农业轮式移动机器人自适应滑模路径跟踪控制
2018-05-03李逃昌
李逃昌
辽宁工程技术大学电气与控制工程学院,葫芦岛,125105
0 引言
农业轮式移动机器人自动导航技术是实现现代农业生产的关键技术,而路径跟踪控制是其中的一个主要研究内容[1-2]。有学者基于预瞄思想进行了纯追踪模型方法的研究,文献[3]针对农业轮式移动机器人的地头转向问题,提出了一种改进的纯追踪模型并实现了地头路径的跟踪;文献[4]提出了一种基于逆向模型的农业机器人纯追踪控制方法,提高了纯追踪路径跟踪控制方法的适应性和动态性能。为了使农业机器人路径跟踪过程满足某一性能指标,文献[5]研究了双参数最优控制方法,实现了农业轮式移动机器人的直线路径跟踪与地头转弯路径跟踪控制;文献[6]将非线性模型预测控制应用到农业机器人的路径跟踪控制中,解决了系统状态和控制量受限时的优化控制问题。鉴于农业机器人在作业时重复性较强的特点,有学者进行了学习控制方法的研究,文献[7]提出一种基于迭代学习的路径跟踪控制方法,有效地利用了农业机器人作业运行时的重复信息;文献[8]提出一种滑模反馈误差学习路径跟踪控制方法,采用滑模控制理论实现Type-2型模糊神经网络参数的自动调节。由于滑模变结构控制具有对干扰不敏感的特性,近年来被广泛应用到机器人控制领域,文献[9]针对机械臂的高精度轨迹跟踪问题,提出了一种鲁棒滑模控制方法,并证明了闭环系统的稳定性;文献[10]提出一种带有积分器的自适应滑模动力学路径跟踪控制方法,其控制性能优于传统的滑模控制方法和运动学反演控制方法。上述路径跟踪控制方法都是基于时间参考量进行设计的,求解的路径跟踪控制律依赖于时间与速度信息,而与农业机器人的运行状态(例如避障或者临时进行其他作业)不相关,从而导致系统的路径规划与跟踪控制不协调[11-12]。
综上,本文首先基于非时间参考量建立农业轮式移动机器人的相对运动学模型,该模型不但可以将跟踪控制问题转化为镇定问题还可以摆脱时间和速度因素的影响;然后对传统的滑模控制方法进行改进,提出一种基于新型趋近律和RBF(radial basis function)神经网络的自适应滑模路径跟踪控制方法,提高了农业轮式移动机器人受到不确定扰动时的路径跟踪性能。
1 非时间参考的轮式移动机器人相对运动学模型
本文以面向旱田喷药应用的后轮驱动前轮转向的农业轮式移动机器人为例,建立数学模型。由于本文最终推导的系统模型是通过非时间参考量s驱动的,所以本文中除了式(1)和式(6)的求导是针对时间变量t外,其他求导运算都是针对s而言的。相应地,在讨论系统响应快慢时都是通过路径上的参考点距离路径起始点的弧长来表达,而不再是时间t。定义一个导航坐标系和一个路径上的弗雷内(Frenet)坐标系,如图1所示。通过图中的几何关系可以推导出移动机器人与路径之间的相对运动关系,即相对运动学模型:
(1)
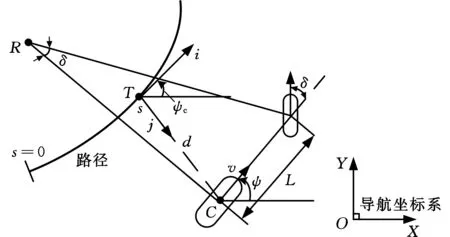
图1 移动机器人与路径相对运动关系Fig.1 Relative motion relationship between a mobilerobot and a path
式中,s为路径弧长;v为机器人的速度;d为位置误差,即机器人与路径之间的距离误差;θe为方向误差,即机器人的行进方向与路径方向之间的角度误差;c(s)为路径曲率;ρ为机器人的转向曲率;δ为机器人转向轮的转角;L为移动机器人的轴长。
令x=[x1x2]T=[dθe]T,则式(1)可以变换成如下形式:

(2)

根据动态反馈线性化理论,对式(2)分别采用如下的状态变换和输入变换:
(3)
u=φ(x,ρ)=sec3x2(1-x1c(s))2ρ+
(x1c(s)-1)c(s)(tan2x2+sec2x2)
(4)
则可以得到可控标准型:
(5)
农业轮式移动机器人本身的复杂性、土壤等农田环境以及大型负载的不确定性,会给移动机器人的横摆角速度动力学带来很大的扰动。根据文献[13]可知,上述不确定性扰动主要对横摆角速度的稳态特性产生较大影响,所以本文引入干扰项|Δτ|≤Γ(其中Γ为干扰上界)来表示该影响,进而得到模型
(6)
同理可以将上述模型(式(6))等效变换为
(7)
推导的移动机器人与路径之间的相对运动学模型(式(5)和式(7))中,不显含时间t和速度v,摆脱了时间和速度对系统的影响,提高了不确定状况下机器人的路径跟踪能力。

2 非时间参考自适应滑模控制器设计与分析
式(7)中的不确定项Δφ随着路径跟踪误差状态的改变,幅值变化很大。若在进行鲁棒控制器设计时假设一个较大的干扰界,则势必会增大抖振量并导致控制结果过于保守。为此,本文在滑模变结构鲁棒控制框架内,采用RBF神经网络自适应估计Δφ,同时设计一种新型快速趋近律,进而基于新型趋近律和RBF神经网络进行自适应滑模路径跟踪控制器设计。
2.1 新型滑模趋近律设计与分析
在滑模控制设计中采用趋近律方法可以保证趋近运动的动态品质,为此本文将指数趋近律中的等速趋近项用幂次项来代替得到如下的新型快速趋近律:
(8)
0
在趋近运动过程中幂次项的变速趋近作用可以有效地减弱控制量的抖振现象。
证明:
由趋近律(式(8))可得
所以,根据连续系统滑模趋近律存在且可达性条件可知:所设计的滑模趋近律为存在且可达的。
当σ≥0时,将式(8)改写成如下形式:
(9)
求解上述由s驱动的微分方程(式(9)),可得到如下关系:
(10)
通过式(10)可以求得系统从σ=σ0到σ=0所需的跟踪路程为
(11)
证毕。
2.2 自适应滑模控制器设计与分析
在滑模控制器的设计过程中,本文采用线性滑模面
σ=αe1+e2
(12)
其中,α>0,以保证滑模面稳定。
对式(12)两边关于s进行微分并结合式(7)和式(8)可得

(13)
令Δφ=0,由式(13)便可得到滑模控制律为
(14)
(15)
Φ≥|Δφ|
进而由式(15)可得
(16)
为了消除该干扰稳定界,本文运用RBF神经网络的在线学习能力来估计Δφ,神经网络的输入为e1和e2。若RBF神经网路的理想输出Δφ*=Δφ,即
(17)

若Δφ通过RBF网络进行估计的值为
(18)

则由式(17)和式(18)可得
(19)
(20)
式中,λ为自适应律的调节参数。

(21)
定理2 若RBF神经网路的理想输出Δφ*=Δφ,则采用网络权值自适应律(式(20))和滑模控制律(式(21))可以使路径跟踪系统全局渐近稳定。
证明:
(22)
证毕。
3 仿真验证与分析
为了验证本文提出方法的有效性,以农业轮式移动机器人路径跟踪控制系统为例进行仿真验证。仿真过程中选择的参数情况如下:L=3 m,ε=1.2,k=0.8,p=0.5,α=10,λ=2000,b=2,cj=(-0.4,-0.2,0,0.2,0.4)。因为农业轮式移动机器人作业过程中主要跟踪的作业路径为圆弧路径和直线路径或者为其组合路径,所以本文在仿真验证中主要针对这两种路径进行验证。

(a)位置误差
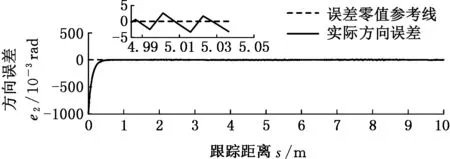
(b)方向误差图2 基于传统滑模控制方法的路径跟踪误差Fig.2 Path tracking error based on traditional sliding mode control method
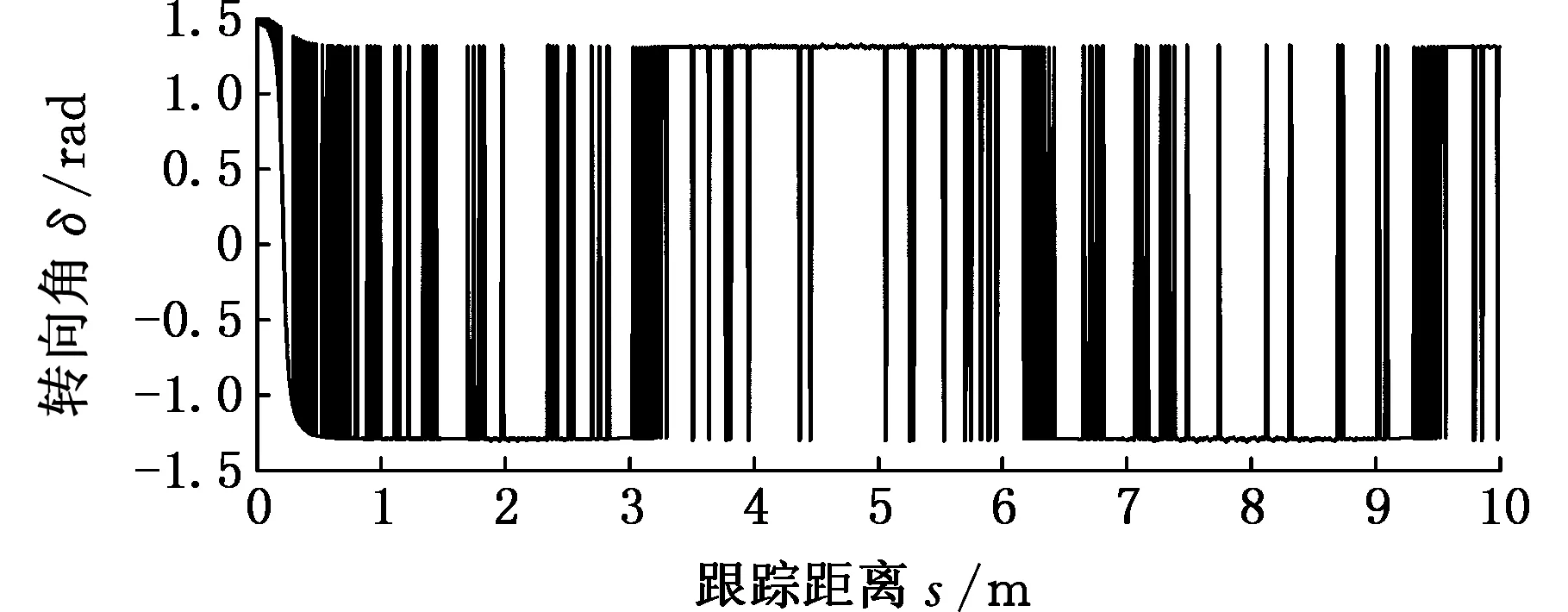
图3 基于传统滑模控制方法的转向角控制量Fig.3 Steering angle based on traditional sliding mode control method
通过图2可以看出,采用传统滑模控制方法可以使路径跟踪的位置误差和方向误差收敛到零点附近,但是从图2中的局部放大图来看,系统的稳态过程存在稳态误差和振荡现象。从图3中可以看出,传统滑模控制方法的控制量出现严重的抖振现象,也正是控制量的抖振导致了图2中输出量的振荡。为了抑制不确定性干扰,传统滑模控制方法必然会产生抖振现象。
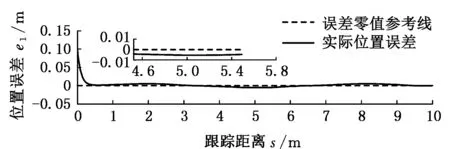
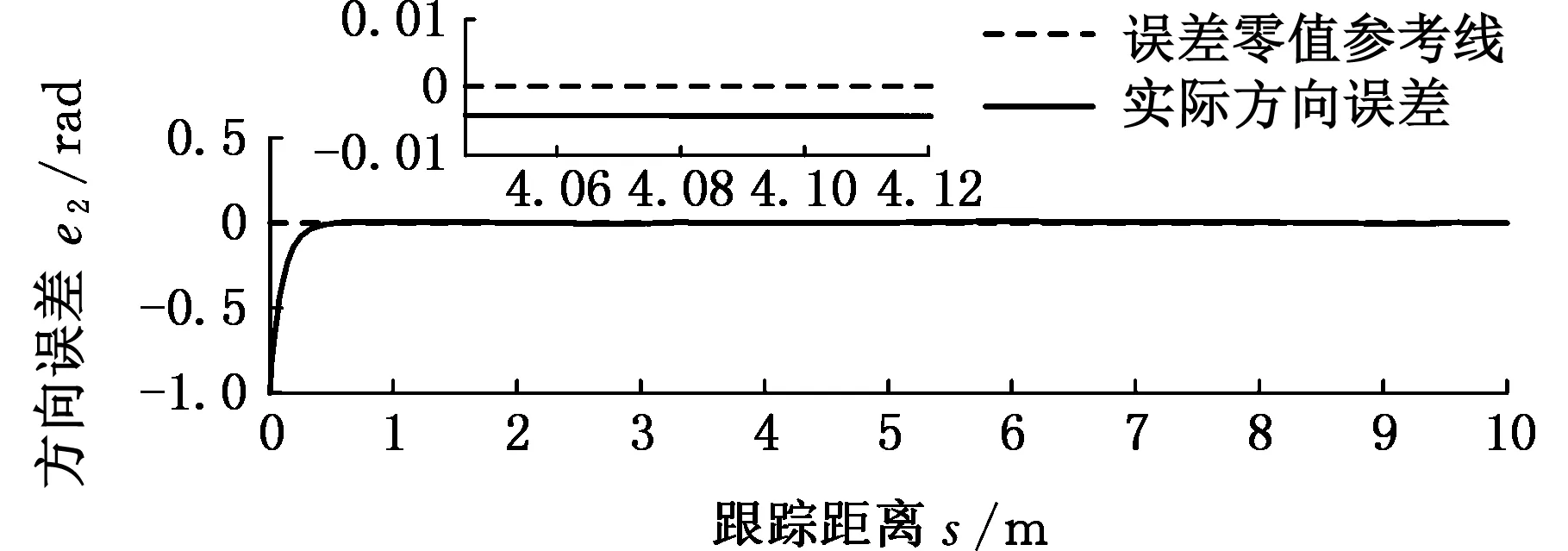
采用本文方法进行仿真,结果如图4~图6所示。由图4可以看出,本文提出的方法可以使路径跟踪的位置误差和方向误差在有限跟踪距离内收敛到零点,具有较好的路径跟踪性能;从图5中可以看出,本文方法控制量基本上不存在抖振现象。这是因为本文方法将传统的指数趋近律中的等速趋近项进行了改造,用变速趋近项代替等速趋近项;此外,本文采用RBF神经网络在线自适应地估计系统的干扰项,使控制系统在具有自适应性能的同时也减弱了系统的抖振现象。由图6可以看出,本文采用的RBF神经网络可以很好地估计系统的不确定干扰。
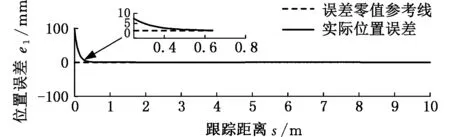
(a)位置误差
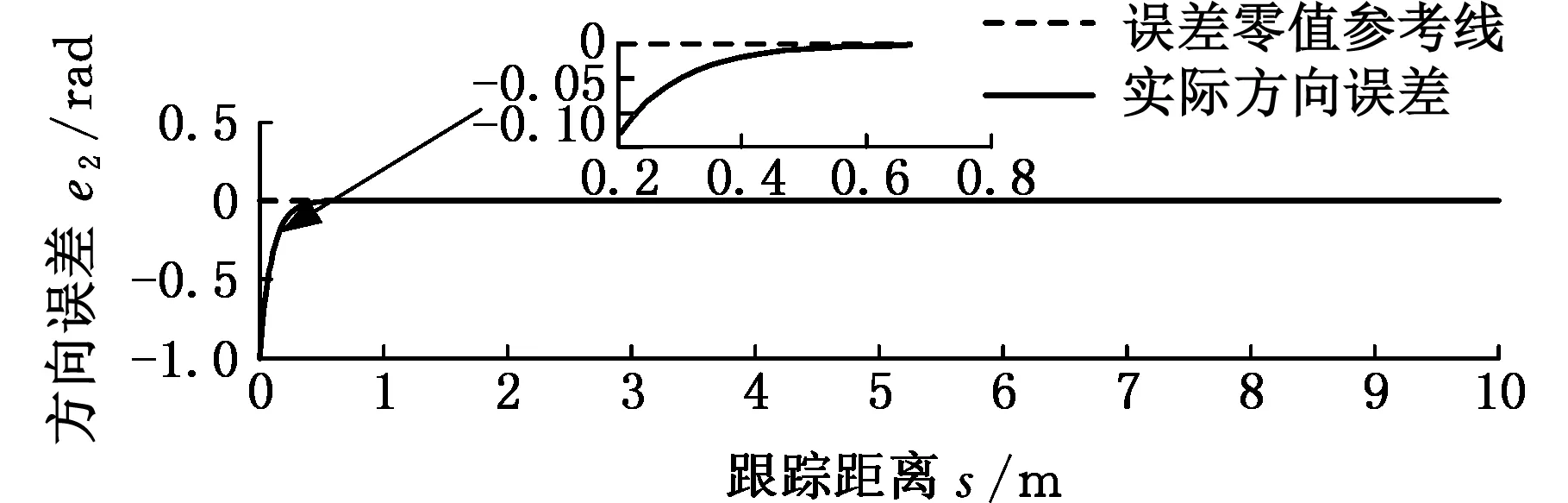
(b)方向误差图4 基于本文方法的路径跟踪误差Fig.4 Path tracking error based on the proposed method
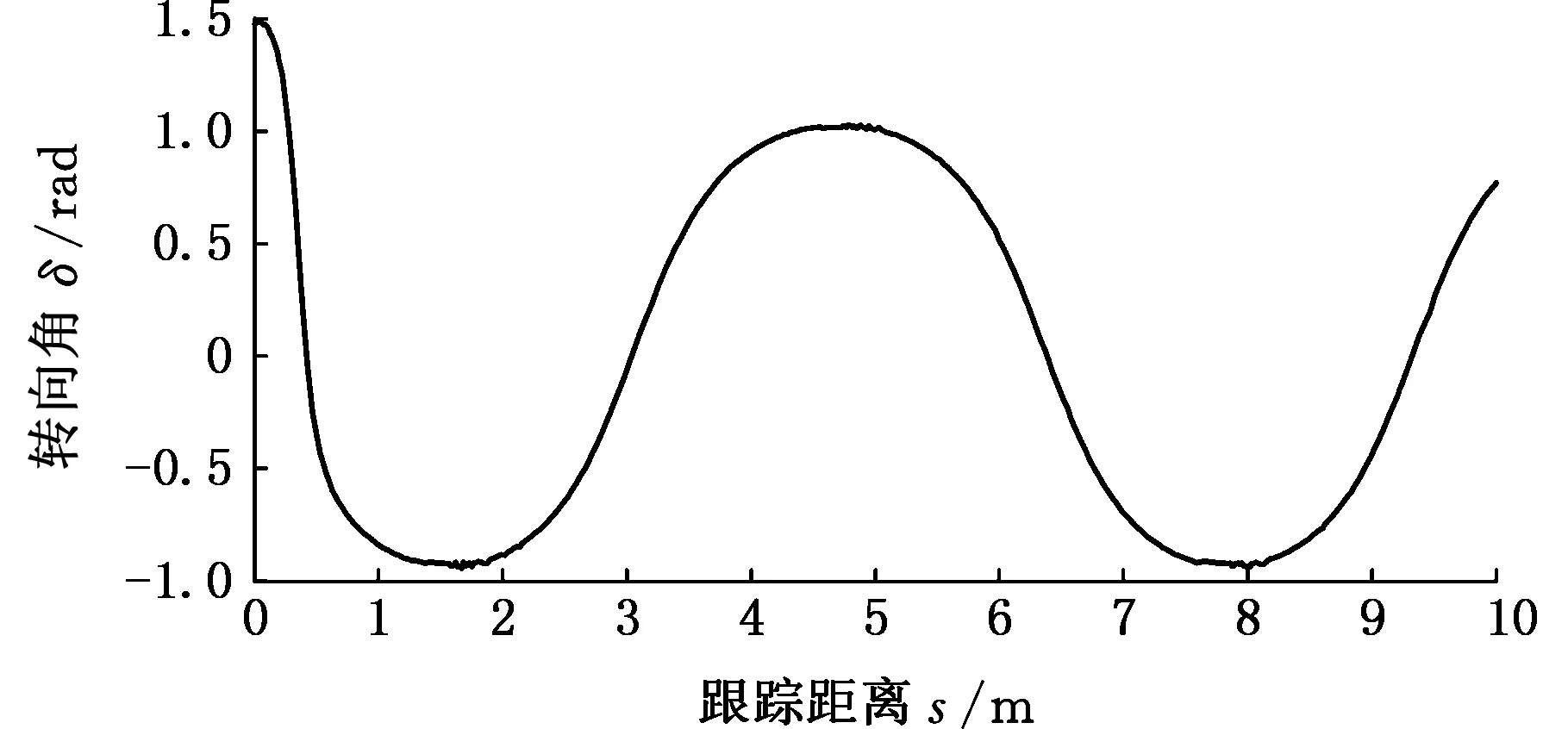
图5 基于本文方法的转向角控制量Fig.5 Steering angle based on the proposed method
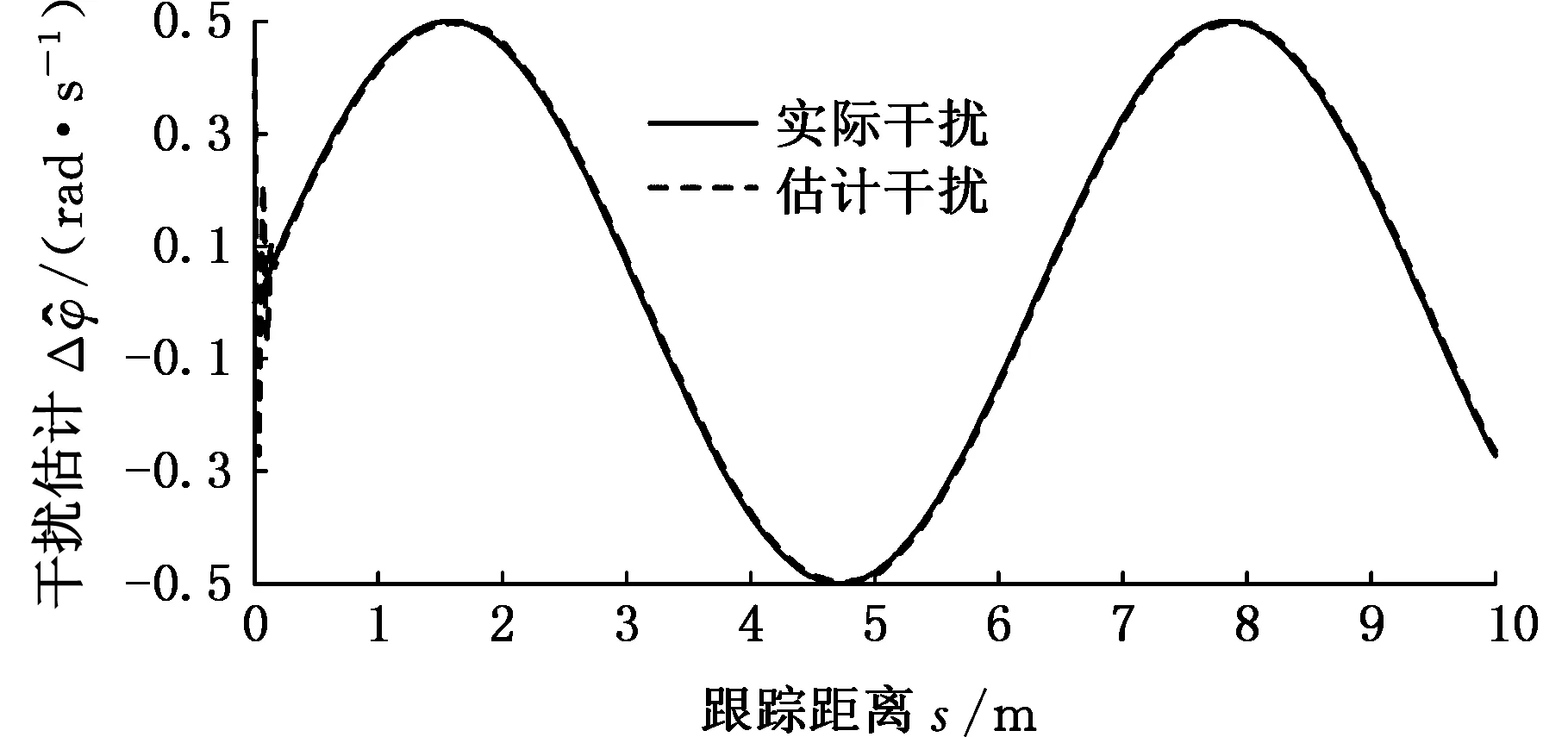
图6 基于RBF神经网络的干扰估计Fig.6 Disturbance estimation based on RBF neural network
如果不采用RBF神经网络在线估计系统的不确定干扰,则仿真结果如图7、图8所示。通过仿真结果可以看出,虽然控制量不产生抖振,但是跟踪误差不能收敛到零点,而是收敛到零点的一个邻域内(这与2.2节理论分析的结论一致),使系统的稳态性能变差。由此可见本文引入RBF神经网络估计不确定干扰的必要性。
(a)位置误差
(b)方向误差图7 不采用RBF神经网络时的路径跟踪误差Fig.7 Path tracking error without using RBF neural network
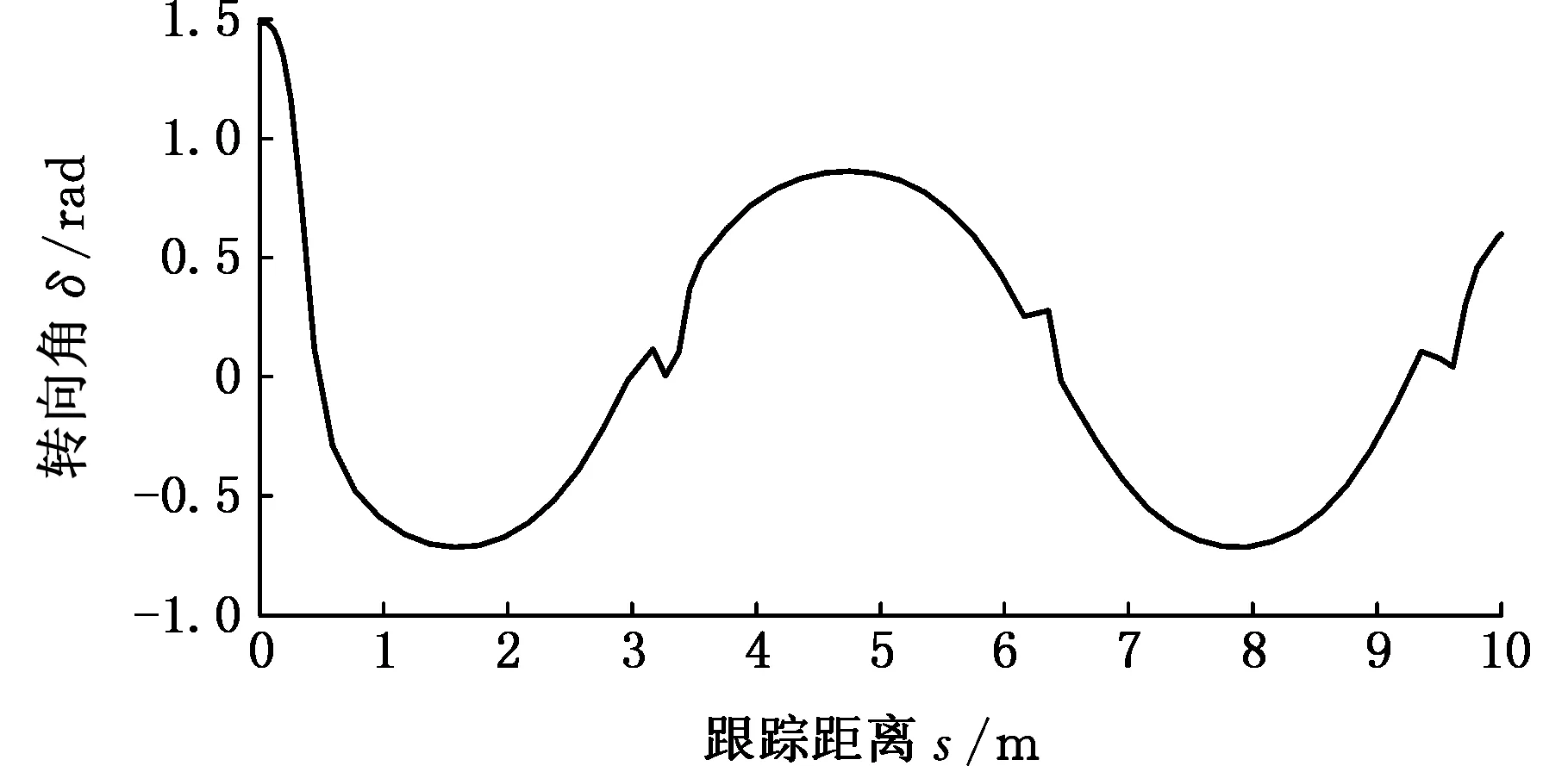
图8 不采用RBF神经网络时的转向角控制量Fig.8 Steering angle without using RBF neural network
为了验证本文方法对不同速度的适应能力(即速度无关特性),使移动机器人在不同速度下跟踪直线路径(路径曲率c(s)=0),仿真结果如图9所示。
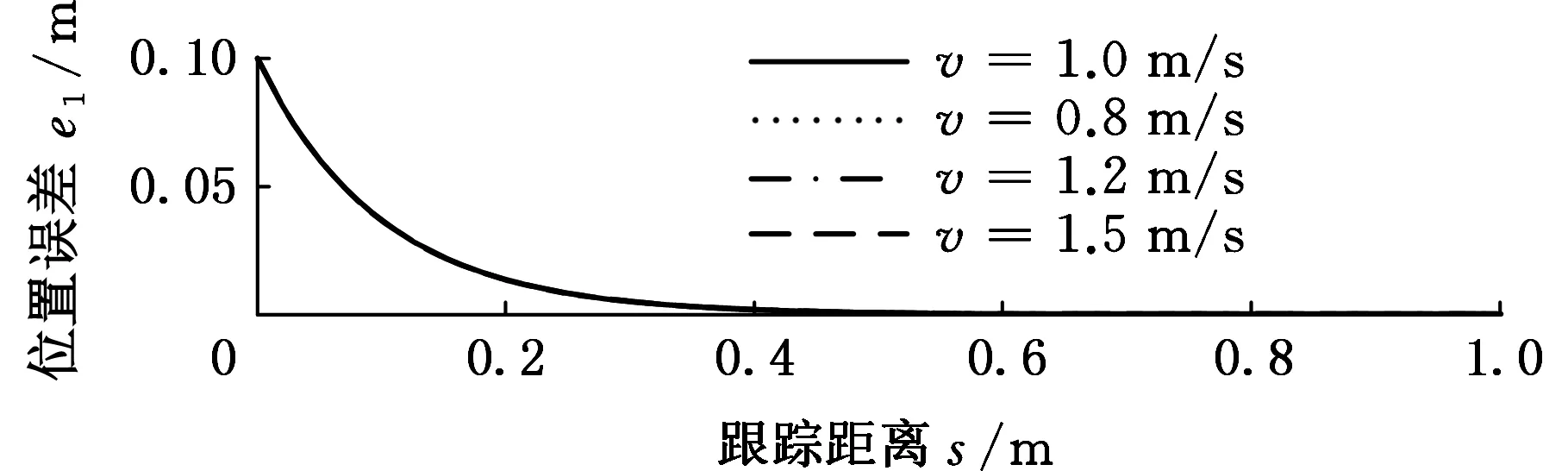
(a)位置误差
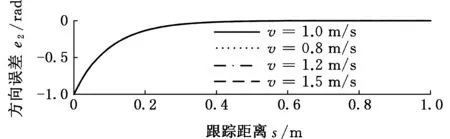
(b)方向误差图9 不同速度时的路径跟踪误差Fig.9 Path tracking error at different speeds
从图9中可以看出,在不同的速度下,移动机器人路径跟踪的位置误差和方向误差曲线基本上一致,从而验证了本文方法针对不同速度的适应能力。这是具有自动路径跟踪能力的农业移动机器人所应具备的能力。因为在农业机器人作业过程中,机器人的行驶速度是根据作业的情况由作业控制系统来实时设定的,因此农业机器人的路径跟踪系统对速度的变化应具有适应性和一致性。
4 结论
本文提出一种非时间参考的自适应滑模路径跟踪控制方法。首先基于非时间参考量s推导了轮式移动机器人在受到扰动时的相对运动学模型,该模型不但将机器人的路径跟踪问题转化为一个镇定问题,而且还摆脱了时间和速度对系统的影响。然后对传统的指数趋近律进行改造,提出一种新型快速趋近律并对其收敛性进行了理论证明;此外本文采用RBF神经网络在线估计系统的不确定性干扰,进而提出一种基于新型趋近律和RBF神经网络的自适应滑模控制方法,在提高路径跟踪控制系统鲁棒自适应性的同时减弱了抖振现象。仿真结果验证了本文方法的有效性及较传统滑模控制方法的优越性。
参考文献:
[1] 胡静涛, 高雷, 白晓平,等. 农业机械自动导航技术研究进展[J]. 农业工程学报, 2015, 31(10):1-10.
HU Jingtao, GAO Lei, BAI Xiaoping, et al. Review of Research on Automatic Guidance of Agricultural Vehicles[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(10): 1-10.
[2] 姬长英, 周俊. 农业机械导航技术发展分析[J]. 农业机械学报, 2014, 45(9):102-103.
JI Changying, ZHOU Jun. Current Situation of Navigation Technologies for Agricultural Machinery[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(9):44-54.
[3] 黄沛琛, 罗锡文, 张智刚. 改进纯追踪模型的农业机械地头转向控制方法[J]. 计算机工程与应用, 2010, 46(21):216-219.
HUANG Peichen,LUO Xiwen,ZHANG Zhigang. Control Method of Headland Turning Based on Improved Pure Pursuit Mode for Agricultural Machine[J].Computer Engineering and Applications, 2010, 46( 21):216-219.
[4] 张闻宇, 丁幼春, 王雪玲,等. 基于SVR逆向模型的拖拉机导航纯追踪控制方法[J]. 农业机械学报, 2016, 47(1):29-36.
ZHANG Wenyu, DING Youchun, WANG Xueling, et al. Pure Pursuit Control Method Based on SVR Inverse-model for Tractor Navigation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1):29-36.
[5] 韩科立, 朱忠祥, 毛恩荣,等. 基于最优控制的导航拖拉机速度与航向联合控制方法[J]. 农业机械学报, 2013, 44(2):165-170.
HAN Keli,ZHU Zhongxiang,MAO Enrong,et al. Joint Control Method of Speed and Heading of Navigation Tractor Based Optimal Control [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2):165-170.
[6] BACKMAN J, OKSANEN T, VISALA A. Navigation System for Agricultural Machines: Nonlinear Model Predictive Path Tracking[J]. Computers & Electronics in Agriculture, 2012, 82(1):32-43.
[7] 卜旭辉, 侯忠生, 余发山,等. 基于迭代学习的农业车辆路径跟踪控制[J]. 自动化学报, 2014, 40(2):368-372.
BU Xuhui, HOU Zhongsheng, YU Fashan, et al. Iterative Learning Control for Trajectory Tracking of Farm Vehicles[J]. Acta Automatica Sinica, 2014, 40(2): 368-372.
[8] KAYACAN E, KAYACAN E, RAMON H, et al. Towards Agrobots: Trajectory Control of an Autonomous Tractor Using Type-2 Fuzzy Logic Controllers[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(1):287-298.
[9] 姚来鹏, 侯保林. 随机振动机械臂的自适应鲁棒滑模控制[J]. 中国机械工程, 2016, 27(5): 694-697.
YAO Laipeng, HOU Baolin. Adaptive Sliding Mode Control of Robotic Manipulators with External Uncertain Stochastic Vibration[J]. China Mechanical Engineering, 2016, 27(5): 694-697.
[10] ASIF M, KHAN M, CAI N. Adaptive Sliding Mode Dynamic Controller with Integrator in the Loop for Nonholonomic Wheeled Mobile Robot Trajectory Tracking[J]. International Journal of Control, 2014, 87(5):964-975.
[11] 王栋耀, 马旭东, 戴先中. 非时间参考的移动机器人路径跟踪控制[J]. 机器人, 2004, 26(3):198-203.
WANG Dongyao, MA Xudong, DAI Xianzhong. Non-time Based Path Tracking Control for Mobile Robots[J]. Robot, 2004, 26(3):198-203.
[12] 陈宜滨, 席宁, 李洪谊. 基于事件的控制理论研究及其应用[J]. 机械工程学报, 2012, 48(17):152-158.
CHEN Yibin, XI Ning, LI Hongyi. Event-based Control Theories and Applications[J]. Journal of Mechanical Engineering, 2012, 48(17):152-158.
[13] DERRICK J B, BEVLY D M. Adaptive Steering Control of a Farm Tractor with Varying Yaw Rate Properties[J]. Journal of Field Robotics, 2009, 26(6/7):519-536.
[14] 张合新, 范金锁, 孟飞, 等. 一种新型滑模控制双幂次趋近律[J]. 控制与决策, 2013, 28(2):289-293.
ZHANG Hexin, FAN Jinsuo, MENG Fei, et al. A New Double Power Reaching Law for Sliding Mode Control[J]. Control & Decision, 2013, 28(2):289-293.
