传感器网络分布式鲁棒自适应估计算法*
2018-05-03康凯凯刘兆霆
康凯凯,刘兆霆
(杭州电子科技大学通信工程学院,杭州 310000)
传感器网络[1-3]是由大量传感器节点构成的分布式网络系统,具有体积小、低功耗、低成本、分布式和自组织的特点。它能够协同地实时监测、感知和采集网络覆盖区域中各种环境或监测对象的物理信息,并对其进行处理和传输,在军事国防、工农业控制、环境检测、危险区域远程控制等领域都具有重要的科学意义和广阔的应用前景。
参数估计是传感器网络的一个重要应用,它通过建立一定的统计模型,并采用各种算法从被噪声污染的信号测量值中获得对某一参数的估计,从而确定不同物理量间的相互依赖关系。在最小均方误差 LMS(Least Mean Square)算法和递归最小二乘RLS(Recursive Least Square)算法[4]基础上提出的基于网络节点相互协作的分布式估计是近年来研究的热点,它摒弃了传统集中式估计方法要求具备强大计算和数据存储能力的中央节点,能够有效克服可靠性差、计算和通信资源要求高等缺点。目前,已知的节点协作方式包括增量式(Incremental)[5]和扩散式(Diffusion)[6-8],而基于扩散式节点协作方式的分布式估计算法,如扩散式LMS[6]、扩散式RLS[7-8]是非常有效的一类算法。在此算法的基础上,人们进一步提出了分布式稀疏估计算法[9-11]、权重自适应的分布式估计算法[12]、基于删失回归模型的分布式算法[13]等等,这其中也包含我们研究团队的一些研究成果[9,13]。
值得注意的是,在传感器网络中,大量传感器节点可能处于不同且复杂的测量环境中。例如,某些节点可能存在冲击噪声或脉冲干扰[14-15],也可能被人为恶意攻击,导致它们的测量值中包含大大偏离实际范围的离群值。在自适应参数估计算法中,基于残差平方作为代价函数的算法(如传统的最小二乘的算法或其衍生算法)对数据中的离群值非常敏感,造成估计结果非常不稳定,并存在较大的偏差和不准确性。相比之下,采用残差绝对值作为代价函数的算法,对这样的离群值的敏感性较弱,估计结果的稳定性较好,然而该类算法获得估计精度也不高,与此同时,当一个节点受到干扰或攻击时,该节点将会产生不准确的参数估计,并且这种局部的不利影响会通过一系列的邻居节点扩散到整个网络,使整个网络的分布式处理机制瘫痪。事实上,基于传感器网络的自适应鲁棒估计[16-17]的分布式算法很少报道。
解决节点存在冲击噪声或脉冲干扰情况下的分布式估计问题,我们可以试图通过某种方法检测到被干扰的节点,然后排除这些节点,但是这种方法需要提出较可靠的检测算法,同时排除被干扰的节点会带来网络拓扑的变化,需要重新分配节点融合的权重。本论文研究将克服这个问题,通过考虑在一个测量时间窗内,节点受到干扰或攻击具有偶然性(稀疏性)的特点,建立具有稀疏约束的代价函数,并通过相关的优化算法来识别可能被干扰或攻击的节点,对该节点的离群值进行在线校正,从而可以获得较好的分布式参数估计结果。通过一系列的仿真实验,我们验证了该算法的有效性。

图1 传感器网络
1 传感器网络信号模型
假设一个由N个传感器节点构成的网络,每个节点k对应一个线性系统测量模型:
(1)

(2)
上述分布式估计算法融合了每个节点及其邻居节点的状态信息,能够产生较好的估计结果。然而,当某些节点存在冲击噪声、脉冲干扰,或被人为恶意攻击时,导致它们的测量值dk,i中可能包含大大偏离实际范围的离群值时,上述分布式算法的估计性能急剧下降。在这种情况下,网络节点的测量模型可以表示为:
(3)

2 分布式LMS鲁棒性估计算法
通常,我们可以假设每个传感器遇到的冲击噪声或脉冲干扰是偶发的,这等价于,在一段时间窗T内的数据{ok,i,ok,i-1,…,ok,i-T+1}中,只有少数个ok,j(i-T+1≤j≤i)是非零的。也就是说,矢量:
ok,i=[ok,i,ok,i-1,…,ok,i-T+1]T
(4)
是一个稀疏的。在这种情况下,为了获得参数w0的估计,我们可以先考虑矢量的ok,i估计,然后利用ok,i的估计值对输出测量dk,i进行偏差补偿,最终获得参数w0的估计。根据这个思路,我们可以考虑下面的优化问题:
(5)
式中:dk,i=[dk,i,dk,i-1,…,dk,i-T+1]T是T×1矢量,Gk,i=[uk,i,…,uk,i-1,uk,i-T+1]是M×T矩阵。在式(5)中,我们考虑了矢量ok,i的稀疏性,在代价函数中增加了1-范数作为稀疏约束并通过参数γ来控制估计结果的稀疏程度。
式(3)的优化问题,可以分解为下列两个子问题:
(6)
式中:第1个最小化问题有闭合解:

(7)
式中:

(8)
由于在参数估计过程中,网络中的每个节点可以与自己的邻居节点相互通信,因此各个节点在每个时刻的参数估计值可以在其邻居节点内融合和扩散,从而提高参数估计值的准确性。将这一思想与式(8)结合,得到我们分布式LMS鲁棒性估计(Robust d-LMS)算法:
(9)
3 性能仿真分析

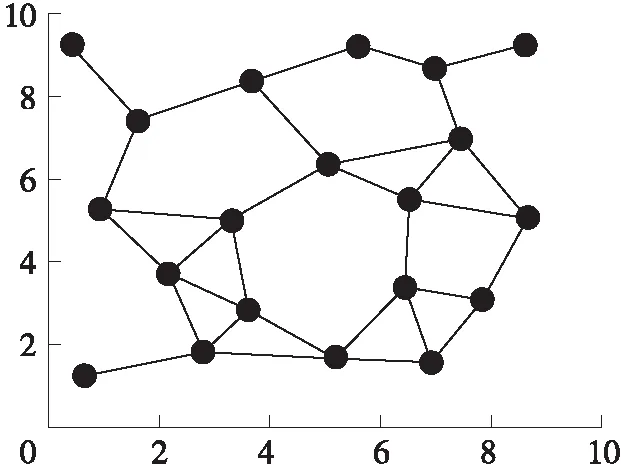
图2 网络拓扑结构

图3 各个节点的输入噪声方差
图4中给出了网络的瞬态平均MSD,图5进一步给出了两种算法在稳定状态情况下各个节点对应的MSD。我们考虑了不同的步长,并且假设每个节点的观测值中包含P=10%的离群值。Robust d-LMS算法时间窗T的值设置为30。可以看到,在观测值中存在离群值时,不同的d-LMS算法无法实现有效的参数估计;而相比之下,提出的Robust d-LMS算法具有明显的鲁棒性,仍然能够获得较好的参数估计。

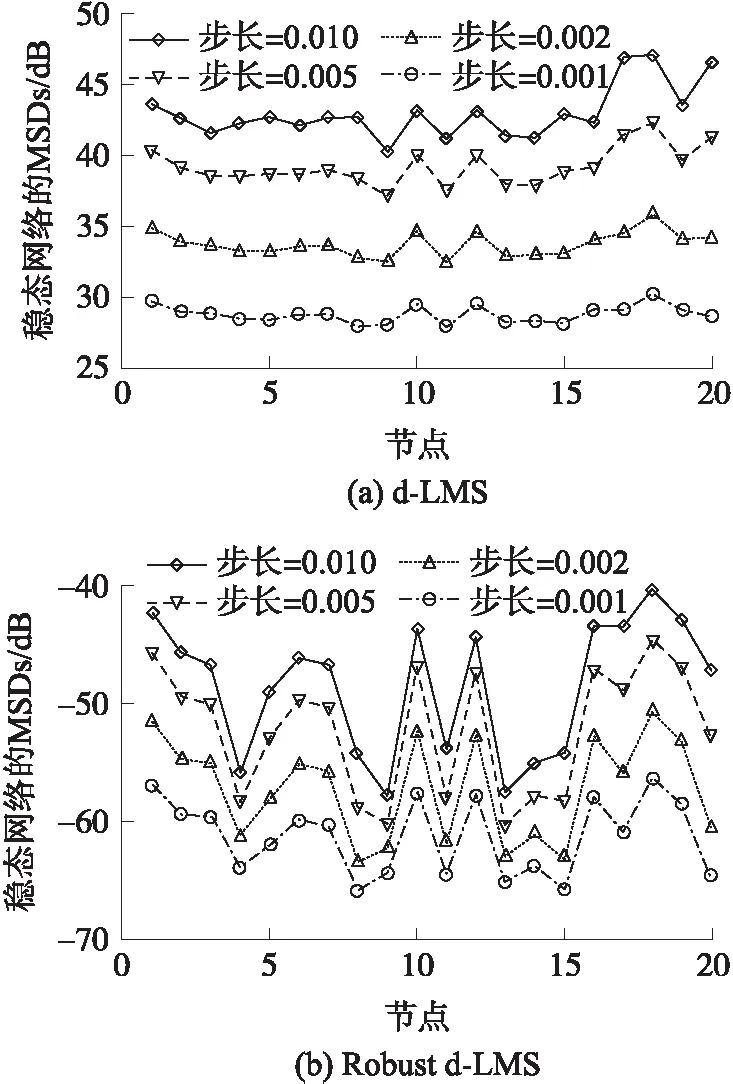
图5 T=30,P=10%,稳定状态时各个节点的MSD比较

图4 T=30,P=10%,平均瞬态MSD与循环时间i的比较

图6 节点的稳态MSD平均
4 总结
本文研究了基于传感器网络分布式估计问题,提出了一种在网络受到冲击噪声或脉冲干扰等情况下的分布式鲁棒自适应估计(Robust d-LMS),该算法有效解决了网络节点采样数据中可能存在的离群值而导致估计性能严重下降的问题。提出的Robust d-LMS 主要基于离群值在网络采样数据中具有稀疏性的思想,在代价函数中引入稀疏约束项,通过优化算法剔除采样数据可能的离群值,并获得有效的参数估计。在仿真实验中,我们比较了提出的Robust d-LMS 和传统的d-LMS算法,结果验证了Robust d-LMS 算法具有明显的鲁棒性。
参考文献:
[1] 孙利民,李建中,陈渝,等. 无线传感器网络[M]. 北京:清华大学出版社,2005.
[2] 余修武,范飞生,周利兴,等. 无线传感器网络自适应预测加权数据融合算法[J]. 传感技术学报,2017,30(5):772-776.
[3] Ma L,Wang Z,Lam H,et al. Distributed Event-Based Set-Membership Filtering for a Class of Nonlinear Systems with Sensor Saturations Over Sensor Networks[J]. IEEE Transactions on Signal Processing,2017,47(11):3892-3905.
[4] Sayed A H. Adaptive Filters[M]. New York,USA,Wiley-IEEE Press,2008.
[5] Lopes C G,Sayed A H. Incremental Adaptive Strategies over Distributed Networks[J]. IEEE Transactions on Signal Processing. 2007,55(8):4064-4077.
[6] Cattivelli F S,Sayed A H. Diffusion LMS Strategies for Distributed Estimation[J]. IEEE Transactions on Signal Processing,2010,58(3):1035-1048.
[7] Cattivelli F S,Lopes C G,Sayed A H. Diffusion Recursive Least-Squares for Distributed Estimation over Adaptive Networks[J]. IEEE Transactions on Signal Processing,2008,56(5):1865-1877.
[8] Mateos G,Giannakis G B. Distributed Recursive Least-Squares:Stability and Performance Analysis[J]. IEEE Transactions on Signal Processing,2012,60(7):3740-3754.
[9] Liu Zhaoting,LiuYing,Li Chunguang. Distributed Sparse Recursive Least-Squares Over Networks[J]. IEEE Transactions on Signal Processing,2014,62(6):1386-1395.
[10] Liu Y,Li C,Zhang Z. Diffusion Sparse Least-Mean Squares over Networks[J]. IEEE Transactions on Signal Processing,2012,60(8):4480-4485.
[11] Di Lorenzo P,Sayed A H. Sparse Distributed Learning Based on Diffusion Adaptation[J]. IEEE Transactions on Signal Processing,2013,61(6):1419-1433.
[12] Noriyuki Takahashi,Isao Yamada,Ali H Sayed. Diffusion Least-Mean Squares with Adaptive Combiners-Formulation and Performance Analysis[J]. IEEE Transactions on Signal Processing,2010,58(9):4795-4810.
[13] Liu Zhaoting,Li Chunguang,Liu Yiguang. Distributed Censored Regression Over Networks[J]. IEEE Transactions on Signal Processing,2015,63(20):5437-5449.
[14] Zayyani H,Korki M,Marvasti F. A Distributed 1-bit Compressed Sensing Algorithm Robust to Impulsive Noise[J]. IEEE Communications Letters,2016,20(6):1132-1135.
[15] Chen P,Rong Y,Nordholm S,et al. Joint Channel Estimation and Impulsive Noise Mitigation in Underwater Acoustic OFDM Communication Systems[J]. IEEE Transactions on Wireless Communications,2017,16(9):6165-6178.
[16] Zoubir A M,Koivunen V,Chakhchoukh Y,et al. Robust Estimation in Signal Processing:A Tutorial-Style Treatment of Fundamental Concepts[J]. IEEE Signal Processing Magazine,2012,29(4):61-80.
[17] Eldar Y C,Merhav N. A Competitive Minimax Approach to Robust Estimation of Random Parameters[J]. IEEE Transactions on Signal Processing,2004,52(7):1931-1946.
[18] Babadi B,Kalouptsidis N,Tarokh V. SPARLS:The sparse RLS algorithm[J]. IEEE Transactions on Signal Processing,2010,58(8):4013-4025.