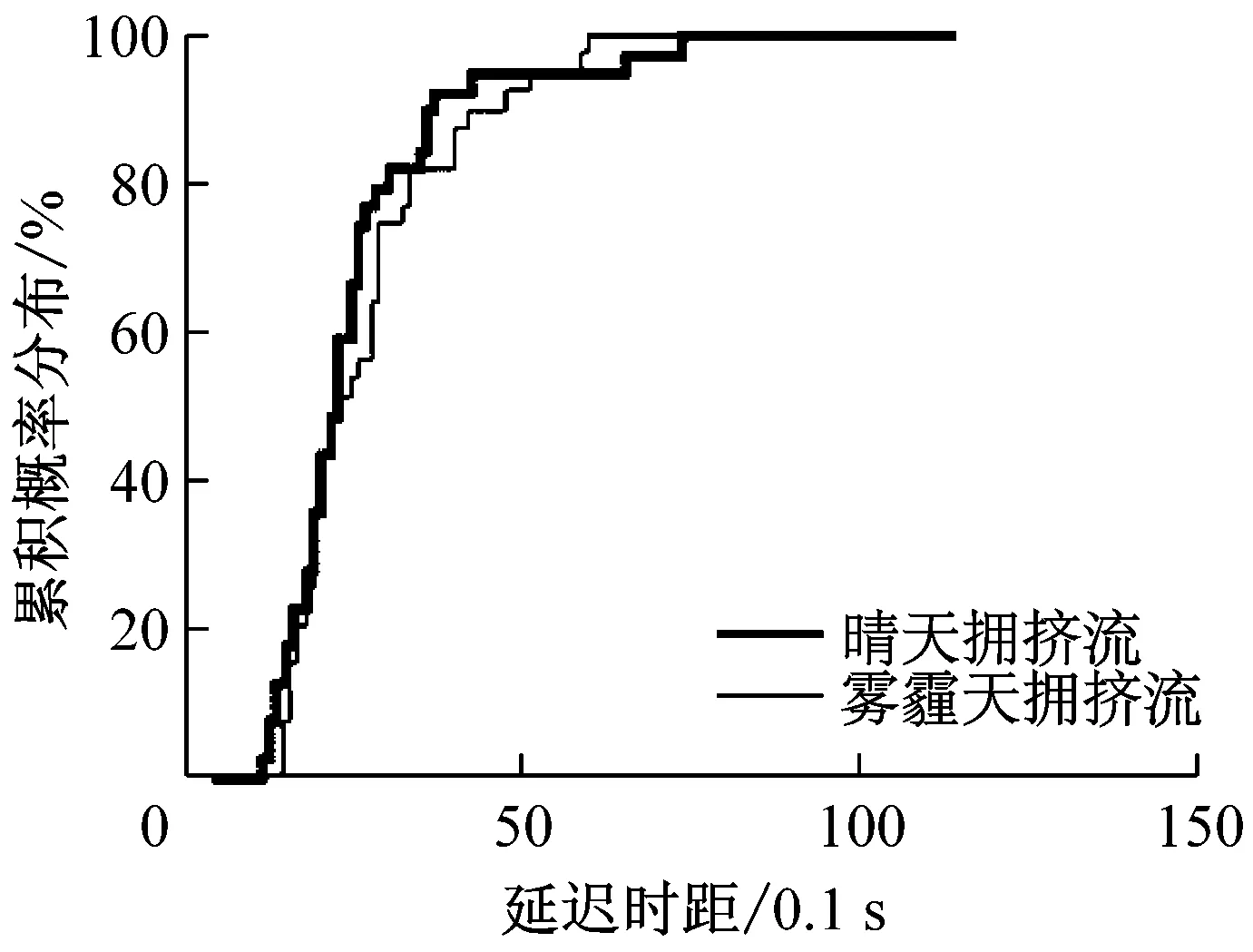
b 拥挤流跟驰状态

c 阻塞流跟驰状态

d 不同交通状态下延迟时距对比图7 不同交通状态下延迟时距累积概率分布Fig.7 Cumulative probability distributions of delay time under different traffic conditions
表5给出了不同交通流跟驰状态下延迟时距在晴天和雾霾天的均值和标准差及其差异性检验.自由流和拥挤流跟驰状态下,延迟时距在晴天和雾霾天的差异性不显著,而阻塞流跟驰状态下存在显著性差异.对比结果说明:当行驶速度较大时,后车驾驶员更期望保持较大的跟车间距,从而避免频繁地对前车的行驶状态做出反应,此时雾霾天气对后车行驶策略的影响较小.而当速度较低时,雾霾天气会显著地影响驾驶员对前车的感知,从而影响后车的行驶策略,使得延迟时距比晴天增加了15.5%,并且其离散性增加了28.2%.驾驶员反应时间的增加是导致延迟时距增加的主要因素,同时也导致了最小车头时距显著减小.
表5晴天和雾霾天气下延迟时距均值、标准差及其差异性检验
Tab.5Significanttestsfordifferencesofmeanvalueandstandarddeviationofdelaytimeunderclearandhazeweatherconditions

交通状态均值差异性方差齐性(雾霾天-晴天)/晴天均值/%标准差/%自由流不显著(0.706)不显著(0.630)-4.314.7拥挤流不显著(0.429)不显著(0.642)8.9-6.3阻塞流*显著(0.092)*显著(0.085)15.528.2
注:*α=0.1,**α=0.05.
从表6可以看出,在晴天和雾霾天气下,不同交通流跟驰状态下的延迟时距存在显著性差异,随着速度增加,延迟时距及其离散性显著增加.
表6不同交通状态下延迟时距均值、标准差及其差异性检验
Tab.6Significanttestsfordifferencesofmeanvalueandstandarddeviationofdelaytimeunderdifferenttrafficconditions

天气状态均值差异性方差齐性(自由流-拥挤流)/拥挤流(拥挤流-阻塞流)/阻塞流均值/%标准差/%均值/%标准差/%晴天**显著(0.000)**显著(0.000)89.864.927.279.9雾霾天**显著(0.000)**显著(0.000)66.7102.720.231.4
注:*α=0.1;**α=0.05.
2.3 雾霾天气对驾驶员加速、减速行为的影响
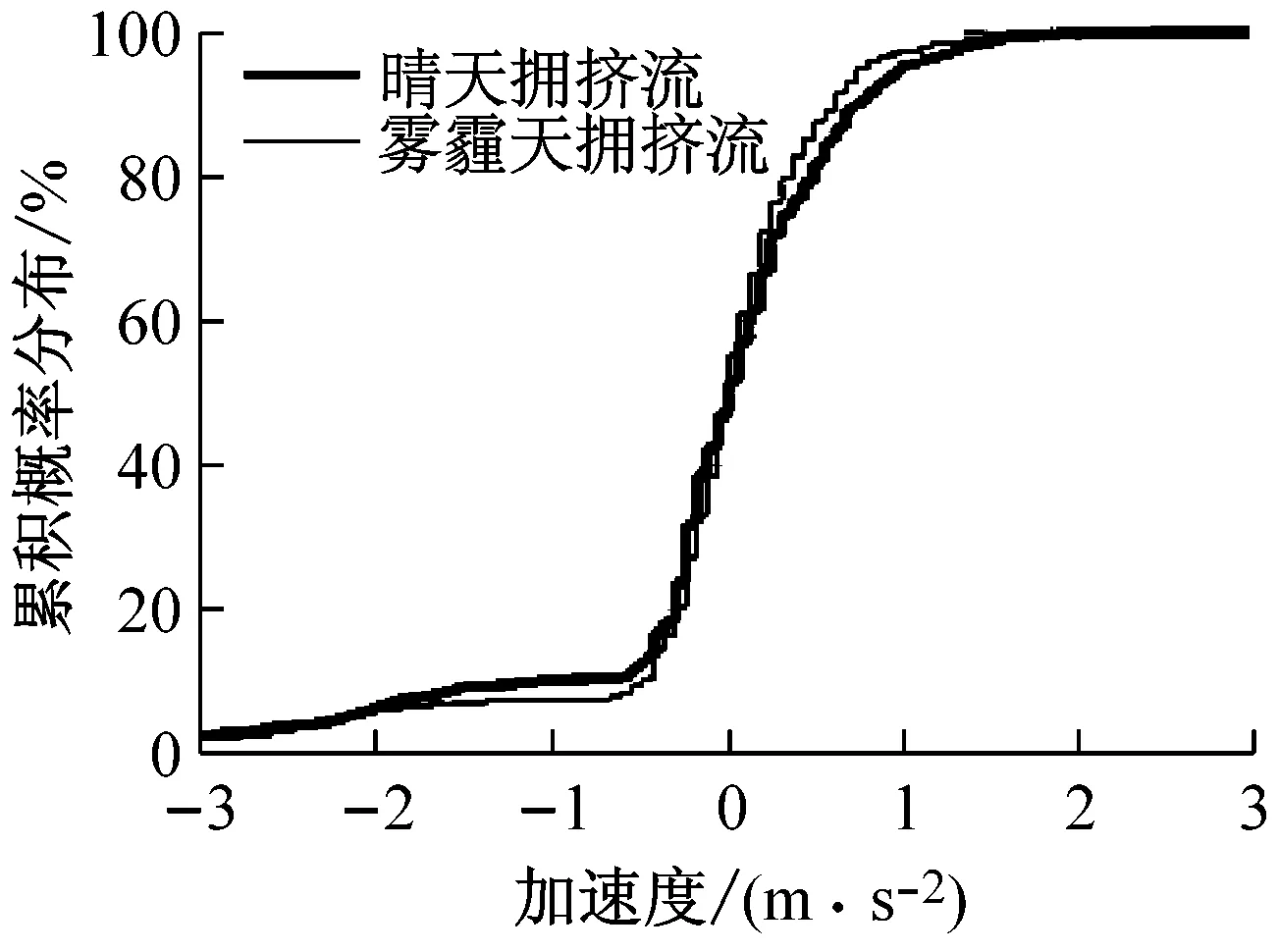
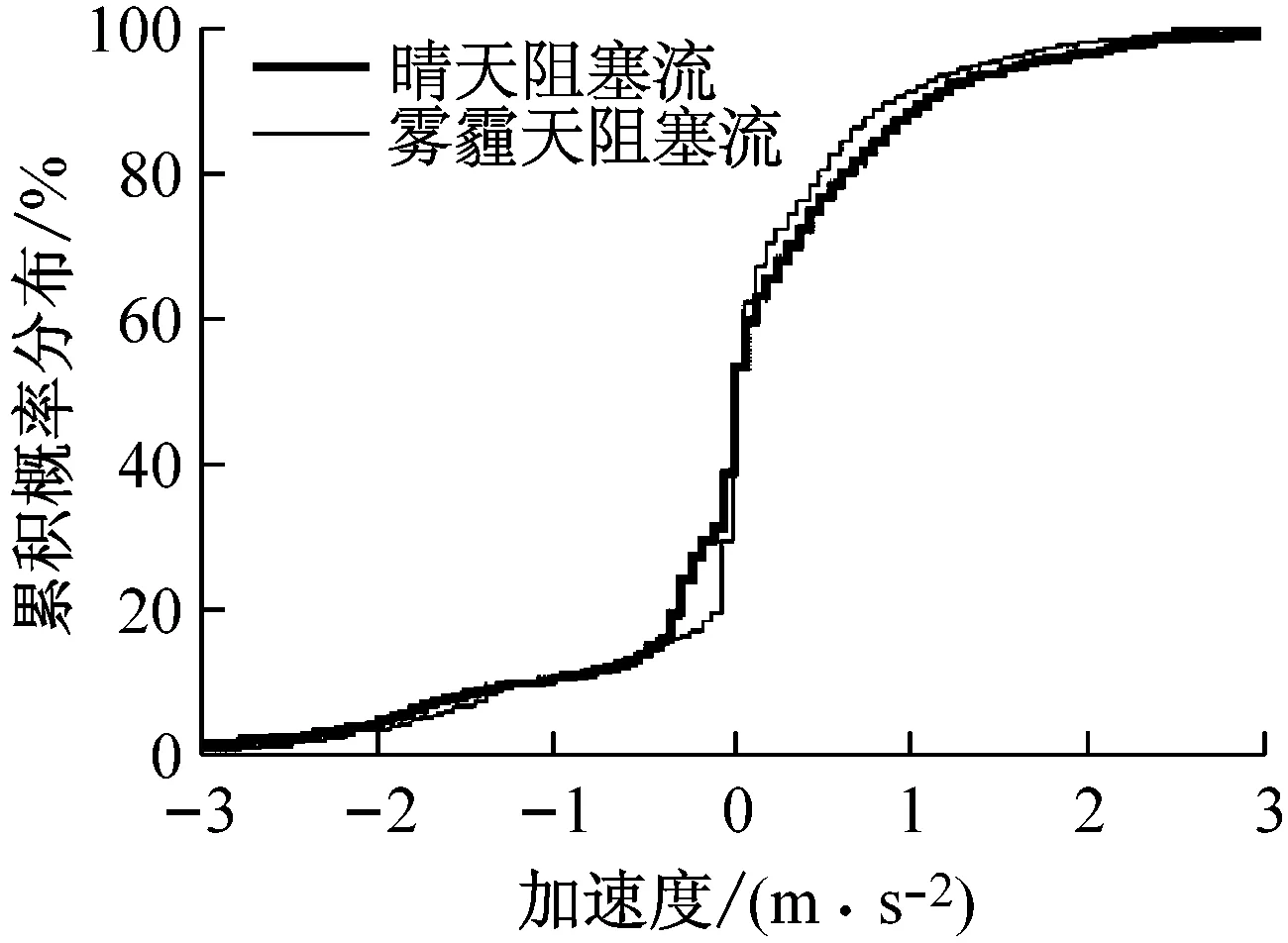
图8描述了晴天和雾霾天驾驶员在不同交通流跟驰状态下的加、减速特性.
在自由流、拥挤流和阻塞流跟驰状态下后车加速度在雾霾天的最大值均小于晴天(表7),说明驾驶员在雾霾天的加速行为更为谨慎.后车在整个平稳跟驰过程中的加速度和减速度均值为正值,说明处在跟驰过程中的后车驾驶员存在加速的趋势,并且在拥挤流跟驰状态下的加速趋势大于自由流和阻塞流跟驰状态(图8d).从不同交通状态下的后车加、减速行为的对比结果来看,随着速度的增加,后车加速度和减速度的标准偏差随之减小,说明加速度和减速度离散程度变小,后车驾驶员会更谨慎地驾驶车辆.

a 自由流状态
b 拥挤流状态
c 阻塞流状态

d 不同交通状态下加减速差异图8 不同交通状态下驾驶员加、减速行为特征Fig.8 Features of drivers’ acceleration/deceleration behaviors under different traffic conditions表7 加、减速度统计描述Tab.7 Statistical description of acceleration/deceleration rate
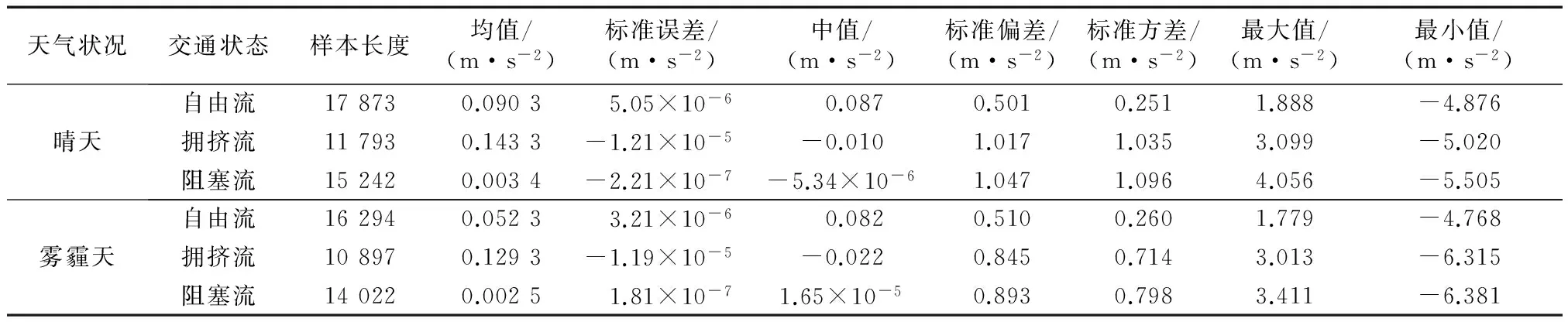
天气状况交通状态样本长度均值/(m·s-2)标准误差/(m·s-2)中值/(m·s-2)标准偏差/(m·s-2)标准方差/(m·s-2)最大值/(m·s-2)最小值/(m·s-2)晴天自由流178730.09035.05×10-6 0.0870.5010.2511.888-4.876拥挤流117930.1433-1.21×10-5-0.0101.0171.0353.099-5.020阻塞流152420.0034-2.21×10-7-5.34×10-61.0471.0964.056-5.505雾霾天自由流162940.05233.21×10-6 0.0820.5100.2601.779-4.768拥挤流108970.1293-1.19×10-5-0.0220.8450.7143.013-6.315阻塞流140220.00251.81×10-71.65×10-50.8930.7983.411-6.381
3 结论
本文基于8自由度高逼真度驾驶模拟器,构建晴天和雾霾天两个实验场景,分析了自由流、拥挤流和阻塞流交通状态下的延迟时距、车头间距、车头时距和后车的加速、减速行为等跟驰行为关键变量,主要结论如下:
拥挤流交通状态下的驾驶员具有更大的信心以更小的车头时距跟驰前车行驶,其车头时距及其离
散性相对自由流和阻塞流跟驰状态较小.阻塞流交通状态下,雾霾天气下驾驶员更谨慎的驾驶是导致延迟时距增加、最小车头时距显著减小的主要原因.
雾霾天气显著影响了驾驶员的车头间距感知,对车头时距感知的影响却较小.同时,雾霾天气显著影响了跟驰行为,最大车头间距在自由流、拥挤流和阻塞流跟驰状态下分别增加了8.7%、19.4%和25.6%;自由流跟驰状态下最小车头间距减小了13.0%;阻塞流跟驰状态下最小车头时距减小了47.9%,但延迟时距及其离散性增加了15.5%和28.2%.
参考文献:
[1] 袁媛, 周宁芳, 李崇银. 中国华北雾霾天气与超强El Nino事件的相关性研究[J]. 地球物理学报, 2017, 60(1): 11.
YUAN Yuan, ZHOU Ningfang, LI Congyin. Correlation between haze in North China and super EI Nio events[J]. Chinese Journal of Geophysics, 2017, 60(1): 11.
[2] 王晶, 刘小明, 李德慧. 驾驶模拟器现状及应用研究[J]. 交通标准化, 2008(11): 160.
WANG Jing, LIU Xiaoming, LI Dehui. Driving simulator status quo and application research[J]. Communitions Standardization, 2008(11): 160.
[3] 涂辉招, 李振飞, 孙立军. 驾驶模拟器运动系统对自由驾驶行为的影响分析[J]. 同济大学学报(自然科学版), 2015, 43(11): 1696.
TU Huizhao, LI Zhenfei, SUN Lijun. Effects of motion system of driving simualtor on free driving behaviors[J]. Journal of Tongji University(National Science), 2015, 43(11): 1696.
[4] TU H, LI Z, LI H,etal. Driving simulator fidelity and emergency driving behavior[J]. Transportation Research Record: Journal of the Transportation Research Board, 2015(2518): 113.
[5] KANG J J, NI R, ANDERSEN G J. Effects of reduced visibility from fog on car-following performance[J]. Transportation Research Record: Journal of the Transportation Research Board, 2008(2069): 9.
[6] 何莎, 闫学东, 庞洪涛,等. 雾天对驾驶行为的影响研究——避撞驾驶行为[J]. 交通信息与安全, 2014, 32(5): 126.
HE Sha, YAN Xuedong, PANG Hongtao,etal. Effects of fog
conditions on driving behaviors-crash avoidance driving behaviors[J]. Journal of Transportation Information and Safety, 2014, 32(5): 126.
[7] EVANS L. Traffic safety and the driver[C]∥World Congress of the International Association for Accident and Traffic Medicine. Singapore: Science Serving Society,1995: 256-256.
[8] CAVALLO V. Perceptual distortions when driving in fog[C]∥Proc 2nd International Conference on Traffic and Transportation Studies. Shanghai:[s.n.], 2002:965-972.
[9] ZHOU W. Analysis of distance headway[J]. Journal of Southeast University, 2003, 19(4): 378.
[10] HOOGENDOORN R, TAMMINGA G, HOOGENDOORN S P,etal. Longitudinal driving behavior under adverse weather conditions: adaptation effects, model performance and freeway capacity in case of fog[C]∥Intelligent Transportation Systems (ITSC), 2010 13th International IEEE Conference on.[S.l.]:IEEE,2010: 450-455.
[11] ZHANG X, BHAM G H. Estimation of driver reaction time from detailed vehicle trajectory data[J]. MOAS, 2007(7): 574.
[12] BELLA F. Parameters for evaluation of speed differential: contribution using driving simulator[J]. Transportation Research Record: Journal of the Transportation Research Board, 2007(2023): 37.
[13] REYNER L, WELLS S J, MORTLOCK V,etal. “Post-lunch” sleepiness during prolonged, monotonous driving—effects of meal size[J]. Physiology & Behavior, 2012, 105(4): 1088.
[14] YANG Q, OVERTON R, HAN L,etal. The influence of curbs on driver behaviors in four-lane rural highways—a driving simulator based study[J]. Accident Analysis & Prevention, 2013(50): 1289.
