基于非圆齿轮的卡登圆行星机构运动学分析与仿真
2018-05-02罗竞波李美求冯小刚
罗竞波 - 李美求 - 冯小刚 - 华 剑
(1. 长江大学机械结构强度与振动研究所,湖北 荆州 434023;2. 大庆油田井下作业分公司修井一大队,黑龙江 大庆 163000)
非圆齿轮机构可以实现特殊的运动和函数运算,在某些情况下,采用非圆齿轮对机构的运动特性极为有利,有效地提高了机构的性能,改善了机构的运动条件,目前理论研究趋于成熟,已得到广泛的应用[1]。卡登圆行星机构是一种将行星架的旋转运动转化为导杆往复直线运动的装置。其具有结构简单,可靠性高,输出端始终做往复直线运动的特点[2]。与传统的曲柄滑块机构相比,由于滑动副中不存在周期性变化的接触力,因此运动精度高,能耗低,使用时间长,在往复运动机构中具有广阔的应用价值。可用在诸如配料机、活塞式制冷压缩机等食品加工机械中[3]。卡登圆行星机构目前的研究集中在结构创新上[4],本试验通过建立卡登圆行星机构的数学模型,利用几何分析的方法得到机构的参数约束条件,通过复数矢量法来进行运动分析,结合仿真的手段验证分析结果,为设计提供理论基础。同时通过将卡登圆行星机构与非圆齿轮机构相结合,分析非圆齿轮机构中不同参数对卡登圆行星机构输出结果的影响。
1 卡登圆行星机构的数学模型
1.1 卡登圆行星机构的组成
卡登圆行星机构的零部件有行星架、行星轮、中心轮、导杆、壳体等[4]。其中导杆2与行星轮1分度圆上的任意一点O采用旋转副连接。图1是卡登圆行星机构的运动简图,将该装置置于平面直角坐标系OHxy中。行星架H为动力输入件,其长度为lH,绕OH点以角速度ωH逆时针方向旋转,H与X轴所夹锐角为θH。行星轮1与中心轮3内啮合,其中心为O1,以角速度ω1顺时针方向自转,同时环绕OH以角速度ωH逆时针方向公转。导杆2与行星轮1分度圆上的点O通过旋转副连接,与X轴所夹锐角为θ2。OO1的长度为l1,与H所夹锐角为θ1。
工作时,以行星架H为原动件,带动行星轮1做行星运动,中心轮3固定,从而使行星轮1的分度圆上的点O带动导杆2做往复直线运动。

图1 卡登圆行星机构的运动简图Figure 1 Kinematic diagram of the Carden circle planetary mechanism
1.2 卡登圆行星机构的结构分析
设某一初始时刻,其连接点O的坐标为:
(1)
设行星轮1的齿数为Z1,中心轮3的齿数为Z3,由齿轮啮合规律,行星轮1相对于行星架H的自转角速度:
(2)
取逆时针方向为正,经过时间t后,角度变化规律:
θH→θH+ωHt,
(3)
(4)
此时连接点O′的坐标为:
(5)

(6)
连接点O始终要做经过坐标原点OH的往复直线运动,由几何关系:
(7)
将式(5)、(6)带入式(7)得:
(8)
即:
(9)
式中:
x=θH;
y=θ1+θH;
α=ωHt≠0;
令z=x-y=-θ1,则式(9)可表示为:
(10)
即:
(11)
等式两边展开:
(12)
式中:
z,lH,l1——常量;
α,β——变量。
分析左右两边,若要保证该机构的运动连续性,则式(12) 应满足以下条件:
分析上述条件得:
z=π+kπ,k∈Z;
(13)
l1=lH。
(14)
即初始安装角度θ1=-(k+1)π。θH,θ2可根据安装需要进行取值。行星架H的中心距离长度lH与行星轮1的分度圆半径l1等长,因此行星轮1的分度圆直径是中心轮3的分度圆直径的1/2。行星轮1与中心轮3采用标准齿轮加工,两者要保证啮合完好,因此两齿轮模数m1=m3,两齿轮齿数之比z1∶z3=1∶2。
1.3 卡登圆行星机构的运动分析
机构运动过程中导杆2经过坐标原点OH做往复直线运动,因此θ2为定值。在ΔOHOO1中,有几何关系:
∠OHOO1+∠OOHO1+π-θ1=π,
(15)
θ1=2(θ2-θH)。
(16)
根据图1,采用复数矢量法[5]作为卡登圆行星机构的运动分析法,将行星轮1等效为杆矢量。通过封闭图形ΔOHOO1建立矢量方程:
(17)
改写为复数形式如下:
lHeiθH+l1ei(θH+θ1)=seiθ2。
(18)
采用欧拉公式将复数方程(18)的实部与虚部分离:
lHcosθH+l1cos(θH+θ1)=scosθ2,
(19)
lHsinθh+l1sin(θH+θ1)=ssinθ2。
(20)
平方求和,整理得到:
s2=2l2×(1+cosθ1)。
(21)
其中l=l1=lH,利用倍角公式化简得到导杆的位移表达式:
(22)
将式(21)对时间求导可得导杆的速度表达式为:
Vs=2l×ωHsin(θ2-ωHt)。
(23)
继续对时间求导,得导杆的加速度表达式为:
(24)
2 机构的运动学仿真分析
对于如图1所示的卡登圆行星机构,已知l1=lH=20 mm,行星轮1的齿数Z1=20,中心轮3的齿数Z3=40。行星架H的转速ωH=0.8π rad/s,θ1的初始值θ10=0°,导杆安装角度θ2=0°。
根据以上条件,在SolidWorks中建立卡登圆行星机构的仿真模型见图2。
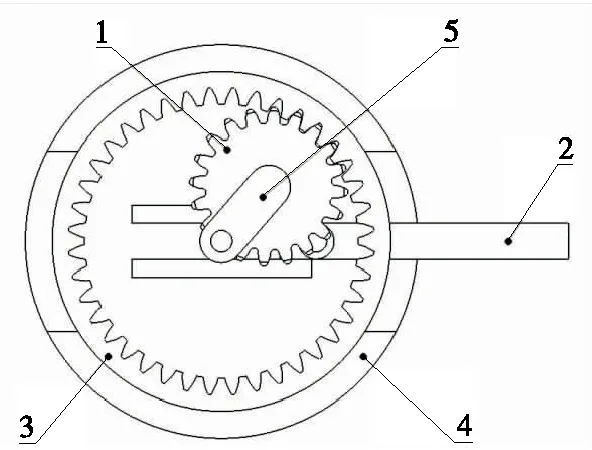
1. 行星轮 2. 导杆 3. 中心轮 4. 壳体 5. 行星架H图2 卡登圆行星机构的仿真模型Figure 2 Simulation model of the Carden circle planetary mechanism
不考虑齿轮啮合的碰撞冲击载荷作用,利用SolidWorks中的motion分析模块,得到了导杆的线性位移、线性速度、线性加速度随时间变化的曲线,与理论的曲线分别见图3、4。
分析图3、4可知,导杆2理论上以周期T=2πs做正弦(余弦)往复变速直线运动,其行程为80 mm;与表1模拟分析中得到的结果与理论计算的结果非常吻合,验证了该模型的正确性。
导杆2在与壳体4中的滑槽内做往复直线运动,提取该滑动副的两个侧接触面之间的接触力随时间的变化关系曲线,见图5。

图3 导杆2的模拟分析结果Figure 3 Simulation analysis results of the bar 2
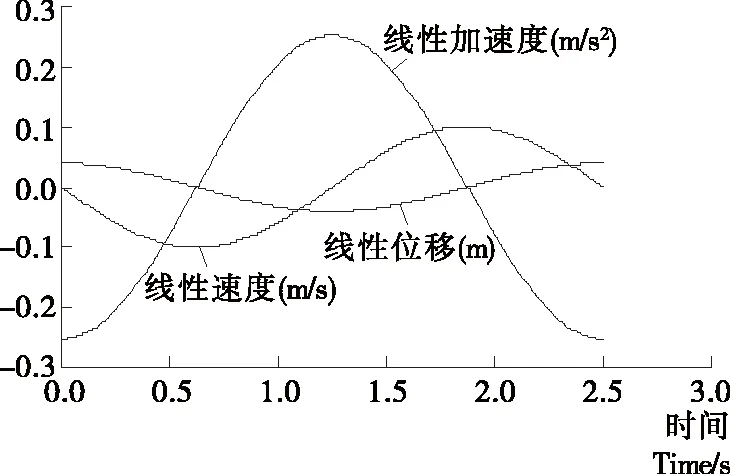
图4 导杆2的理论计算结果Figure 4 Theoretical calculation results of the bar 2表1 模拟分析与理论计算的结果对比Table 1 Comparison between simulation analysis and theoretical calculation
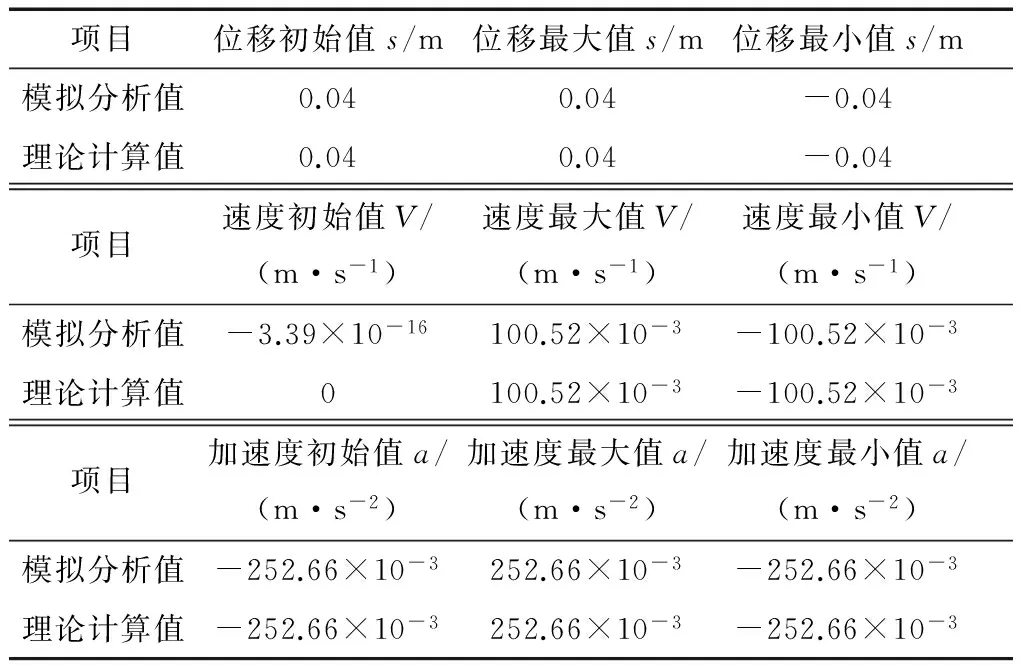
项目位移初始值s/m位移最大值s/m位移最小值s/m模拟分析值0.040.04-0.04理论计算值0.040.04-0.04项目速度初始值V/(m·s-1)速度最大值V/(m·s-1)速度最小值V/(m·s-1)模拟分析值-3.39×10-16100.52×10-3-100.52×10-3理论计算值0100.52×10-3-100.52×10-3项目加速度初始值a/(m·s-2)加速度最大值a/(m·s-2)加速度最小值a/(m·s-2)模拟分析值-252.66×10-3252.66×10-3-252.66×10-3理论计算值-252.66×10-3252.66×10-3-252.66×10-3

图5 滑动副中的接触力F随时间t的变化关系Figure 5 The change of contact force F with time t in the slip pair
分析可知在不考虑重力的情况下,导杆2与壳体4之间的接触力始终为零;而传统的曲柄滑块机构中由于摇杆周期性的相对于滑块的摆动,使滑块挤压在滑槽中,滑动副始终存在周期性变化的接触力,长期摩擦磨损使曲柄滑块机构的精度降低,增加了能耗,缩短了使用时间。因此,卡登圆行星机构相对于传统的曲柄滑块机构在往复直线运动中更有优势。
3 卡登圆行星机构的具体应用
3.1 运动要求分析
导杆2的运动特性参数对卡登圆行星机构的应用场合有着很大的影响。例如,应用在滚筒式平版印刷机的自动送纸装置、纺织机械、液压泵、造纸机械中的压力机有正弦机构。工作过程中要求速度的变化越小,则加工质量越好,降低速度的波动使杆件的运动尽可能平稳[6-8]。而对于牛头刨床,为了提高工作效率,减小空行程时间,要求输出机构具有急回特性,为了提高刨削的表面粗糙度,延长刀具的使用时间,还要输出装置在工作过程中保持速度尽可能的平稳[9]。农业机械中的后插式水稻分插机构,在取秧过程中要求秧针速度慢,防止撕扯秧块伤害秧苗根部,在推秧过程要求秧针迅速完成推秧动作,提高生产效率[10]。而食品机械中通常需要较小的传动力,较大的行程速比系数,从而完成物料的定量运送、灌装及制品的压制成型动作[11-12]。
通常情况下有以下方式可以改变机构的输出特性来达到合适的运动要求:① 在输入条件一定的情况下,通过将机构各部件的相关尺寸参数设为设计变量,建立需要的目标函数来进行结构优化设计;② 在机构各部件的尺寸参数已经确定的情况下,通过改变输入的运动规律,也可以影响机构输出的运动特性。
3.2 变速输入时导杆的运动方程与分析
实际工作过程中应用卡登圆行星机构,需要考虑空间结构布置,会对机构各部件的参数优化产生制约作用。因此在结构尺寸一定的情况下,采用叠加非圆齿轮装置使机构的动力输入不再呈匀速规律,从而改变机构的运动特性来达到工作要求。这种方式具有简单有效、灵活方便的特点[13]。
采用椭圆齿轮,这是一种常见的非圆齿轮。当卡登圆行星机构的输入轴由一对椭圆齿轮来驱动时,如图6所示。
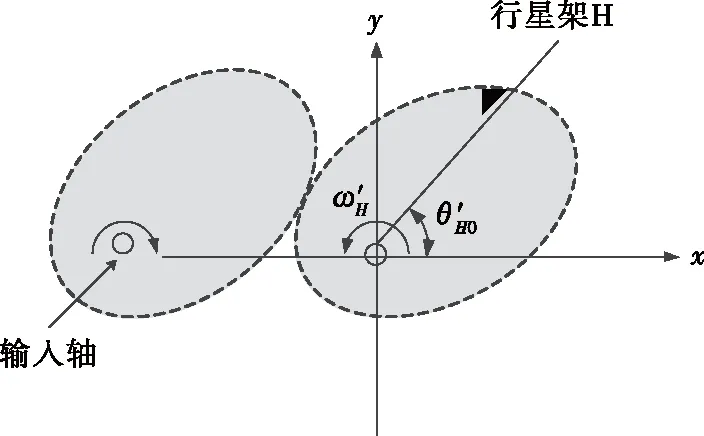
图6 采用椭圆齿轮驱动的机构Figure 6 The Mechanism driven by elliptical gears
椭圆齿轮的传动比[14-15]:
(25)
式中:
e——非圆齿轮的离心率;
m——椭圆的阶数;
α——输入端的旋转角度,rad。

(26)

(27)
其中:
(28)
代入式(22),得导杆的位移表达式:

(29)
对时间t求导,得导杆的速度表达式:
(30)
其中:
(31)
继续求导,得导杆的加速度表达式:
(32)
其中:
(33)
(34)
(35)

(1) 保持其它参数不变,只改变椭圆齿轮的离心率e,如图7(a)所示,分析可知,离心率e影响了导杆2的速度峰值及出峰时间。e越大,导杆2的速度峰值越大,速度曲线平稳区间所占周期比增加;如图8(a)所示,离心率e影响了导杆2的加速度极值。e越大,导杆2的加速度极值越大,此时导杆2有急回特性。
(2) 保持其它参数不变,只改变椭圆的变性阶数m,如图7(b)所示,在一定的范围内适当地减小变性阶数m,导杆2的运动周期变长,此时低速平稳区间延长,速度最值之间连线的斜率减小;如图8(b)所示,导杆2的加速度波动次数增加,因此改变m可以提升机构的运动平稳性。同时,在设计椭圆齿轮中可以通过对变性阶数m的微调来使轮齿均匀地分布在节曲线上,便于椭圆齿轮的加工。


图7 导杆2的速度随时间的变化曲线Figure 7 The curve of the speed of guide bar 2 with time
4 结论
本试验通过建立卡登圆行星机构数学模型的同时借助SolidWorks运动仿真得到机构的运动参数,得出以下结论:
(1) 通过复数矢量法得到了卡登圆行星机构的数学模型,运用软件模拟分析得到机构的运动参数,结果表明理论分析得到的运动曲线与模拟的结果吻合,同时,通过接触力分析表明该机构与普通的曲柄滑块机构相比在食品机械中的往复直线运动的应用更有优势。
(2) 通过合理组合椭圆齿轮中椭圆的离心率、变性阶数以及行星架的初始角度,可以有效调整机构的运动特性,采用椭圆齿轮的卡登圆行星机构能实现导杆的等速运动,并且具有急回特性,提高了机构在工程中的适应性。
(3) 在满足机构输出特性要求的前提下,通过椭圆齿轮参数的动态设计,可以全面了解基于非圆齿轮的卡登圆行星机构的运动状态,从而提高机构的设计效率,得到期望的机构输出特性。
图8 导杆2的加速度随时间的变化曲线Figure 8 The curve of the acceleration of guide bar 2 with time
(4) 实际应用该机构时,需要考虑提高行星轮和中心轮的加工精度,对齿轮副采用标准侧隙进行安装,同时定期进行润滑,从而使机构实现精确的运动。
[1] 李福生. 非圆齿轮[M]. 北京: 机械工业出版社, 1979: 1-5.
[2] 杜白石, 杨福增. Pro/E行星齿轮机构设计与分析[M]. 北京: 电子工业出版社, 2014: 392-393.
[3] 陈赛克, 凌轩. 基于Solidworks齿轮连杆机构的运动仿真[J]. 食品与机械, 2012, 28(6): 177-179.
[4] 张荣江, 郭非. 卡登圆-扭杆弹簧无级变速器的构思[J]. 机械设计, 1991(6): 32-34.
[5] 孙桓, 陈作模, 葛文杰. 机械原理[M]. 7版. 北京: 高等教育出版社, 2006: 32-43.
[6] 胡紫阳, 杨辉, 李大柱, 等. 平流泵用非圆齿轮副的优化设计及实验分析[J]. 中国机械工程, 2016, 27(22): 3 082-3 087.
[7] KUCZEWAKI M. Desiging elliptical gears[J]. Machine Design, 1988, 4(7): 116-118.
[8] BROWN J. Noncircular gears make the unconventional moves [J]. Power Transmission Design, 1996(3): 29-31.
[9] 张义民, 黄贤振, 张旭方, 等. 不完全概率信息牛头刨床机构运动精度的可靠性优化设计[J]. 中国机械工程, 2008, 19(19): 2 355-2 358.
[10] 俞高红, 张玮炜, 孙良, 等. 偏心齿轮-非圆齿轮行星轮系在后插旋转式分插机构中的应用[J]. 农业工程学报, 2011, 27(4): 100-105.
[11] 黄鹏飞. 平面连杆机构力学特性研究[J]. 食品与机械, 2017, 33(5): 125-127.
[12] 张国平. 基于证据理论的曲柄滑块机构可靠性优化设计[J]. 食品与机械, 2011, 27(2): 88-90.
[13] 高雪强. 非圆齿轮传动技术概述[J]. 机械传动, 2003, 27(3): 5-8.
[14] 贺敬良, 吴序堂, 李建刚. 变性椭圆齿轮连杆机构的运动特性及齿轮副设计[J]. 机械工程学报, 2004, 40(1): 62-65.
[15] 王淑杰, 吕新生. 椭圆齿轮传动的优化设计[J]. 机械传动, 2004, 28(4): 17-18.
