车载充电机的无模型功率控制研究
2018-05-02陈乾辉吴德刚
陈乾辉,吴德刚
(商丘工学院 机械工程学院,河南 商丘 476000)
电动汽车电池技术已经成为衡量电动汽车品质的核心技术之一,作为连接电池系统与电网的接口,电池充电器是实现电池高效、快速充电的核心[1].目前,最常见的两种电池充电器是车载充电机和充电桩[2].车载充电机一般采用功率因数校正(Power factor correction,PFC) AC/DC变换器和全桥DC/DC变换器级联的结构形式,前端PFC AC/DC变换器不仅能将电网的AC转换为DC,还可以实现PFC,后端则可实现电池系统的智能充电[3,4].然而,由于PFC AC/DC变换器的性能直接影响充电机接入电网后电能的质量(比如多次谐波使电网电压畸变,设备损坏等)、电池组的充电效率、电池的寿命等[5,6],因此,如何实现PFC AC/DC变换器的高性能控制,成为我们亟待解决的难题.
目前,PFC AC/DC变换器的控制策略主要有平均电流控制、非线性控制、基于微分平坦控制的PFC AC/DC变换器功率控制方法、无模型控制(Model-free control,MFC)方法等[7,8].在采用这些控制方法的过程中,存在抗干扰能力弱、动态特性差、模型的不确定性、未知扰动的动、静态性能的鲁棒性,针对上述控制方法存在的缺陷,提出了车载充电机PFC AC/DC 变换器的无模型功率控制(Model-free power control,MFPC),该方法根据PFC AC/DC变换器的输入、输出(I/O)建立超局部模型(Super-partial Model,SPM),进而设计相应控制器,该控制器控制结构简单,且对系统内外干扰、测量噪声、模型动态等有很强的鲁棒性.
1 无模型控制
将一单输入单输出(Single input single output,SISO)非线性系统的数学模型用SPM表示为
y(v)=F+αu,
(1)
其中,y——系统输出变量;y(v)——y的v阶微分值;v——大于等于1的整数,一般选1或2;u——系统输入变量;F——SPM中的未知部分,包括未知参数和内外部干扰;α——不具备物理意义的常数,保证αu和yv的幅值在同一数量级.
取v=1,由式(1)可得SISO系统的SPM,即
(2)
基于SPM的无模型控制器可表示为
(3)

(4)
由式(3)和(4)可知,MFC系统可表示为
(5)
其中,e=y*-y.由式(5)可知,ζ选择越恰当,系统输出越稳定.
若ζ选用比例控制,则无模型控制器可表示为
(6)
其中,Kp——比例系数.
由于未知部分的准确性决定系统的控制精度,当时间很小时,F近似为常数,因此,式(2)可近似为

(7)
其中,θ——分段常函数.
对式(7)做拉普拉斯变换,可得:
(8)
其中,y0——y在采样区间的初始值.
对等式(8)两侧求s的微分,可得:
(9)
为了滤除噪声,需在等式(9)两侧同乘s-2,可得:
(10)


(11)
其中,Ts——采样频率;nF——窗口序列长度;[0,nFTs]——非常短的滑动的时间窗口.
特别注意,u[0],u[1],…,u[nF]和y[0],y[1],…,y[nF]分别为系统I/O的采样值.
nF和α选择越恰当,F的预估越准确,无模型控制器的控制能力越强.若输出参考值含有噪声,则输出参考值的微分可通过式(12)获取.
(12)
2 PFC AC/DC 变换器的MFPC
根据PFC AC/DC 变换器的工作原理,选择恰当的I/O,根据I/O构建PFC AC/DC 变换器的SPM,并在PFC AC/DC 变换器的SPM基础上,设计无模型电流-功率控制器,实现PFC AC/DC 变换器MFPC.
车载充电机前端PFC AC/DC 变换器的状态方程为
(13)
该系统的平坦输出为输入功率pin与占空比d的关系为
(14)
其中,
为实现变换器的MFPC,以pin为系统输出,d为系统输入,由式(2)可得PFC AC/DC 变换器的SPM,即
(15)
由式(14)可知,SPM的未知部分包含 中的各种内外部干扰,为实现系统控制的精确性,α与B的取值应相似.
由PFC AC/DC 变换器SPM获得无模型电流-功率控制器,即
(16)

(17)
(18)

(19)
为实现对系统状态的准确估计,α应时刻随系统变化,即
α=c|vin|Vo,
(20)
其中,c是与电感值L相关的常数.
3 系统建模与仿真
根据上述车载充电机前端PFC AC/DC 变换器的控制器的设计,建立MFPC的PFC AC/DC 变换器的仿真模型,以电阻模拟车载充电机的恒流充电过程,仿真模型如图1所示.

图1 MFPC的PFC AC/DC 变换器的仿真模型
3.1 α仿真验证
给定控制器参数:nD=15,nF=15,Kp=le5,若α为变值,c=1e-4,若α为恒值,c=1e-9.α在恒值和式(20)所描述系统变值两种情况下,验证系统的控制能力.
给定参数:vin(rms)=220 V,P0=2 KW.

图2 恒α时

图3 恒α时和pin
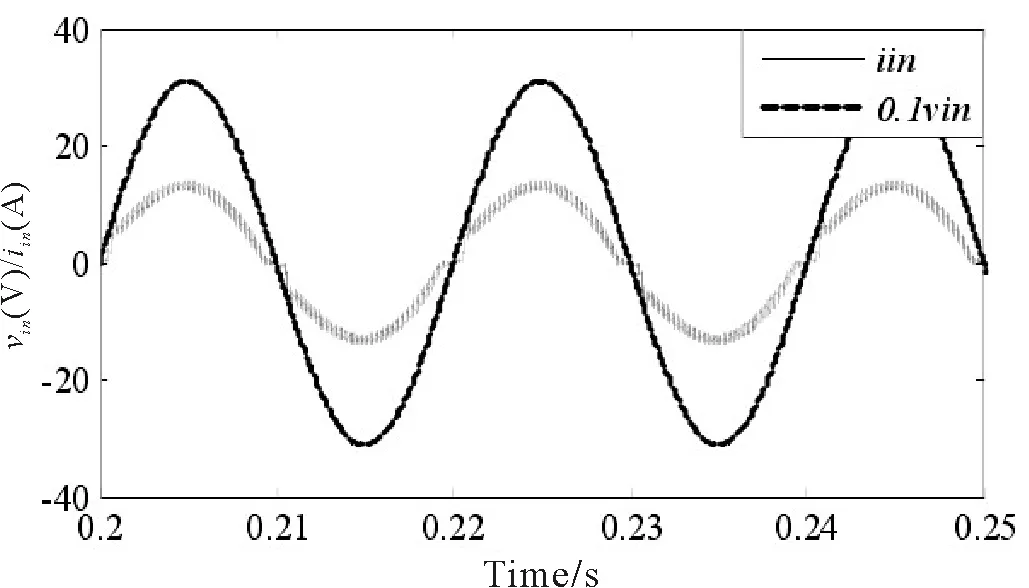
图4 恒α时vin和iin

图5 恒α时V0
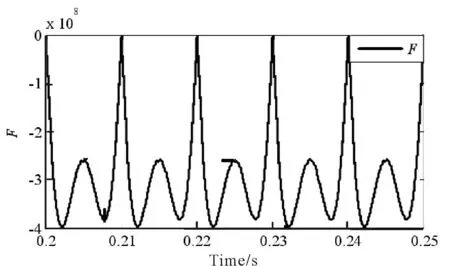
图6 变α时

图7 变α时和pin

图8 变α时vin和iin
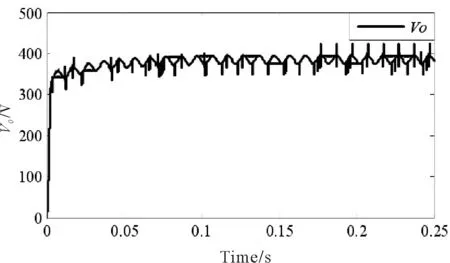
图9 恒α时V0
3.2 抗干扰实验、仿真验证
给定参数:vin(rms)=220 V,P0=1.7 KW,负载0.2 s后突变到2 KW.
MFPC的车载充电机 PFC AC/DC 变换器的iin如图10所示,V0如图11所示.仿真结果表明:MFPC的PFC AC/DC 变换器的iin在负载突增时,能瞬时到达新稳态;V0从327 V经过短时电容恒流充电平稳到达385 V.
给定参数:vin(rms)=220 V,P0=2 KW,测试电容由990 μF降到660 μF.
MFPC的车载充电机 PFC AC/DC 变换器的V0如图12所示.测试电容变化时,MFPC的变压器V0在0.035 s后到达新稳态,具有很强的鲁棒性.
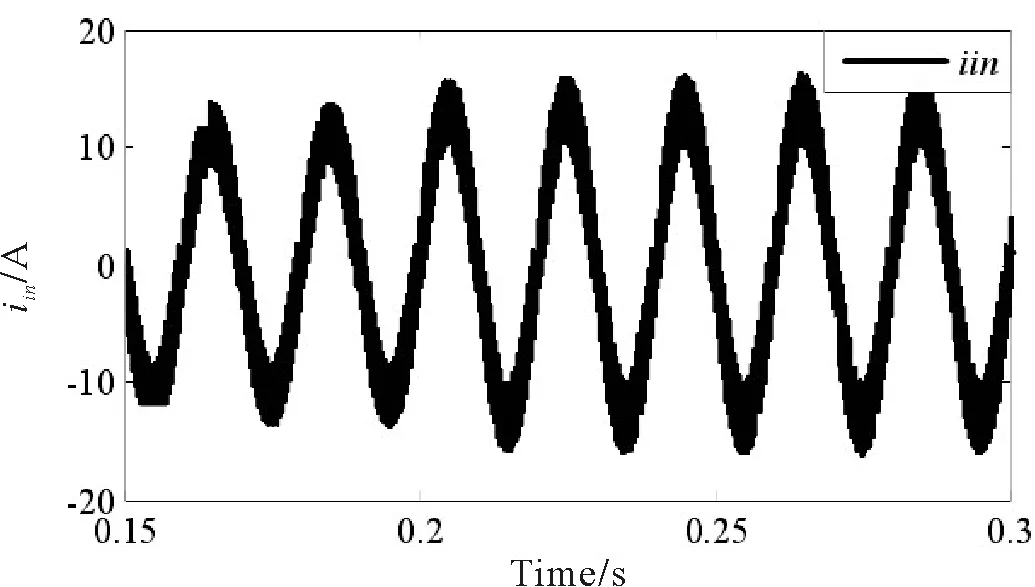
图10 负载突变时MFPC下的iin

图11 负载突变时MFPC下的V0
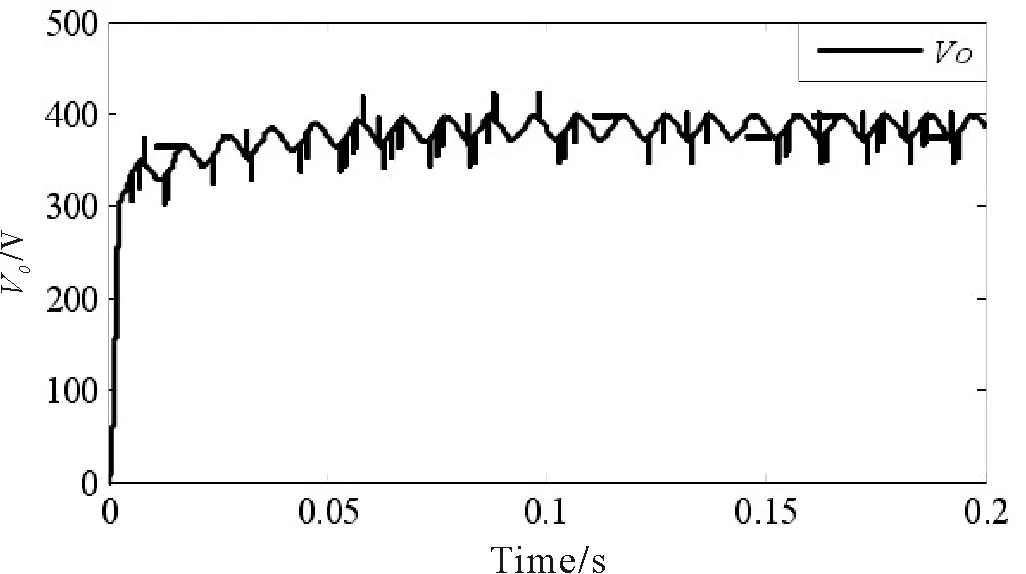
图12 测试参数变化时MFPC下的V0
4 结语
针对常用PFC AC/DC变换器控制存在的缺陷,提出了车载充电机 PFC AC/DC变换器的MFPC研究,实验、仿真结果表明,该方法不仅结构简单,且在变α下MFPC的PFC AC/DC 变换器的电流谐波失真值仅为1.21%,参数变化时,V0在0.035 s左右的时间可以从327 V平稳到达385 V,具有更好的动态性、更高的功率因数和更强的鲁棒性,完全满足对新能源汽车低碳减排的需要.
参考文献:
[1] 刘红丽,马正来,聂 鹏.4KW电动汽车车载充电机的研究与实现[J].电气传动,2017,47(2):20-13.
[2] Musavi F,Craciun M,Gautam D S,et al.An LLC Resonant DC-DC Converter for Wide Output Voltage Battery Charging Applications[J].IEEE Trans.Power ELectron, 2013, 28(12):5 437-5 445.
[3] 曹灵灵.车载充电机 PFC AC/DC变换器的高性能控制[D].合肥:合肥工业大学,2017.
[4] 郭晓丹,李晓辉,李 磊,等.300KW非车载充电机现场检定系统的设计[J].电测与仪表,2017,54(8):123-128.
[5] 黄菊花,何剑平,曹 铭.电动汽车电池管理系统抗工频磁场设计[J].电测与仪表,2016,42(7):80-82.
[6] 胡 勇.电动汽车交流充电桩控制装置的研究与设计[D].绵阳:西南科技大学,2017.
[7] 杜常清,潘志强,赵奕凡,等.电动汽车车载充电系统研究[J].电源技术,2016,40(6):1 277-1 279.
[8] 陈小虎,陈息坤.新型混合动力电动汽车车载充电机的研究[J].电气自动化,2015,37(6):21-25.