全球参考站网窄巷非校准相位延迟产品时变特性
2018-05-04王思遥李博峰
王思遥, 李博峰
(同济大学 测绘与地理信息学院, 上海 200092)
精密点定位(PPP)技术在无需参考站的前提下为全球用户提供厘米级定位服务.在过去10余年中,该技术得到了学界深入系统的研究,其应用已从位置服务扩展到大气变化监测、地震学和板块移动等科学领域[1-4].传统PPP算法仅凭单站无法消除浮点模糊度中的卫星初始相位偏差与硬件延迟,模糊度不具有整数性,必须耗费数10 min使得浮点模糊度收敛.为了缩短收敛时间,模糊度固定(ambiguity resolution,PPP-AR)技术应运而生.该技术根据参考站网观测数据解算卫星硬件延迟产品并发送给用户,用户使用该产品对模糊度进行改正,改正后的模糊度等价于差分定位模式中的双差模糊度,已具备整数特性,可被固定从而得到精确位置解.
由于PPP使用无电离层组合(IF)观测值,用户端的模糊度固定一般采用如下方案:先利用宽巷改正信息固定宽巷模糊度,再通过无电离层组合模糊度和固定的宽巷模糊度解算窄巷模糊度,最后利用窄巷改正信息固定窄巷模糊度.对于卫星硬件延迟UPD(uncalibrated phase delays)的解算,诸多学者提出了策略,具有代表性的有Collins等[5]提出的耦合钟法和Laurichesse等[6]提出的整数相位钟法,均将卫星端相位硬件延迟和卫星钟差合并,在无电离层组合观测方程中估计“整数相位钟”,但它们的宽巷硬件延迟解算策略并不相同,可参考文献[5-6].整数钟法与耦合钟法的最大缺陷是要求所有参考站观测值联立求解,这对服务器的数据处理效率有较高要求.第3种被广泛认可的硬件延迟解算策略是Ge等[7]提出的UPD法.该方法通过对宽巷与窄巷模糊度分别求取小数部分均值得到UPD改正数.由于该方法对参考站观测数据实行各站分散式解算,有效地缓解了服务器计算压力.上述3种方法在模糊度整数特性恢复、必要改正数选取和参数等价性等方面的详细比较可参阅文献[8].
针对基于UPD产品的PPP-AR技术,近10年间有不同学者从理论与应用方面进行了大量有意义的研究[7,9-10].参考站发送给用户的UPD产品分为宽巷与窄巷两类,用户收到产品后依次改正并固定宽巷与窄巷模糊度.经宽巷UPD改正后的宽巷模糊度一般仅需几分钟即可被固定.文献[11]详细分析了站、星宽巷UPD的时变特性,指出卫星宽巷UPD具有很高的稳定性,在卫星可视周期内,经过一段时间收敛后稳定于一常数值.因此提高其播发频率对用户定位效率的提升实际上非常有限.而窄巷波长较短,理论上相比宽巷模糊度随时间变化的速度要快得多,它的可用性和时效性对用户端模糊度固定效率和定位精度均有显著影响,因此对其时变特征进行分析有助于服务器确定合适的窄巷UPD播发频率.在不影响用户使用效果的前提下降低播发频率对缓解通讯压力颇有裨益.另外,分析窄巷UPD的时变特性也具有用户端实际应用的参考价值.例如当用户由信号良好区域进入暂时无法实时接收UPD产品的区域时,只能使用进入该区域前最后接收的一组UPD产品进行定位.由于窄巷UPD随时间实时变化,这组UPD能够使用的最长时间就决定了用户在通讯受阻地区的定位效率.
本文在介绍非差UPD估计的基本原理的基础上,利用全球108个IGS站的观测数据解算了宽巷与窄巷UPD产品,讨论了窄巷UPD产品的时变特性及其影响因素.最后,用实际观测数据模拟不同UPD延迟进行了PPP-AR解算实验,分析了窄巷UPD产品的可用性时限.
1 非差UPD产品解算
UPD是包含卫星及接收机端未检校的初始相位偏差和硬件延迟等偏差的综合误差.在传统PPP解算中,UPD造成的模糊度非整周部分不能和整数模糊度分离,这导致PPP模糊度为浮点值,破坏了模糊度的整数性,为固定模糊度制造了障碍.Ge等[7]提出的UPD改正方法是采用一定数量的参考站网先后估算卫星宽巷与窄巷UPD改正数,发送至用户后由用户对星间单差模糊度进行整数特性恢复.文献[9]对上述方案进行了改进,介绍了非差UPD产品解算方法.
传统PPP算法采用消电离层组合(IF)求解参数,考虑接收机与卫星端UPD,伪距与相位IF方程为
(1)
(2)


(3)

(4)


(5)
式中:In和en分别为n维单位矩阵和n维元素全为1的列向量.该方程观测值数共rs个,而未知数有rs+r+s个,包括rs个整周模糊度,r个接收机UPD和s个卫星UPD,故该方程秩亏,需要固定基准消除秩亏得到唯一解.首先将所有rs个模糊度作为整数基准固定,整数基准确定的详细过程可参考文献[13-14].需要说明的是,所谓“整数模糊度基准”无须等于浮点模糊度对应的整周模糊度.在用户端,UPD产品基准将被消除,模糊度基准加减整数并无影响.整周模糊度基准确定后可视为已知值,将其移动到等式左边,式(5)改写为
(6)
由于卫星与接收机UPD参数仍然不可分离,该方程依然秩亏.可将任意一个接收机的UPD设置为零以消除秩亏.之后方程组所有参数可估,采用最小二乘法估计剩余的UPD参数.非差UPD产品解算过程中多次指定非差基准,但用户端使用过程中采用了星间单差观测值,故基准的选取实际不会改变用户的解算结果.
(7)
各参考站独立完成窄巷浮点模糊度解算后,将其汇总联立,按照式(4)、(6)方法求解窄巷UPD产品,按照固定格式输出后即可播发给用户.
需要指出的是,式(6)可用于求解宽巷或窄巷UPD,本文基于这一方法生成非差UPD产品.Ge等[7]提出的UPD估计方法与本文略有不同,他将所有测站相同卫星单差模糊度小数部分的均值作为UPD参数估值,如式(8):
(8)
式中:frac()表示取模糊度小数部分;k、l表示星间单差的2颗卫星.可见Ge等[7]解算的UPD产品是星间单差形式的;本文所述方法所用最小二乘估计策略保留了不同UPD参数间的相关性,比直接取平均在理论上更为严密.
2 实验数据与评价指标
PPP-AR服务的参考站数量与范围亦与服务质量相关.选择全球分布参考站网可以随时观测到所有卫星,理论上可为全球任意位置的用户服务.本文实验数据来源于IGS全球观测网中的108个测站,分布如图1.
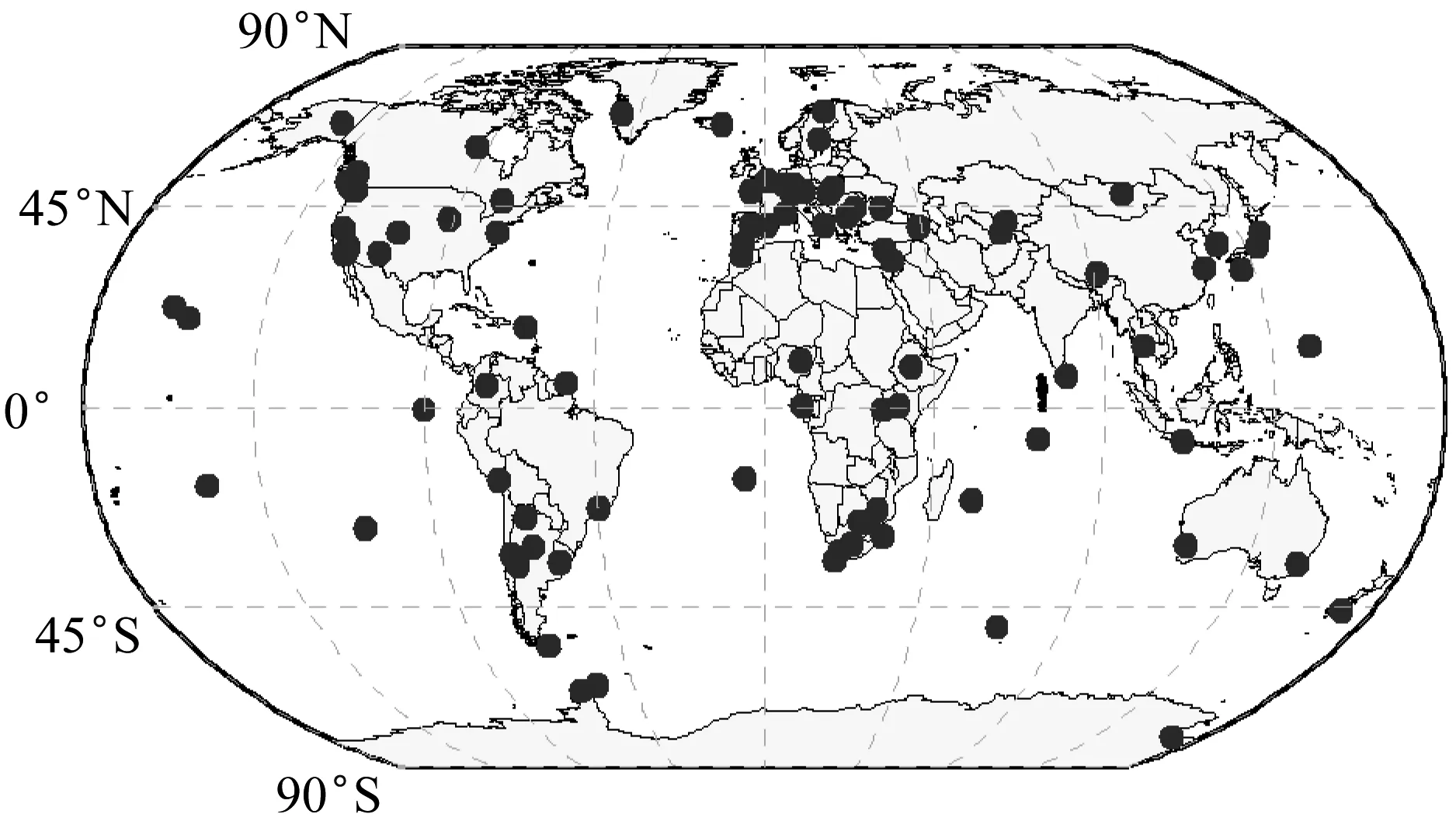
图1 实验数据来源Fig.1 Source of the experimental data
观测数据为2016年6月30日起连续7 d、历元间隔30 s的GPS数据.用以模拟用户站进行PPP-AR解算的4个IGS站分别位于日本鹿儿岛县(GMSD)、美国夏威夷(KOKB)、德国波茨坦(POTS)和法兰克福(FFMJ).
在用户端PPP-AR的模拟试验中,为了统计全天的整体定位效果,观测数据每隔10 min进行1次模拟重启解算,每次解算使用1 h的观测数据并最终得到一个浮点解或固定解.实验中在每个历元尝试固定高度角高于10°的所有卫星的模糊度,使用模糊度检核系数(ratio)大于3作为模糊度是否固定的检核标准.若1 h内无法通过ratio检验,则认为固定失败,固定失败率fun定义为
式中:nf表示可以固定解的数量;na表示全部解的数量.将首次固定历元的固定坐标解和已知精确坐标进行对比,若平面误差大于0.1 m或高程误差大于0.2 m,则认为模糊度固定错误,固定错误率fwr定义为[15]
式中:nwr表示错误固定解的数量.另外,首次固定所需观测时间(TTFF)也是衡量模糊度固定效率的重要指标,本文仅对“正确固定”的模糊度统计其TTFF.平均TTFF将与前2项指标一起用以综合评价UPD产品的时间可用性.
3 窄巷UPD的周变化
为了直观地观察窄巷UPD随时间的变化范围,利用软件解算了2016年6月30日起7 d的全球参考站网非差窄巷UPD产品,其中2组卫星对的单差UPD见图2,历元间隔为30 s,DOY表示年积日.
图中UPD进行单差处理是为了避免因基准变换发生跳变而对分析UPD稳定性造成影响.可以发现:① UPD在每天零时发生明显跳变后又快速稳定于某值,这展现了滤波重启后的收敛过程,收敛后的单日变化量最大值出现在G27~G11单差UPD的第3 d,如图2标出所示,达到了0.6周.② UPD每天随时间变化的趋势类似.这说明UPD内包含以天为单位规律性变化的系统误差,即式(5)中的ε项,其主要成分可能为未被恰当模型化的对流层延迟残差[16].③ UPD在跨天的时刻发生明显的阶跃.究其原因,其一可能是UPD参数受到其吸收的时变性系统误差的影响而变化,在UPD解算时使用的单日序贯弧段滤波可能会造成零点时的结果不统一;其二可能是继承于IGS钟差的每日间阶跃,G25与G26卫星7 d内的IGS钟差如图3所示.为了表达简洁,图示钟差已沿纵坐标平移以消除零阶大值,同时已减去一阶趋势项.
图3所示钟差跨天时刻阶跃(也有文献称作天跳变)在纳秒量级.虽然初始相位偏差在不关机的情况下不会变化,但伪距硬件延迟具有随时间变化的特性.而IGS的星历与钟差是以天为单位弧段进行滤波解算的[17],滤波在每日零时重置便会造成与前一天结果的不统一.PPP浮点模糊度吸收了钟差中的伪距硬件延迟部分,故UPD也随之发生阶跃.该阶跃的存在使得使用IGS钟差和UPD产品的用户必须在GPS时间每日零点重置PPP滤波,否则将造成模糊度参数有偏.

a G27-G11卫星对
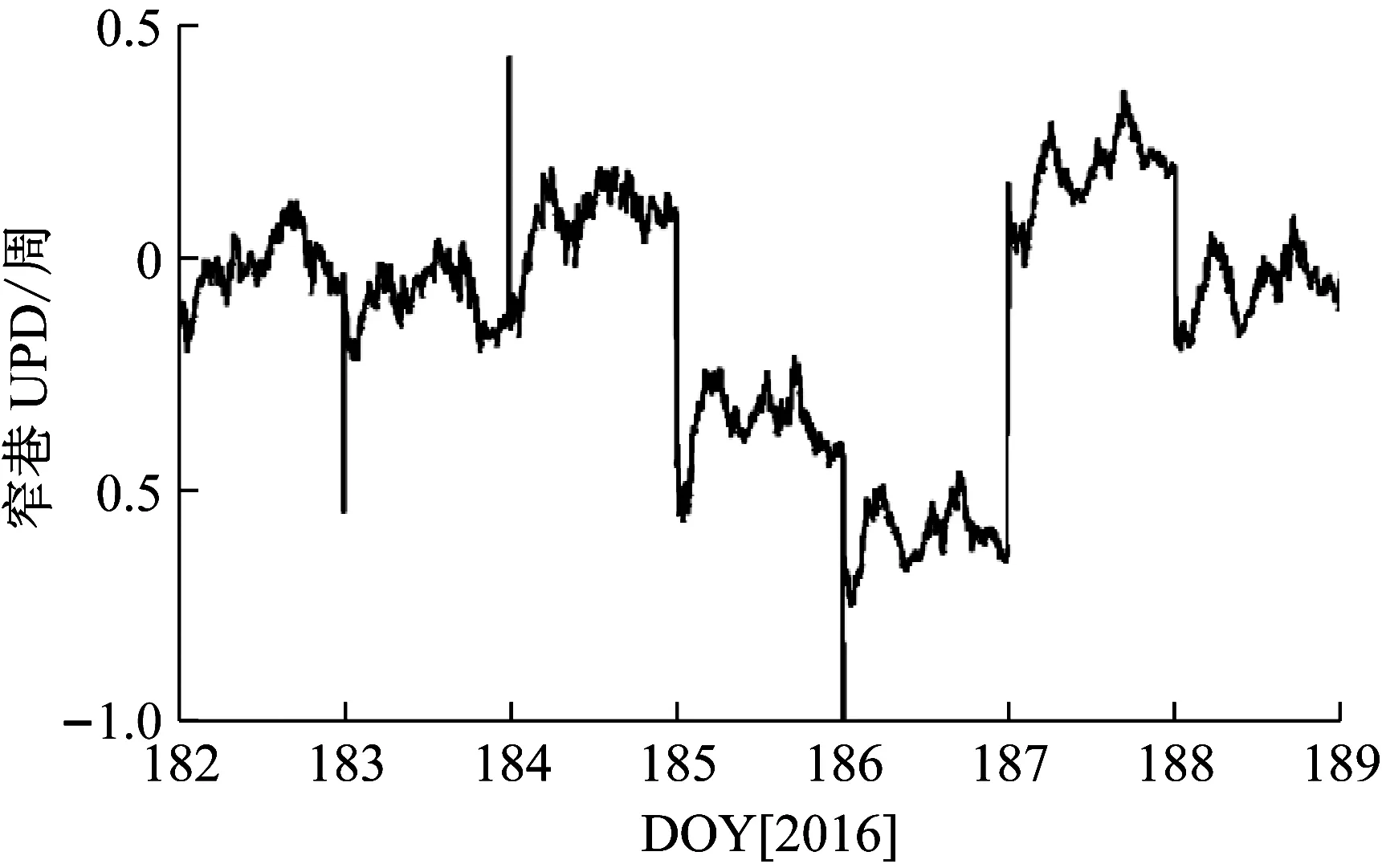
b G14-G6卫星对图2 2组卫星对的一周单差窄巷UPDFig.2 Single-differenced NL-UPD of two pairs ofsatellites in a week

图3 2颗卫星的一周钟差Fig.3 Clock error of 2 satellites in a week
UPD参数是由式(4)通过最小二乘解得的,自身也是随机量,其参数精度与所用到参考站的数量和观测值质量有关.在认为UPD参数无偏的前提下,中误差反映了UPD的解算质量.2016年6月30日全天所有卫星非差UPD的中误差均值如图4.

图4 非差UPD的中误差均值Fig.4 Mean standard deviation of zero-differenced UPD
图中G4卫星结果缺失是由于其IGS精密轨道未提供,其余所有卫星窄巷UPD平均中误差数值接近,均在0.023至0.026周之间,反映了全球参考站网解算窄巷UPD的精度水平一致且较高.
4 UPD产品在用户端的使用误差
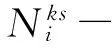
PPP用户模糊度能否固定不只与UPD产品质量有关,用户端浮点模糊度的解算质量也是影响其固定的重要因素.

(9)

(10)

(11)
再将式(4)代入,式(11)改写为
(12)

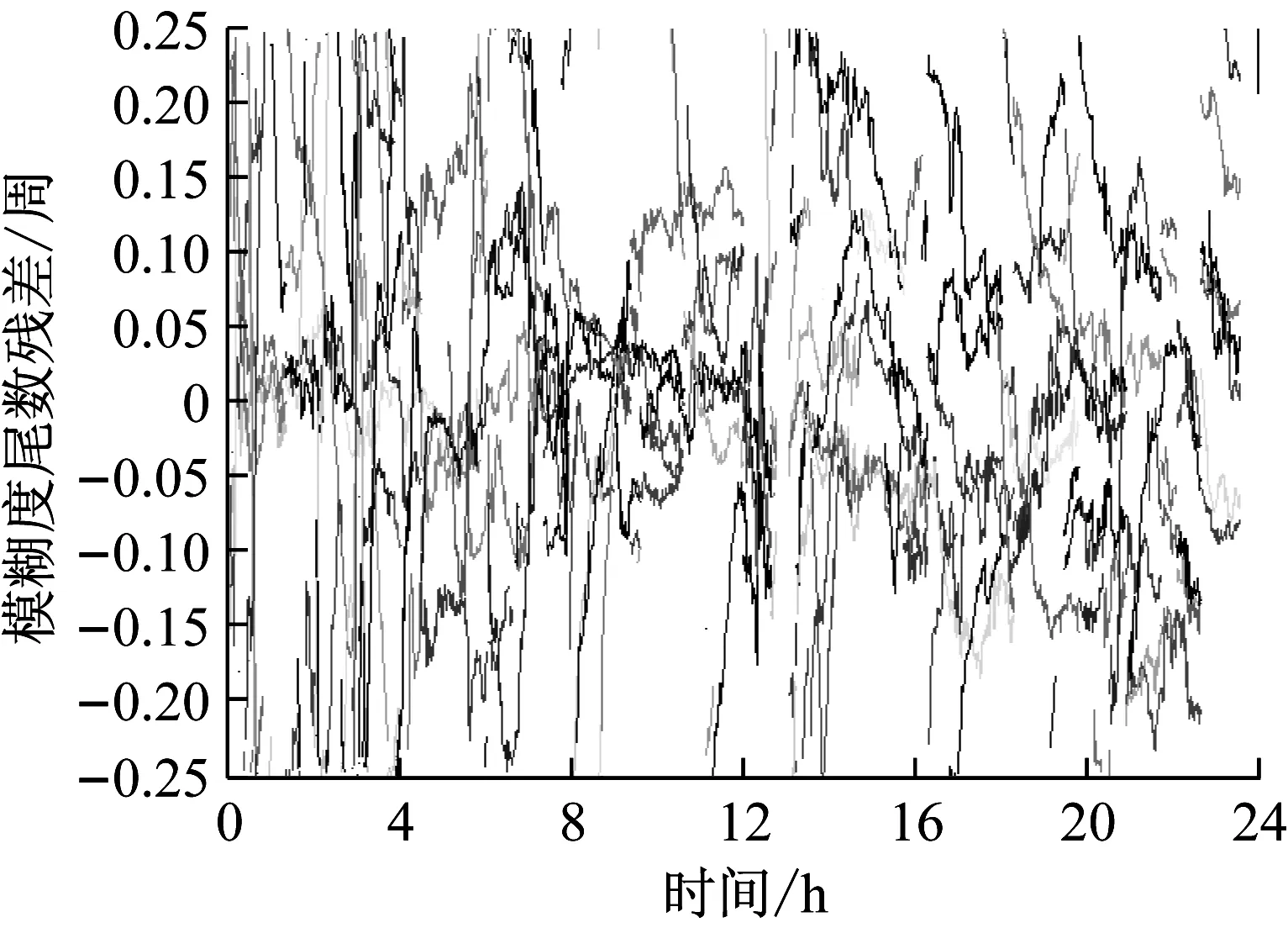
a GMSD站
b POTS站图5 2个IGS站经UPD改正后的模糊度小数残差Fig.5 Ambiguity residuals of 2 IGS stations aftercorrected with UPD products

5 窄巷UPD产品的时效性分析
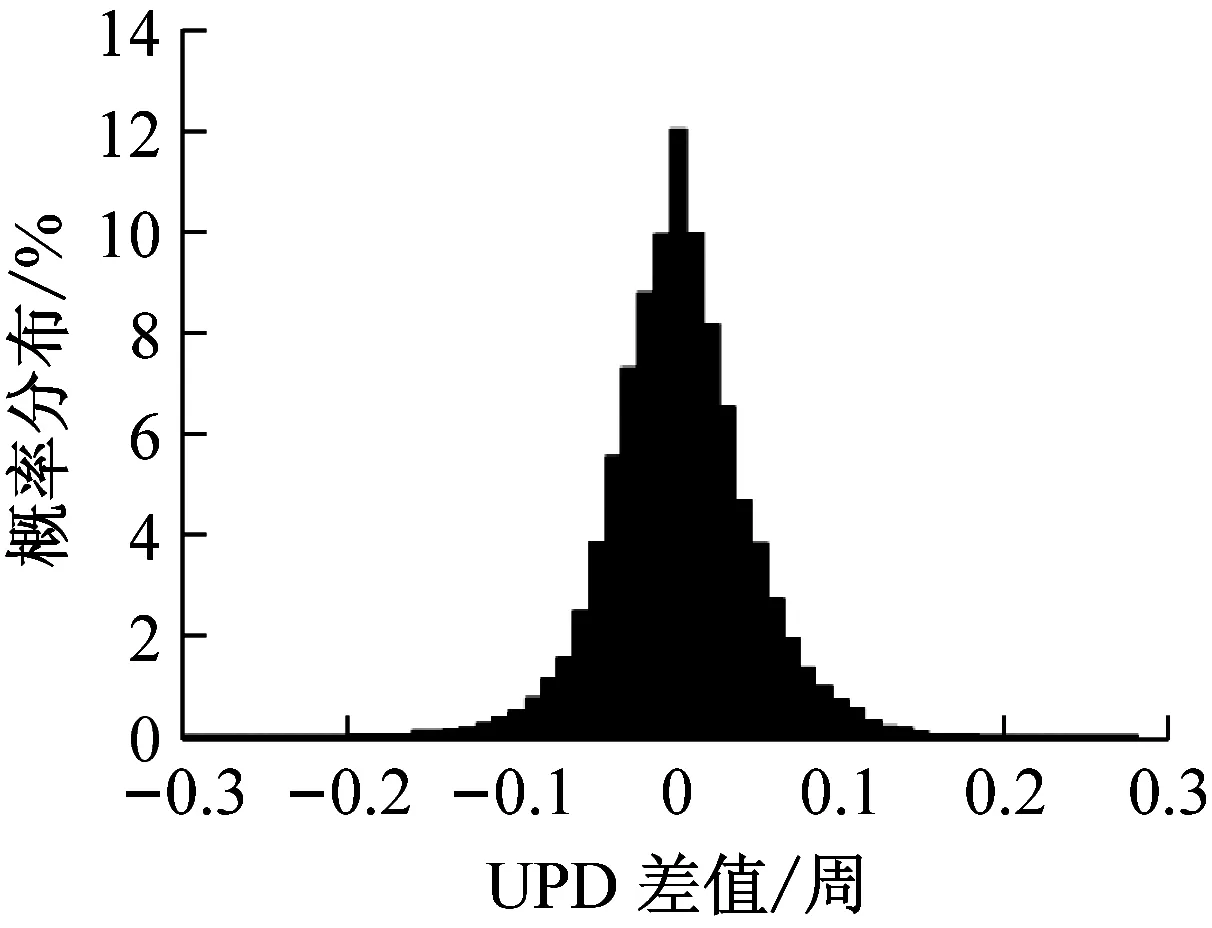
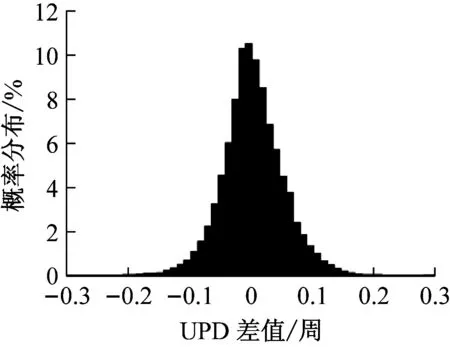
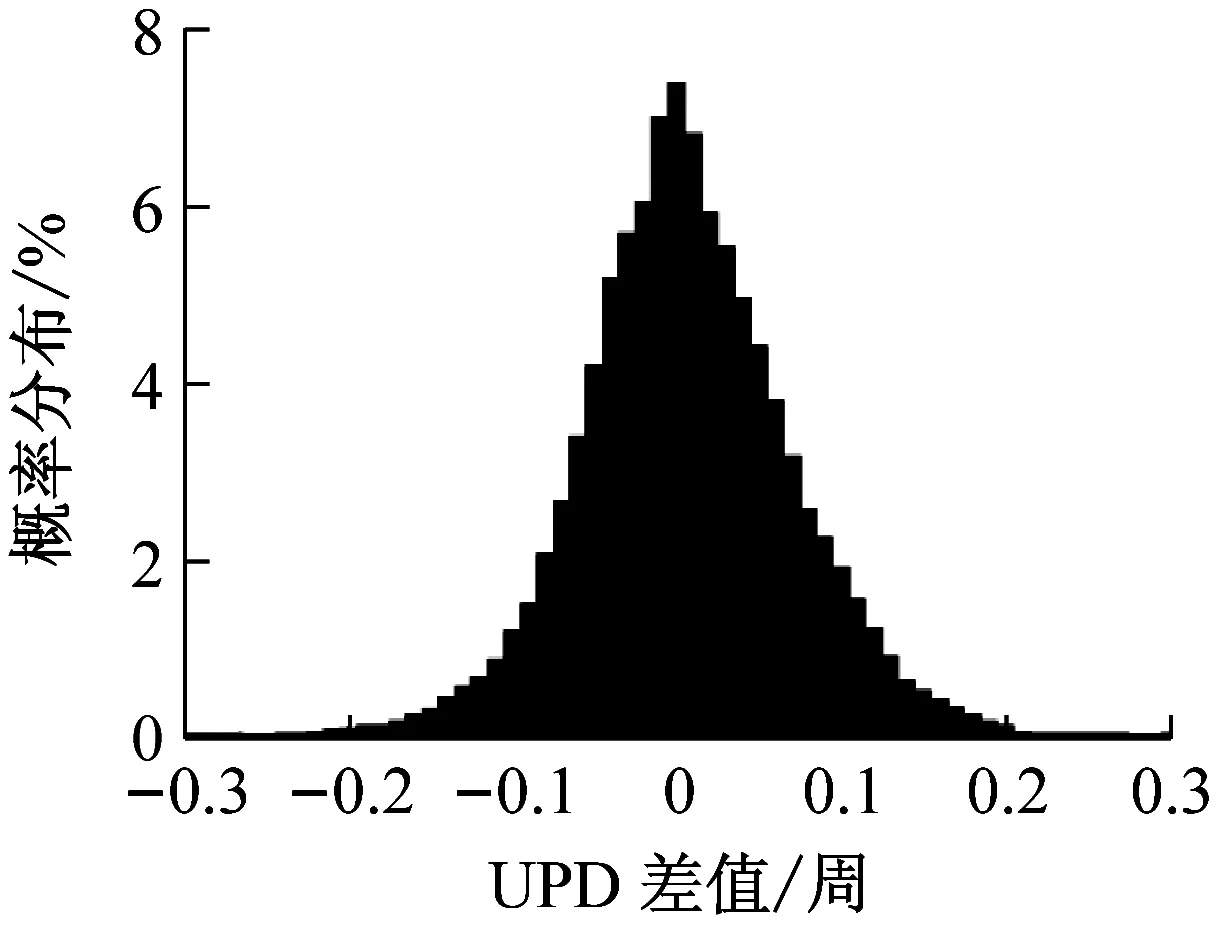
研究UPD产品的使用时效问题可以为参考站产品播发和用户使用提供参考.首先,为了了解不同时间间隔内UPD的变化程度,对UPD产品在不同时间间隔内变化量的分布率进行了统计.图6为逐历元统计一星期内所有卫星UPD不同间隔时间变化量的概率分布直方图,表1为统计结果.可见无论时间间隔长短,UPD变化量的均值都非常小,在10-3量级.不同时间间隔的UPD变化量概率分布直观上符合正态分布特征,在零附近出现峰值并随着差值绝对值的增大概率逐渐减小.即使间隔时间达到120 min,变化量也基本不超过±0.3周.随着间隔时间的增长,变化量标准差和绝对值均值均随之增长.间隔为10 min时,标准差为0.025周,平均差值绝对值为0.015周;间隔时间为60min时,该2项数据分别为0.062和0.042周;而当间隔时间达到120 min时,2项数据分别达到0.080和0.061周.这说明如果使用过早前的UPD产品,会有多个UPD改正数信息与其对应模糊度的小数部分存在较大差距,将造成模糊度参数存在系统性偏差,可能导致模糊度固定失败.

a 10 min

b 30 min
c 45 min
d 60 min
e 90 min

f 120 min图6 不同间隔时间窄巷UPD变化量概率分布Fig.6 Probability distribution of NL UPD differences over different latency time表1 不同间隔时间窄巷UPD变化量统计结果Tab.1 Statistical results of NL UPD differences overdifferent latency time
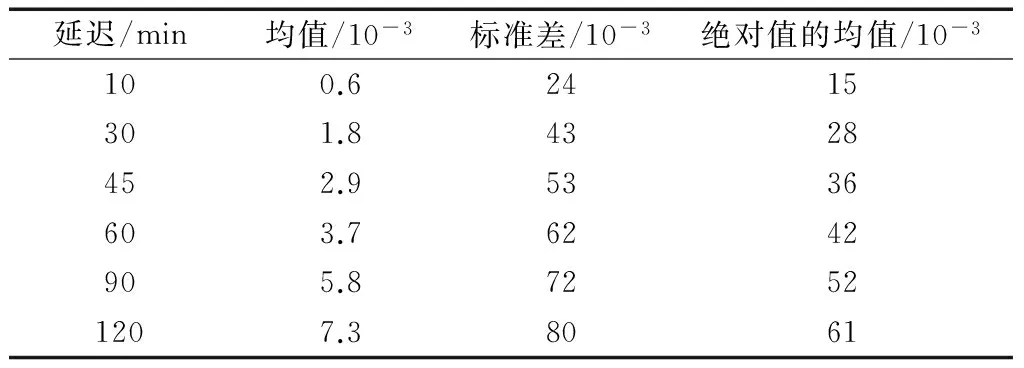
延迟/min均值/10-3标准差/10-3绝对值的均值/10-3100.62415301.84328452.95336603.76242905.872521207.38061
为了更为深入地探究UPD产品延迟时间与用户模糊度固定质量的关系,需要以真实观测数据解算结果验证UPD延迟时间的影响,即以模糊度固定效果来确定UPD产品的可用性时效.实验利用4个IGS站的实测数据以不同UPD延迟时间进行静态PPP-AR解算.4个模拟用户站的分布、模糊度固定评价指标及实验方法参照第2节所述.通过处理连续7 d的观测数据获得解算结果,4个用户站平均固定失败率fun和平均固定错误率fwr如图7,正确固定解的平均TTFF如图8.
该实验中,随着UPD延时从零增加至120 min,除GMSD站外的3个测站平均TTFF均略微增加,增加幅度约5个历元.各站的平均TTFF水平存在差异,这与测站所处地理位置和观测环境有关.除此以外,120 min延迟的平均fun相比于零延迟有明显增加趋势,增幅达到12%~18%,同时平均fwr增加3%~8%,可见UPD产品若不及时更新,用户的模糊度固定效率将随着UPD的时延增加而降低.从时效性的角度来看,当使用30 min前的UPD产品时,相对于零延迟产品仅有GMSD站fun增加了约5%,其余3站均在1%~3%之间,而fwr增加约1%~2%;而当延迟时间为45 min时,GMSD站fun相比于零延迟增幅达到11%,POTS和KOKB站的fun也均有较大幅度上升并呈现快速增长趋势,同时各站fwr也有最大达到3%的增加.较为特殊的是FFMJ站,当延迟时间为60 min后,fun才可被发现快速增加.另外需要指出的是,本实验中每个历元在模糊度固定时均使用固定延迟时间之前的UPD,即体现的是播发间隔时间内的最后一个观测历元的产品使用效率.实际播发产品时,用户端UPD延迟时间随着观测时间的推移由零增长至规定的延迟上限后便可接收到下一批次UPD产品,故实际使用效果应当优于本实验算例.综合以上分析结果,兼顾数据传输与UPD产品的可靠性,建议的全球参考站网窄巷UPD产品有效时限即产品播发最长间隔时间为30 min.
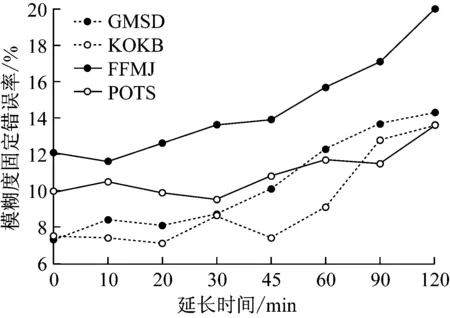
a 固定错误率

b 固定失败率图7 4个IGS站不同时间延迟PPP-AR实验统计结果Fig.7 Statistical results of PPP-AR of the 4 IGSstations with different latency time

图8 4个IGS站不同时间延迟的平均TTFFFig.8 Average TTFF of the 4 IGS stations withdifferent latency time
6 结 语
利用全球108个IGS测站连续7 d的观测数据,生成了相应的全球参考站网宽巷与窄巷UPD产品,分析了窄巷UPD产品的变化范围,发现窄巷UPD单天最大变化量可以达到0.6周.之后由用户端经UPD改正后的模糊度残差说明了用户模糊度固定受到未模型化残余模型误差的影响.在PPP-AR解算实验部分,利用4个IGS站进行了不同延迟状态下UPD产品的可用性时效实验,采用模糊度固定失败率、模糊度错误固定率和首次固定时间作为指标评估固定效果.实验结果表明,UPD产品若不及时更新,用户的模糊度固定效率将随着时间的增长越来越低.如果延迟达到2 h,4个实验站模糊度固定失败率将达到28%~36%,而固定错误率也达到13%~20%.通过比较7种不同延迟的UPD产品使用效率的实验结果,推荐全球参考站网窄巷UPD产品有效时限不大于30 min.
参考文献:
[1] ROCKEN C, JOHNSON J, HOVE T V,etal. Atmospheric water vapor and geoid measurements in the open ocean with GPS[J]. Geophysical Research Letters, 2005, 32(12):12813.
[2] CALAIS E, HAN J Y, DEMETS C,etal. Deformation of the North American plate interior from a decade of continuous GPS measurements[J]. 2006, 111(B6):6402.
[3] LI X, GE M, ZHANG Y,etal. Real-time coseismic displacements from tightly-integrated processing of high-rate GNSS and strong motion data[C]// European Geosciences Union General Assembly 2013. Vienna: [s.n.], 15:8302-1.
[4] KAO S P, CHEN Y C, NING F S. A MARS-based method for estimating regional 2-D ionospheric VTEC and receiver differential code bias[J]. Advances in Space Research, 2014, 53(2):190.
[5] COLLINS P, LAHAYE F, HEROUX P,etal. Precise point positioning with ambiguity resolution using the decoupled clock model[C]// Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation. Savannah: [s.n.], 2008:1315-1322.
[6] LAURICHESSE D, MERCIER F, BERTHIAS J P,etal. Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination[J]. Navigation, 2009, 56(2):135.
[7] GE M, GENDT G, ROTHACHER M,etal. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations[J]. Journal of Geodesy, 2008, 82(7): 389.
[8] SHI J, GAO Y. A comparison of three PPP integer ambiguity resolution methods[J]. GPS Solutions, 2014, 18(4):519.
[9] LI X, ZHANG X. Improving the estimation of uncalibrated fractional phase offsets for PPP ambiguity resolution[J]. Journal of Navigation, 2012, 65(3): 513.
[10] LI P, ZHANG X, GUO F. Ambiguity resolved precise point positioning with GPS and BeiDou[J]. Journal of Geodesy, 2017, 91(1): 25.
[11] 张小红, 李盼, 李星星,等. 宽巷载波相位模糊度小数偏差时变特性分析[J]. 测绘学报, 2013, 42(6):798.
ZHANG Xiaohong, LI Pan, LI Xingxing,etal. An analysis of time-varying property of widelane carrier phase ambiguity fractional bias[J]. Acta Geodaetica et Cartographica Sinica, 2013,42(6):798.
[12] GENG J, MENG X, DODSON A H,etal. Integer ambiguity resolution in precise point positioning: Method comparison[J]. Journal of Geodesy, 2010, 84(9):569.
[13] LI X, GE M, ZHANG H,etal. A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning [J]. Journal of Geodesy, 2013, 87(5):405.
[14] LI Y, GAO Y, SHI J. Improved PPP ambiguity resolution by COES FCB estimation[J]. Journal of Geodesy, 2016, 90(5):437.
[15] LI B, SHEN Y, FENG Y,etal. GNSS ambiguity resolution with controllable failure rate for long baseline network RTK[J]. Journal of Geodesy, 2014, 88(2):99.
[16] ZHANG Z, LI B, SHEN Y. Comparison and analysis of unmodelled errors in GPS and BeiDou signals[J]. Geodesy and Geodynamics, 2016, 8(1):41.
[17] 郭向欣, 李敏. IGS精密钟差天跳变影响及消除方法研究[C]∥2014年第五届中国卫星导航学术年会电子论文集.南京:[s.n.],2014:133-137.
GUO Xiangxin, LI Min. Research of IGS precise clock offset day boundary effects and eliminating methods[C]// China Satellite Navigation Conference 2014 Proceedings. Nanjing:[s.n.], 2014:133-137.
