基于SURF特征点的图像拼接技术研究∗
2018-04-27赵晓华
赵晓华
(陕西交通职业技术学院 西安 710018)
1 引言
随着人们生活水平逐步的提高以及信息技术的不断发展,人们对信息的传播需求也越来越大。由于数字图像具有存储便捷、携带方便、易于传输等特点,所以数字图像被人们广泛用于信息等的传播。伴随着数字图像的广泛应用,数字图像处理技术也得到了日新月异的发展,图像拼接技术作为数字图像处理技术之一,也越来越被人们重视[1~3]。
从数码照相机诞生之日起,它的便捷性和经济性就使其迅速在人群中推广开来,可是数码相机自身实现机制的限制使得数码相机的镜头焦距比传统胶片相机更小,更小的成像面积使得使用者在拍摄一些面积极为庞大的物体和影像时为了保证成像的高精度,不得不使用高级的广角镜头乃至超广角镜头,这些设备对于大众用户来说不仅价格过于昂贵,操作也十分复杂。但是数码影像的不确定性和易变性却可以很好地拿来利用,图像拼接技术便是在此特性之上应运而生,数码相机用户可以使用特定的计算机软件对自己的多个图像进行整合和拼接,同样可以得到高精度的广角成像[4~5]。由于通过图像拼接技术能够将多幅感兴趣的图像拼接成一幅完整且清晰的图像,所以图像拼接技术被广泛应用于包括医疗诊断、航天航空、军事探测在内的多种技术领域[6~7]。因此对图像拼接技术的研究具有非常重要的意义。对此,本文提出了基于SURF特征点的图像拼接技术研究。
2 基于特征点的图像配准技术研究
2.1 基于特征点的图像配准基本流程
图像配准方法大致来讲有三种技术根源,分别是灰度信息、交换域和特征点,本文研究的是基于特征点的图像配准技术。当然这样也是笼统的说法,即使是基于特征点的配准技术也有更为精确的细分。但是总的来说基于特征的匹配技术,首先都是对要进行匹配的图像进行初始化处理,一般是将图像进行划分和局部特征的识别和记录,再在提取到的特征值之上进行不同图像之间的聚类,从而建立不同图像直接的配准映射,使用的最为常见的特征是以坐标值表示的点特征。
该类方法的具体实现流程如图1所示。
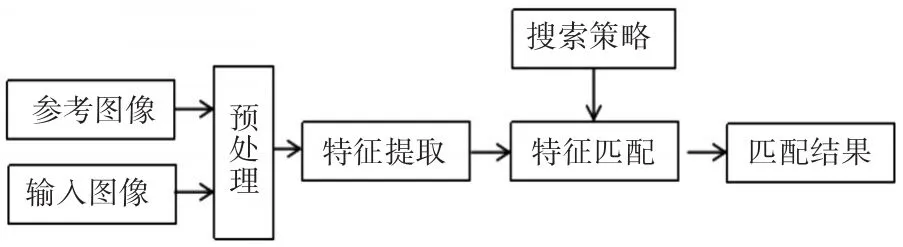
图1 基于特征的图像匹配过程
1)特征提取
一般本文是使用人工智能算法自动的检测图像的不变特征,选取特征的基本标准为:(1)提取的特征应该是图像中突出的且大量存在于画面易于区分的部分;(2)选取的特征应当有一定的客观抗干扰能力,即对拍摄时采光、镜头或者抖动等干扰有抵抗能力;(3)特征最终是用于两幅图像的配准,所以选取的特征在两幅图像里应当具有同步性。
2)特征匹配
选取出的特征,本文要用精确的抽象模型进行描述和记录,这个本文称之为特征描述算子。而两幅图像之间的特征的相似度也要用精确的量化标准去进行定义。然后本文就使用这两部分信息进行两幅图像之间的特质匹配工作。而且有些匹配算法甚至还完成了下一步的模型参数估计的工作。
3)变换模型估计
根据上一步的特质匹配工作得到的信息,本文建立起两幅图像之间的映射模型,最佳拟合不同图像之间的几何变换差异,并根据变换的程度本文将建立的模型分为全局映射或者局部映射。顾名思义,全局映射就是将所有特征点都用于模型的参数猜测,而局部映射就只用到了一部分特征值信息。一般来说用的最简单的也是最常见的就是多项式变换模型。
4)坐标变换与插值
建立起了映射模型后本文就可以对图像进行变换,让两幅图像处于一个参照系之下,这样就可以进行下一步的配准处理。而且这一步的变换计算是浮点计算,对于精度的要求是之后成像精确的重要影响因子之一,所以本文还需要特殊的数值计算算法来处理。这里用到的最多的数值计算方式是插值法。
2.2 特征点的提取
2.2.1 基于模板匹配的方法
此类方法需要预先进行特征模版的设定,设定好模块各项量化标准后,就直接将模块跟待处理图像进行相似性对比,满足一定相似度的子窗口像元就是本文需要的特征点。但是这种方法需要的时间太长,而且不同的图像要建立不同的模型,兼容性不强,只能处理小规模的图像特征点提取工作。
2.2.2 基于几何特征的点提取算法
此类方法本文又要进行细分:一种方法关注图像的边界信息,将图像进行分割,并且对分割后的子图象的边界信息进行特征提取,日后进行对比的也是不同的子图象的模式识别,这种提取思路的时间复杂度极其不乐观,可是对图像内的噪点干扰有很好的抗性;另一种方式关于图像的灰度,直接从图像的灰度信息中进行特征提取,这种方法的实现十分简单。
2.2.3 基于Harris角点检测算法
Harris角点检测算法的基本原理是取一个以目标像素点为中心的小窗口,计算该窗口沿任意方向移动后的灰度变化,并用解析形式表达。假设以像素点(x,y)为中心,Harris算法给出的灰度变化量的表达式如下式:
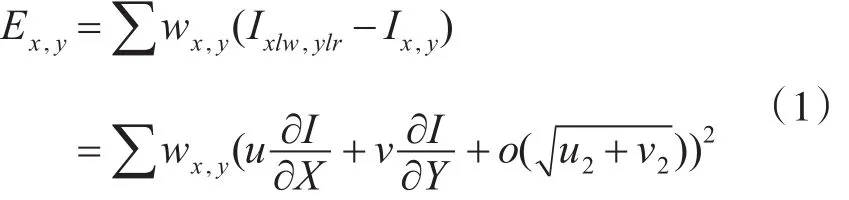
其中,Ex,y表示窗口内的灰度变化量,wx,y表示窗口函数,一般定义为

I表示图像灰度函数,省略无穷小项得

将Ex,y转化为

M为实对称矩阵:

通过对角化处理后得到

其中,R代表旋转因子,进行对角化操作后并不能改变以u,v为坐标参数的空间曲面的形状,它的特征值反应了两个主轴方向的图像表面曲率。
2.3 SURF特征点检测算法
在介绍SURF算法之前,本文需要介绍它的前身SIFT,也就是路易在两千零四年发明的尺度不变特征换算法,SIFT建立起源图像和高斯核的卷积之间的尺度空间,在金字塔形高斯差分空间中以尺度不变为标准提取特征点[8~9]。此算法具有的尺度不变性给予了处理结果的高强度抗性,使得最终结果可以在一定程度的视角差异、光强差异、位置差异下保持一致性。这种优越的性能让SIFT成为了最适用的图像特征提取技术[10~11]。数学表达式为

然后分别计算其与图像中每个特征点的邻域像素值差的平方和,即:

而本文提到的SURF特征点检测算法,就是SIFT的一种改良变体,诞生于SIFT的两年后。SURF的改良在于引进了加速鲁棒特征,使得可以简化SIFT的计算量和计算速度,使用了近似Harr小波方法来提取特征点,简化了二阶微分模板的构建,提高了尺度空间的特征检测的效率。SURF算法在积分图像上使用了盒子滤波器对二阶微分模板进行了简化,从而构建了Hessian矩阵元素值,进而缩短了特征提取的时间,提高了效率[12~14]。
3 图像拼接的实现及验证
3.1 图像拼接的实现
3.1.1 图像拼接总体框架
图像拼接是一个复杂的多步处理流程,每一步的精度和效果都会直接干涉最终成像的完成度,本文探讨的图像拼接技术的大致流程如图2所示。
3.1.2 图像拼接系统的实现
前文已经提提到了图像拼接技术的处理中需要用到大量的数值计算、矩阵处理[15],所以最好的软件选择就是美国Mathworks公司开发的Matlab平台,该平台不仅针对科学计算功能进行的大量的优化和功能封装,还具有大量的扩展包可以扩展外围功能,所以极为适合做本文的图像处理工作,Matlab本身也有针对计算机视觉方向的工具包可以使用。而本文就是利用Matlab进行一个简易的图片拼接软件的开发。本文希望在保证极强用户交互性的前提下,能够使得用户便捷的输入自己要处理的图片,然后将图像进行上述流程的处理,最终输出用户想要的结果。

图2 图像拼接总体框架
以下本文简述本系统的技术实现流程:1)用户启动系统后会进入系统的主界面,主界面给予用户端口提交自己要处理的图片,本文设置两个按钮Load Image1、Load Image2,按下之后就可以载入相应的图片;2)用户在载入图片后就开始进行相应的处理流程——特征提取、特征匹配、匹配对提纯、拼接和融合,本文设置不同的按钮,按下相应按钮就可以进行相应的处理;3)处理流程正常结束后,本文可以就得到了本文的最终结果,通过设置好的save按钮来保存本文的结果到本文想要的位置;4)点击exit按钮就可以成功退出系统。
3.2 图像拼接的验证
本文用几组样本数据演验证Harris算法、SIFT算法与SURF算法的有效性,并对三种算法得出的特征点和特征匹配对进行对比。本文使用的是索尼数码照相机,具有1200万像素,成像规格是640x480。本文运行程序使用的计算机配置为1GB RAM,CPU主频2.5GHz,四核四线程,操作系统为Windows7。详细测试数据可由表1所示。
从表中观察可以看到,提取到的特征点个数从小到大依次是Harris算法、SURF算法、SIFT算法,提取特征点的速度从小到大依次是Harris算法、SIFT算法与SURF算法。所以一般来讲Harris算法虽然处理的时间只比SURF慢了0.3s,但是提取到的特征点太少,进行图像匹配的话,构造的模型精度很值得怀疑。但是表格的数据只是量化计数,如果本文观察三种算法提取出的特征点坐标的话,会发现虽然SIFT算法得到了大量的特征点,但是这些特征点的分布杂乱无章,大部分特征点严格来说都是判断失误得出的,并无实际作用,反而会影响最终的匹配准确性。
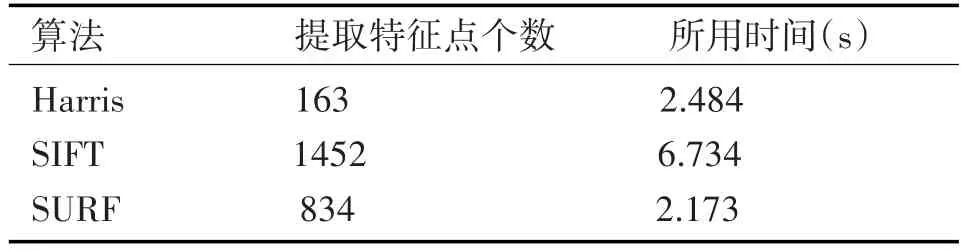
表1 三种特征点提取算法比较结果
在该系统中,用户可以观察到一定范围的真实情况,从而获取到自己需要的信息。下面通过一组实例来说明图像拼接技术的应用,如图3~5所示。

图3 测试图A

图4 测试图B

图5 拼接结果
图3和图4是拍摄到的某一场景图像,图5是采用本文图像拼接方法得到的拼接图,从效果来看,实现了无缝拼接。
总的来说,无论是进行特征点的提取,还是进行特征点的匹配,SURF算法的精确度和速度都遥遥领先于SIFT算法。
4 结语
图像处理领域里图像拼接技术是应用广泛,受众庞大的高需求热门研究方向,并且随着此种技术逐渐进入人们的视野并被大众广泛接受。图像拼接技术追求的效率也在不断的向前进步,人们不断希望自己使用的处理软件能够更快、更准确和更简单的完成自己期望的任务。本文提出了基于SURF特征点的图像拼接技术研究。利用基于特征点的配准方法作为本文采用的配准方法。并利用SURF算法设计了本文图像拼接方法的总体设计,然后对本文图像拼接算法的实现进行了描述。最后,本文搭建了实验平台,设计了仿真实验,通过仿真实验分析,表明了本文所设计的图像拼接方法不仅具有良好的图像拼接效果,而且该方法在进行图像拼接时还具有较高的拼接效率,为图像拼接技术的进一步研究提供了有效的参考。
[1]刘靖.实时列车图像拼接和信息分析系统[J].自动化与仪器仪表,2016,2(165):165-167.
[2]杨云涛,冯莹,曹毓.基于SURF的序列图像快速拼接方法[J].计算机技术与发展,2011,21(3):6-9.
[3]张锐娟,张建奇,杨翠.基于SURF的图像配准方法研究[J].红外与激光工程,2009,38(1):160-165.
[4]贺元香,史宝明,李恒杰.一种改进的抗几何攻击彩色图像水印算法[J].自动化与仪器仪表,2014,1(1):102-105.
[5]邱建国,张建国,李凯.基于harris与sift的图像匹配方法[J].测量技术学报,2009,23(3):271-274.
[6]李云霞,曾毅,钟瑞艳.基于SIFT特征匹配的图像拼接算法[J].计算机技术与发展,2009,1(19):43-46.
[7]罗三定,贺俊耀.基于SURF和KLT跟踪的图像拼接算法[J].计算机工程,2010,1(36):215-217.
[8]史露,苏刚,韩飞.基于SIFT和SURF图像拼接算法的改进算法[J].计算机应用与软件,2013,6(30):72-74+78.
[9]高超,张鑫,王云丽.一种基于SIFT特征的航拍图像序列自动拼接方法[J].计算机应用,2007,11(27):2789-2792.
[10]王玉亮,沈建新,廖文和.基于SIFT特征的眼底图像自动拼接[J].中国图象图形学报,2011,4(16):654-659.
[11]曹楠,王萍.基于SIFT特征匹配的图像无缝拼接算法[J].计算机与应用化学,2011,2(28):242-244.
[12]高盛丰,王正勇,藏媛媛.基于颜色不变量和SURF的彩色图像拼接[J].计算机工程与应用,2013,49(12):113-115.
[13]朱奇光,王佳,张朋珍.基于高斯矩改进SURF算法的移动机器人定位研究[J].仪器仪表学报,2015,11(36):2451-2457.
[14]詹曙,王少武,蒋建国.基于尺度限制SURF的图像配准[J].电子测量与仪器学报,2013,10(27):963-967.
[15]袁翰祖.医学图像拼接中特征点检测算法研究实现[J].计算机工程与应用,2013(7):103-104.
