基于巨磁电阻传感器的磁珠检测方法
2018-04-27高晓光何秀丽李建平
黄 晗, 高晓光, 何秀丽, 贾 建, 李建平
(1.中国科学院 电子学研究所 传感技术国家重点实验室,北京 100190; 2.中国科学院大学,北京 100190)
0 引 言
巨磁电阻(giant magnetoresistance,GMR)生物传感器具有检测速度快、灵敏度高、生物特异性强、所需样品量小的优点,而且仪器易于小型化和集成化[1~3],非常适合现场快速检测。美国海军实验室于1998年首先提出了利用GMR效应[4]和免疫磁标记进行生物检测的设想,并通过测量DNA验证了其可行性[5]。2002年,美国斯坦福大学Li G X等人提出了交流磁场激励方法,借助锁相放大器实现对2.8 μm粒径磁珠的检测[6]。2014年,Cheng C Y等人利用简单的永磁体装置实现了对纳米磁珠的检测。
GMR生物传感器利用对磁珠的检测间接实现对生物样品的分析,传感器对磁珠的检测能力决定着对生物样品的检测限及灵敏度[7]。除了GMR传感器自身性能外,磁场激励模式及信号检测方法也是影响磁珠检测效果的重要因素。由于激励磁场均匀性对磁珠检测影响很大,目前研究中大多采用亥姆霍兹线圈产生激励磁场[7,8],导致整个检测装置体积较大。
此外,目前广泛使用的微米粒径磁珠在进行小分子检测时灵敏度和特异性下降,运用纳米磁珠作为标记物正成为GMR生物传感器的发展方向[9]。然而随着磁珠粒径的减小,磁珠磁化后产生的磁场变化也十分微弱,对磁珠检测也提出了更高的要求。
针对生物磁珠检测需求,本文根据所用的GMR传感器工作原理及特点,研究不同磁场激励方式及输出信号处理方法,设计制作了磁珠检测装置,实现了纳米磁珠检测。
1 GMR传感器磁珠检测方法
1.1 多层膜GMR传感器
本文选用多层膜GMR传感器实现磁珠检测,其GMR敏感薄膜由铁磁层和非铁磁层交替生长组成,在零磁场下呈现高阻态,在一定外加磁场下呈现低阻态,其电阻值随外加磁场在薄膜水平面分量的变化如图1所示。
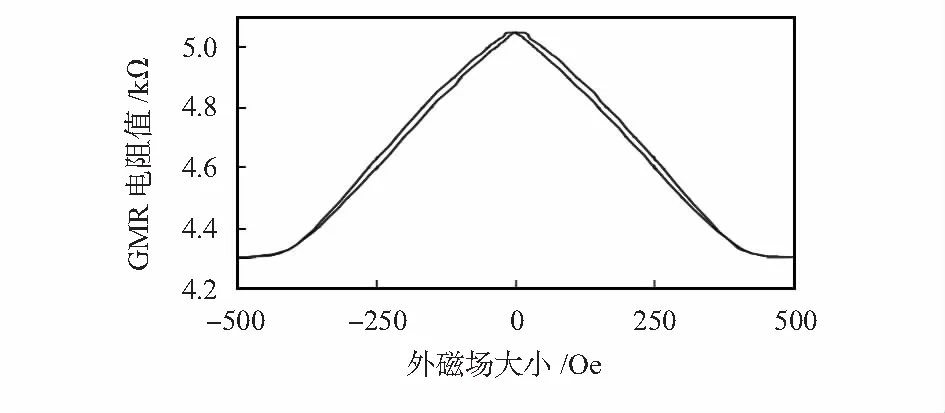
图1 多层膜GMR薄膜电阻值随外磁场的变化
方便起见采用NVE公司多层膜GMR传感器(AA002-02)裸片进行磁珠检测,该传感器由4个多层膜GMR电阻条构成惠斯通电桥结构,其结构及等效电路如图2所示。传感器芯片上两端的GMR电阻条受到聚磁层屏蔽作用而基本不受外磁场影响,为惠斯通电桥中参考电阻R1和R2,中间位置的2个电阻处于聚磁层磁场强化区,其电阻值随外磁场的变化而变化,是惠斯通电桥中的敏感电阻Rx。GMR敏感电阻器表面有约100 nm厚的氮化硅绝缘膜保护,其所在的区域大小约200 μm×35 μm,传感器的线性区为1.5~10.5 Oe。当沿着GMR电阻条方向施加磁场,处于聚磁层磁场强化区的GMR电阻条阻值减小,由于多层膜GMR电阻变化具有全极性的特点,电阻条阻值的变化只与电阻条方向上的磁场大小相关,而与其方向无关,因此GMR传感器电桥输出信号只反映施加在GMR电阻条方向上磁场的大小。

图2 GMR传感器示意
1.2 磁场激励模式比较
免疫磁珠为超顺磁材料,本身没有磁性,在检测的过程中需要对磁珠施加激励磁场。根据激励磁场方向,其模式可分为水平模式与垂直模式[10]。
为了保证传感器正常工作,要求激励磁场在传感器敏感方向的分量在传感器线性区内。水平模式下施加最大激励磁场约为10 Oe;垂直模式能施加的激励磁场大小取决于磁场倾斜程度,本文施加200 Oe的垂直激励磁场。仿真时只对单个磁珠产生的附加磁场进行分析,计算GMR薄膜各个位置电导率的变化,进而得到磁珠导致GMR阻值的变化值。利用COMSOL软件对2种激励模式下磁珠产生附加磁场的仿真结果如图3所示。结果表明:在垂直模式下磁珠在传感器上产生的信号约为水平模式的44倍。对于多层膜GMR传感器,垂直施加激励磁场,可以大幅提高磁珠产生的附加磁场大小,因此,本文采用垂直模式对磁珠进行检测。

图3 磁珠产生的附加磁场
1.3 信号检测方法
GMR传感器噪声主要由白噪声和1/f噪声组成。1/f噪声存在于所有磁性和非磁性系统中,概括性描述[11]为
(1)
式中γH为Hooge常数;V为工作电压;f为工作频率;NC为引入的计算常数。从式(1)可以看出,影响1/f噪声的主要因素为工作电压与工作频率,噪声的大小与工作电压成正比,与工作频率成反比。
为了有效降低传感器的1/f噪声,在电桥两端施加频率为ω0的正弦调制电压
ui=Usin 2πω0t
(2)
假设在磁场作用下GMR电阻条阻值的变化为ΔR, GMR电阻值为
Rx=R+ΔR
(3)
传感器电桥的输出信号为
(4)
在GMR电阻的线性范围内,电阻值的变化量ΔR与沿传感器敏感方向的外磁场Bx的大小存在线性关系
ΔR=kBx
(5)
式中k为比例系数。
若外磁场为直流磁场,敏感方向分量的大小为B1,由于ΔR≪R,由式(2)~式(5)得
(6)
传感器输出的正弦信号幅值与外磁场大小呈线性关系。

(7)
传感器输出信号
(8)
对式(8)进行傅里叶展开得到
sin 2π(ω0-ω1)t]
(9)
可知,外磁场的大小与ω0+ω1,ω0-ω1的幅值成正比,而施加的偏置磁场仅与ω0频率分量的信号相关。
采用交流磁场激励能够大幅降低传感器的1/f噪声,提高传感器的探测能力[12],并且采用交流磁场测量可以避免地磁场、工频噪声与高频电磁噪声的干扰。由于对传感器电桥工作电压与外加磁场进行交流调制均能降低传感器的噪声,本文采用电桥工作电压及激励磁场双调制的方法,通过分析ω0与ω1的和频信号来计算磁珠产生的附加磁场,既可减小1/f噪声与环境杂散磁场的影响,还可进一步减小激励磁场电源、电桥电源中频率为ω0和ω1的噪声干扰影响,大幅提高了传感器的信噪比。
2 实验部分
2.1 实验装置
实验装置结构如图4所示,包括激励磁场模块、GMR传感器及信号检测模块。
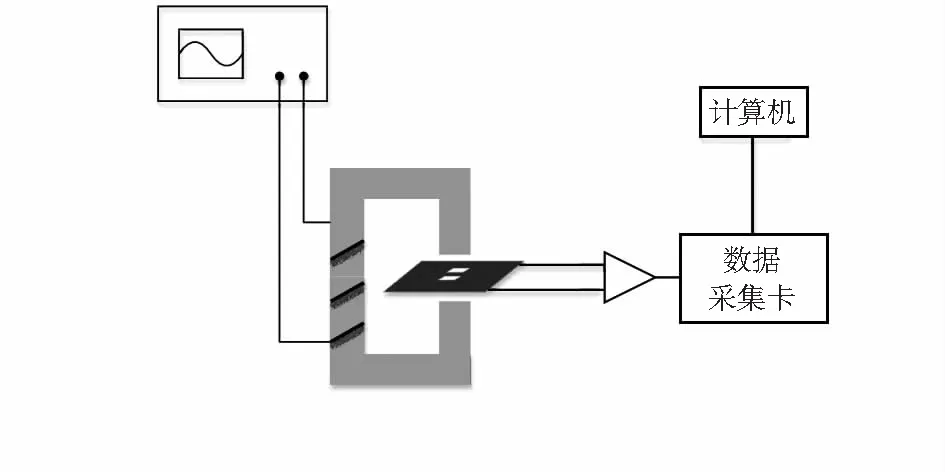
图4 实验装置结构示意
实验中利用金丝球焊将2个传感器裸片封装于一块印刷电路板(printed circuit board,PCB)板上,分别作为实验和对照传感器。
激励磁场由带有气隙的电磁铁产生,其尺寸为120 mm×90 mm×50 mm,比常规使用的亥姆霍兹线圈体积更小。电磁铁气隙宽度10 mm,电磁铁匝数245匝,仿真结果表明:该电磁铁气隙中心±2 mm范围内,垂直磁场大小的变化率仅为0.5 %,可以认为PCB上的2只GMR传感器处于同一匀强激励磁场内。为了方便激励磁场参数调整,利用TDA2030a音频功放电路放大信号发生器(Agilent 33500B)产生的正弦信号以驱动电磁铁。
信号检测模块包括基于AD620的微弱信号放大器、PCIe—6351(NI公司,基本性能)数据采集及个人计算机。GMR传感器电桥输出信号经放大后以10 kHz采样率输入计算机进行信号处理。
2.2 磁珠检测方法
实验采用的磁珠(倍思乐公司Affimag SLE)饱和磁化率大于27.2 emu/g。在实验传感器的GMR敏感电阻条表面滴加0.2 μL磁珠溶液,溶液干燥后磁珠分布在GMR电阻条上。在外加磁场激励下磁珠产生磁信号被传感器检测出来,利用数据采集卡分别采集滴加磁珠前后的信号,其差值作为磁珠产生的信号。实验后酒精擦拭传感器表面,并酒精超声2 min除去GMR表面附着的磁珠。
3 结果与讨论
3.1 直流与交流激励磁场的对比
分别在直流激励磁场和交流激励磁场下进行1 μm粒径磁珠的检测,传感器电桥电压均采用1 kHz的正弦交流调制。
对于直流激励,给传感器表面的磁珠施加200 Oe的直流磁场,传感器输出的信号为正弦交流信号。在计算机上对采集到的信号进行频谱分析,计算出磁珠产生的信号值。对于交流激励,利用电磁铁在磁珠上产生频率为200 Hz,峰值为200 Oe的交流磁场。传感器输出的信号为2个频率信号的包络。利用计算机对信号进行解析,得到磁珠产生的信号。
表1为直流激励磁场下0.5 g/L磁珠溶液测量结果。从表1可知,采用差分测量的信号标准差小于实验传感器输出的标准差。说明GMR传感器在测量过程中会受到环境杂散磁场的影响,且由于每次实验时无法保证传感器处于激励磁场同一位置,传感器位置的差异也会带来测量误差。而2只传感器受到这2个因素的影响大致相当,采用差分测量可以有效减小这些因素带来的误差,降低磁珠的检测限。

表1 直流激励磁场下0.5 g/L磁珠测量结果
通过分析计算可得,滴加0.2 μL 0.5 g/L的磁珠溶液后,磁珠在GMR传感器表面的覆盖率(磁珠覆盖的面积与GMR电阻条区域面积的比值)约为13.5 %,传感器表面磁珠数量约为1 200个。测量得到传感器的基值信号标准差为1.96 mV。计算得到该方法对粒径1 μm磁珠的检测限约为200个。
表2为交流磁场激励下的0.1 g/L的磁珠溶液测量结果,传感器的基值信号标准差为0.226 mV,磁珠测量的检测限约为30个。

表2 交流激励磁场下0.1 g/L磁珠检测结果
*基值及滴加磁珠后信号均为实验和对照传感器的差分信号。
由表2可知,在交流激励磁场下GMR传感器对磁珠的检测限较直流激励磁场下的检测限小一个量级,并且基值信号标准差更小。这是因为直流磁场激励下,磁珠附加磁场信号受到电路噪声与环境磁场的干扰,传感器输出的信噪比低。交流磁场激励下磁珠产生交流附加磁场,传感器输出为交流信号,通过频谱分析可提取出与磁珠附加磁场相关的微弱信号,有效的减少了噪声干扰,提高传感器输出的信噪比。
3.2 微米磁珠检测
利用双调制的方法检测了0.1~0.5 g/L 5种不同浓度的1 μm磁珠溶液,每个浓度进行5次实验,取平均值作为测量结果,图5为GMR传感器差分信号强度与磁珠浓度关系的曲线。GMR传感器的输出信号随着磁珠浓度的增加而增加,在0.1~0.4 g/L的范围内呈线性关系,拟合指数R2=0.996 1。

图5 传感器对1 μm磁珠的响应—浓度曲线
随着磁珠溶液浓度的增加,传感器表面磁珠团聚现象变得明显,磁珠的团聚使GMR的信号减小[13]。这是影响传感器响应—浓度曲线线性度的主要因素。
3.3 纳米磁珠检测
在传感器表面滴加0.5 g/L粒径为200 nm的磁珠溶液,对其进行5次测量,得到实验组与对照组差分信号如表3所示。
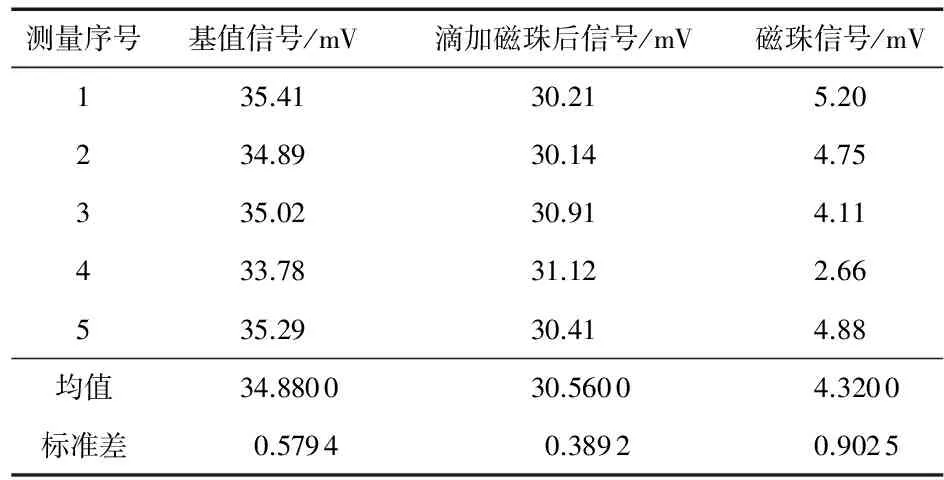
表3 GMR传感器对200 nm磁珠的响应
从表3可以看到,GMR传感器在滴加磁珠后产生了响应,并且传感器在超声清洗过后恢复了原始信号。磁珠受团聚等因素影响,一些实验中产生的信号偏差较大。
4 结 论
本文分析了多层膜GMR传感器的响应特点,设计了采用电磁铁激励的磁珠检测装置,对比不同激励磁场下对磁珠的检测效果。利用差分模式和双调制的检测方式有效降低了环境杂散磁场及电路中电磁噪声的影响,实现微米磁珠的定量检测和纳米磁珠的定性检测。
参考文献:
[1] 程祖乐,王 琨,毛红菊,等.基于微球和微柱阵列芯片的浮滴数字PCR定量方法[J].传感器与微系统,2017,36(5):16-18.
[2] 崔传金,张 孔,张瑞成,等.生物传感器检测牛奶病原微生物的研究进展.[J].传感器与微系统,2016,35(2):1-4.
[3] 刘庆胜,冯 洁,郅 晓,等.基于GMR生物传感器的甲胎蛋白检测[J].微纳电子技术,2012,49(4):50-53.
[4] 柴秀丽,张延宇.巨磁阻抗磁传感器研究进展[J].传感器与微系统,2011,30(12)11-13.
[5] Tondra M,Porter M,Lipert R J.Model for detection of immobilized superparamagneticnanosphere assay labels using giant magneto-resistive sensors[J].Journal of Vacuum Science & Technology A Vacuum Surfaces & Films,2000,18(4):1125-1129.
[6] Li G,Joshi V,White R L,et al.Detection of single micron-sized magnetic bead and magnetic nanoparticles using spin valve sensors for biological applications[J].Journal of Applied Physics,2003,93(10):7557-7559.
[7] 杨 峰.自旋阀GMR传感器及免疫磁珠检测[J].测试技术学报,2016(2):132-136.
[8] 王永强,冯 洁,陈 翔,等.生物传感用巨磁电阻传感器及其磁珠检测性能[J].真空科学与技术学报,2009,29(4):359-363.
[9] 陈 扬,陆祖宏.生物分子的纳米粒子标记和检测技术[J].中国生物化学与分子生物学报,2003,19(1):1-4.
[10] Megens M,Prins M.Magnetic biochips:A new option for sensitive diagnostics[J].Journal of Magnetism & Magnetic Materials,2005,293(1):702-708.
[11] 张晓锋.巨磁电阻传感器的低频噪声抑制[J].磁性材料及器件,2012(6):38-41.
[12] 田武刚,胡佳飞,潘孟春,等.MEMS磁力线聚集和垂动调制磁场传感器[J].国防科技大学学报,2014(4):129-133.
[13] 李福泉,冯 洁,陈 翔,等.外磁场方位及磁珠位置和团聚对巨磁阻生物传感器检测的影响[J].光学精密工程,2010,18(11):2437-2442.
