一种新型高旋弹体滚转角测量系统*
2018-05-03许廷金杜思远魏晓凯张佳宇
许廷金,李 杰,杜思远,郑 涛,魏晓凯,张佳宇
(中北大学电子测试技术重点实验室,太原 030051;)
微惯性导航技术由于其自身独特优势,被国内外普遍认为是不可或缺的重要导航制导组件,常规弹药在飞行过程中通常会保持较高的滚转角速率以及较大的轴向发射过载,当微机电(MEMS)惯性测量系统应用于此类弹药时,弹体的高速旋转对系统中传感器的量程提出更高要求,但由于工艺限制,MEMS传感器量程增大而其精度性能相应降低,使得捷联式惯性测量系统无法准确测量弹体滚转角速率[3-4],目前弹体滚转角测量一般采用捷联式惯性测量平台,这种测量方法由于使用的传感器量程较大,造成后期解算滚转角精度不高,给弹体实施制导和修正控制带来困难,因此迫切需要一种提高高旋弹体滚转角测量精度的方法[5]。
针对上述问题,中北大学设计了一种新型的半捷联惯性测量平台[6]。该平台通过特殊的质量偏心装置使内部微惯性测量组合(MIMU)与弹体在俯仰和偏航轴保持捷联,在滚转轴保持相对稳定,实现了小量程、高精度的弹道测试[7]。然而由于滚转轴的相互隔离,MIMU不能直接获得弹体的滚转角信息。本文提出了一种通过在半捷联平台与弹体壳之间设置高精度转角测量装置(光电编码器)来测量二者之间的相对转角,然后结合半捷联惯性测量平台的测量信息,进而得出弹体的实际滚转角信息。这种方法解决了由于传感器量程增大测量精度减小的问题,即利用小量程MEMS传感器实现半捷联内筒信息测量,利用光电编码器测量内外筒相对转角,间接得出弹体滚转角信息。本文通过转换测量参数,经过后期数据融合,得出弹体滚转角信息,从而提高弹体滚转角测量精度。
1 弹体滚转角测量系统设计
半捷联惯性测量平台设计如图1所示,光电编码器与MIMU置于不与载体固连的内筒平台,内筒平台通过设计一定比例的配重使其形成适度的质量偏心。内筒平台利用偏心质量块形成的回复力矩克服由弹体滚转带动轴承产生的摩擦力矩,使得MIMU在滚转轴方向保持相对稳定[8]。光电编码器的定子固连在平台内筒,另一端转子设计机械卡槽与外筒连接,通过测量转子与定子的相对转动,获得内筒平台与外筒之间的相对转角。
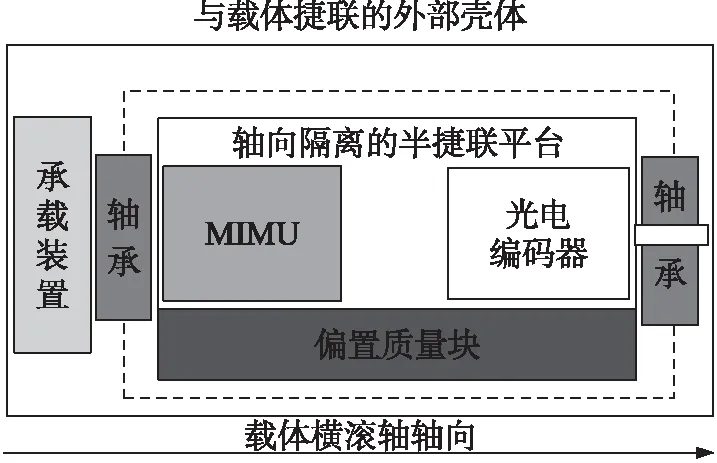
图1 半捷联惯性测量平台
平台内部MIMU输出代表内筒平台运动信息的电压值,光电编码器输出表示内、外筒相对转动的脉冲信号,由采集存储模块对两个信息进行高速计数、采集与存储。另外,在过载承受端设计其轴向承载装置,平台内部设计抗过载灌封工艺,提高系统的抗过载性能。
2 MIMU惯性测量单元
MIMU作为惯性测量系统的核心器件,是由3个MEMS陀螺仪和3个MEMS加速度计组成,其具有小体积、低功耗、抗高过载等优点,在小口径、高过载及高旋转的常规弹药上得到有效应用[9]。传感器分别安装在3个相互正交的轴系上,其安装示意图与实物图如图2所示,采集存储原理图如图3所示。

图2 MIMU惯性测量单元

图3 MIMU采集存储原理框图
本设计中,将MIMU的X轴作为滚转轴固定在半捷联内筒平台中心轴上,敏感载体的姿态位置信息,根据实际应用环境,弹体在飞行过程中偏航轴与俯仰轴姿态变化小,对传感器量程要求低;而滚转轴姿态处于高速变化状态,经半捷联平台减旋稳定后,平台内筒处于低速小幅往复摆动,考虑实弹环境下初始扰动的影响,选定传感器量程为300(°)/s的陀螺仪来测试内筒滚转角。
MIMU在实际安装中,不可避免的会产生安装误差角,使3个方向的传感器敏感轴不正交,为了提高系统的测量精度,对测量系统进行系统级标定实验,消除不正交误差。
3 光电编码器抗抖动干扰设计
增量式光电编码器以其小体积、低成本、高精度以及良好的动态性能,在高分辨率、大量程角速率/位移测量系统中得到广泛的应用[10]。设计中选用ELTRA系列编码器来测量半捷联内筒平台与弹体之间的相对转角信息,结合半捷联平台内部测量值共同得到弹体的滚转角,选用的光电编码器型号为:EL63D400Z8/24L10X3PR,其实物图如图4所示。半捷联平台经过轴向隔离稳定,其内部选用小量程、高精度MEMS陀螺仪测量平台的转动信息,可以解算得到精确的滚转角,但由于光电编码器对抖动干扰非常敏感,如果在计数过程中缺少有效的抗干扰能力,测量结果将会出现较大误差,从而降低弹体滚转角的计算精度。因此,需要对光电编码器采集的信号进行抗干扰处理,得到精确的滚转角信息。

图4 光编实物图
3.1 增量式光电编码器抖动信号产生机理
增量式光电编码器在测量时有A、B、Z3路输出信号,编码器每转一周,Z信号输出一个脉冲,表示编码器一周的零位;A、B两路信号输出固定数目的脉冲信号,且两路信号相互正交,用以判断光电编码器的旋转方向和计算被测物体的转动角度。当A相超前B相90°时,表示编码器正转;当B相超前A相90°时,表示编码器反转[11],如图5所示。
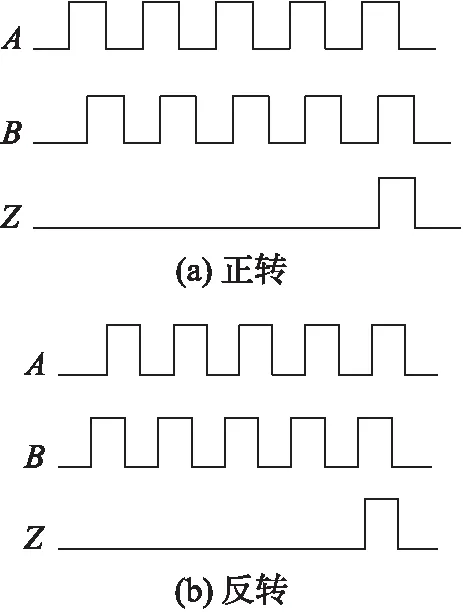
图5 光电编码器输出信号
在实际应用过程中,半捷联平台在合力矩作用下保持小幅往复摆动,由于弹体飞行过程中的角运动以及轴承间隙与安装误差的存在,使得半捷联平台在运动过程中出现机械振动。光电编码器通过旋转轴与外筒相连,轴系引起的机械抖动造成编码器转轴转动不稳,对其脉冲输出产生极大干扰,从而引起计数误差。
此时,在平台运转过程中,光电编码器输出脉冲抖动主要表现为在透光窗边沿附近发生小幅抖动引起的干扰脉冲以及编码器转轴在某一点前后振动引起的误计数。光电编码器抖动脉冲输出波形如图6所示,图6(a)表示编码器脉冲信号在上升沿或下降沿发生不稳定性抖动的波形;图6(b)表示编码器在某一点附近产生前后振动的输出波形。
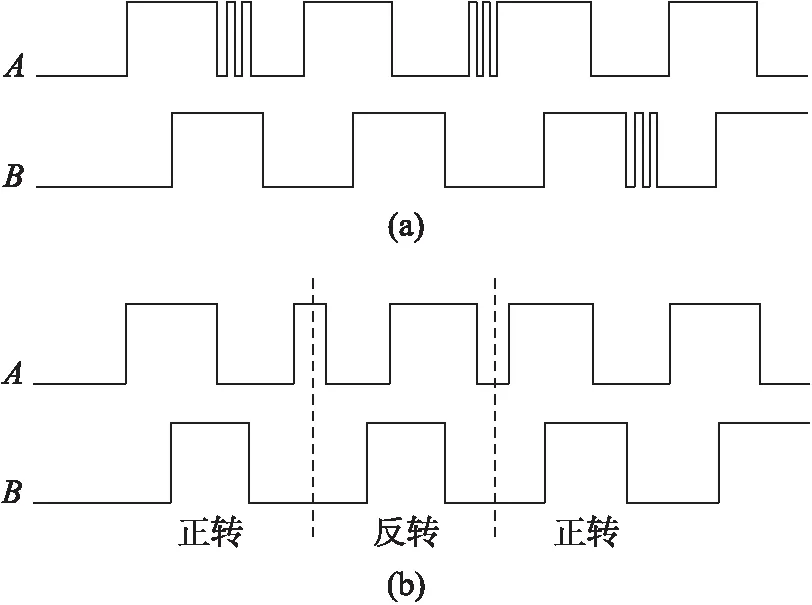
图6 光电编码器抖动脉冲输出
3.2 消除抖动计数误差方法
本设计选用的光电编码器的分辨率为2 048,对应角度分辨率为0.176°。在弹体飞行过程中,半捷联平台处于低速摆动状态,因此光电编码器转轴主要由外部弹体带动,当弹体转速达到最大转速20 rot/s时,编码器脉冲的最大输出频率为41 kHz。
在对光电编码器进行计数采样时,针对图5所示,a类脉冲信号在上升沿或下降沿跳变所发生的不稳定抖动与毛刺,设计中采用定时方式进行消抖处理。依据采样定理,要实现数字信号的完整采集,信号的采样频率需大于输出频率的2倍以上[12],设计中采用5 MHz频率进行高频采样,利用计数器对输出高低电平的持续时间进行计数,当计数时间大于设定值时,认为该信号为正常信号,输出用于后续处理;否则为干扰信号,将其滤除。
b类脉冲干扰信号与正常信号的电平格式一致,由转轴在某点前后振动产生。当转轴发生前后振动时,干扰信号脉冲较窄,在跳变沿时刻对应的另一相脉冲信号的电平值不发生变化。针对该信号特点,设计中采用D触发器寄存相邻跳变沿时刻对应的另一相脉冲信号的电平值,并将两个时刻的电平值进行比较。若电平一致则为干扰信号;若不一致,则为正常信号,将脉冲进行计数。
Z信号作为编码器的零位信号,用于重置编码器的位置角,设计中将Z信号经定时方式处理后作为A、B两路信号的计数置零信号,将计数误差保证在每转以内,消除累积误差,提高计数精度。
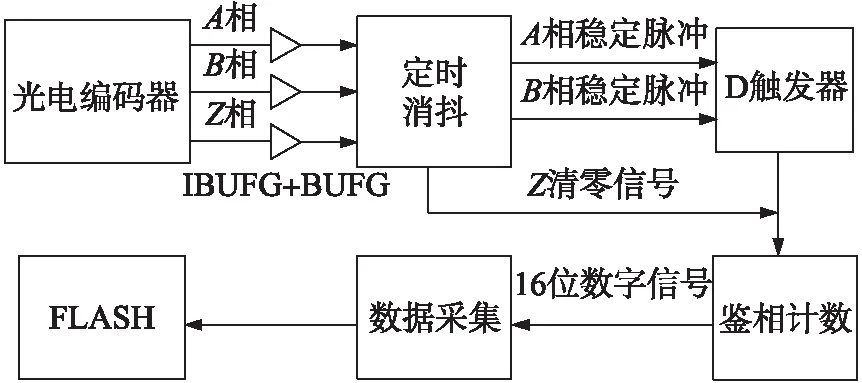
图7 光编采集存储原理框图
如图7所示,编码器输出脉冲信号经过定时采样与D触发器综合消抖后,对稳定脉冲信号进行鉴相计数,根据A、B两相脉冲相位相差90°,通过判定A相脉冲上升沿时刻B相脉冲的电平值即可确定编码器旋向,完成计数器的加减。
4 试验验证
为验证系统在高旋环境下本滚转角测量方法的有效性,在高速飞行仿真转台上进行验证试验。此外本次试验还在系统外筒底部放置一个大量程陀螺,用其直接测量弹体的滚转角速率,通过大量程陀螺解算出的滚转角与半捷联惯性测量系统解算值进行对比,进一步证明本设计的合理性。
本次试验利用高速飞行仿真转台模拟弹体高速旋转的环境,设置转台在偏航轴保持不变,俯仰轴从45°~-45°变化,滚转轴角速率为15 rot/s,采集记录相关数据参量。通过对比转台反馈回的滚转角度信息、大量程陀螺解算滚转角以及半捷联惯性测量平台解算滚转角,验证本设计的有效性,验证试验现场如图8所示。由于高速飞行转台反馈的滚转角信息为角增量形式,为了能够直观对比以上3种滚转角信息,统一将滚转信息化成角增量形式。如图9为由放置在外筒底部的大量程陀螺测出的外筒滚转角速率和转化后的滚转角增量图。
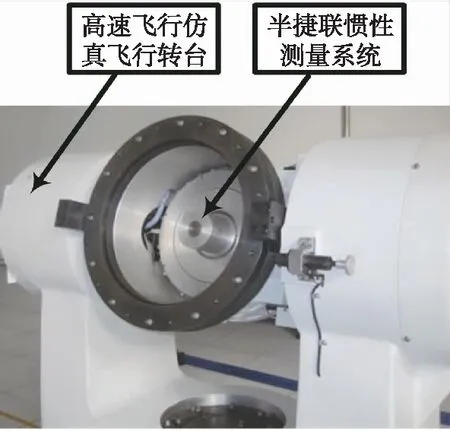
图8 飞行仿真试验现场图
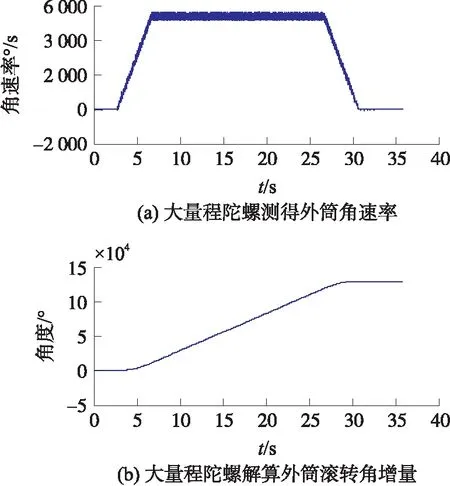
图9 大量程陀螺解算滚转角信息
半捷联惯性测量平台内筒MIMU测得滚转信息如图10所示,可以发现MIMU的滚转角速率维持在较低的值,偏心质量块起到了减旋作用,与设计相符。如图11为光编测得的内外筒相对转角及其局部放大图。根据光电编码器旋转方向,将半捷联平台内筒滚转角信息与光电编码器测得的相对转角信息进行信息融合即可得到外筒的滚转角,半捷联系统解算得到的外筒滚转角及其角增量如图12所示。
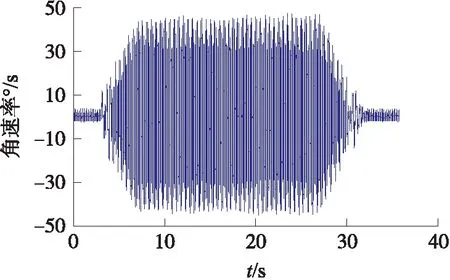
图10 MIMU测得滚转轴信息

图11 光编测得相对转角信息

图12 半捷联系统解算滚转信息
大量程陀螺解算滚转角增量、半捷联惯性测量平台解算滚转角增量与转台反馈滚转角增量对比图及其局部放大图如图13所示,将大量程陀螺解算滚转角增量和半捷联惯性测量系统解算滚转角增量分别与转台反馈滚转角增量做差,得到滚转角误差对比图如图14所示。

图13 滚转角增量对比图

图14 滚转角误差对比图
表1列出了不同试验时刻的滚转角误差值,从表中可以看出经半捷联惯性测量系统解算出的滚转角测量精度比直接用大量程陀螺解算出的滚转角精度提高了5倍,证明了本设计系统的合理性,为高旋弹体滚转角测量提供了一个可行的方法。
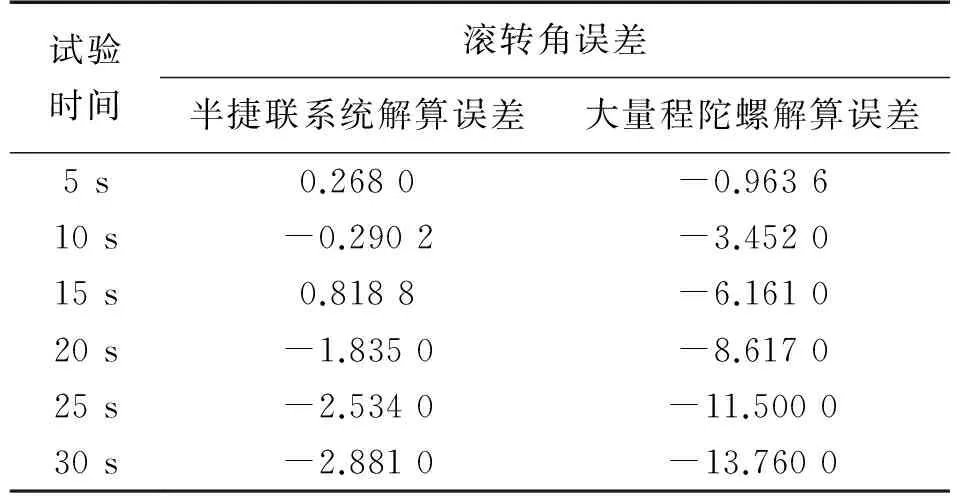
表1 滚转角误差对比 (°)
5 结论
针对利用常规方法测量高旋弹滚转角精度不高的问题,提出并设计了一种间接测量弹体滚转角的方法。该方法通过在弹体内筒放置一个MIMU惯性测量单元和光编,利用光电编码器测量弹体内筒与弹体之间的相对转角,通过后期数据融合,得出弹体滚转角信息。同时还设计了光编抗干扰抖动方法。高速飞行仿真转台验证了该测量系统设计的合理性。该测量系统克服了大量程陀螺测量滚转角精度不高的问题,能够满足弹体在高速旋转下的滚转角测量,具有很高的工程实用价值。
参考文献:
[1] 王涛,王海川,梁燊. 基于GPS载波相位差的炮弹滚转角测量方法[J]. 指挥控制与仿真,2014,36(01):71-73,83.
[2] 李杰,赵诣,刘俊,等. 高旋弹药飞行姿态测量用半捷联MEMS惯性测量装置研究[J]. 兵工学报,2013,34(11):1399-1400.
[3] 张伦东,练军想,吴美平,等. 单轴旋转惯导系统载体航向隔离方法研究[J]. 仪器仪表学报,2012,33(6):1247-1253.
[4] 吕清利. 图像制导弹药的弹载滚转稳定平台设计[D]. 南京:南京理工大学,2011.
[5] 李文豪,李杰,杨文卿,等. 适用于主动式半捷联的伺服电机多级控制调速方法[J]. 传感技术学报,2017,30(9):1369-1374.
[6] 刘俊,李杰,张文栋,等. 一种适用于高转速飞行体姿态测量的半捷联式结构:中国,201110025476.7[P]. 2011-09-07.
[7] 段晓敏,刘俊,李杰,等. 制导炮弹用半捷联式惯性导航系统平台设计与实验[J]. 导弹与航天运载技术,2014(3):20-23.
[8] 段晓敏,李杰,刘俊. 被动式半捷联平台的动力学模型及其稳定性分析[J]. 兵工学报,2014,35(09):1436-1442.
[9] 张松,李杰,赵诣,等. 半捷联MEMS惯性测量装置数据硬回收系统设计[J]. 传感技术学报,2013,26(9):1219-1223.
[10] 祝敬德,李杰,王丽平,等. 基于光电编码器的相对转角测量系统[J]. 测试技术学报,2015,29(2):145-148.
[11] 王显军. 光电轴角编码器细分信号误差及精度分析[J]. 光学精密工程,2012,20(2):379-386.
[12] 黄松,黄继业. EDA技术实用教程[M]. 北京:科学出版社,2010:259-262.
