基于改进PSO算法的横动伺服控制系统PID参数优化
2018-04-26谢天驰
曹 薇,谢天驰
(1.广东水利电力职业技术学院,广州 510925;2.海南大学,海口 570228)
0 引 言
横动伺服控制系统主要由横动伺服电机、控制驱动器及嵌入式控制器等组成,该系统功能上属于位置输入-输出系统,结构复杂,不满叠加原理,难以直接求解,通常把系统当作黑像模型进行辨识求解[1-2]。横动伺服系统位置控制器采用的是简单、灵活、易调的PID控制器,PID控制器[3-5]的比例系数Kp、积分Ki、微分Kd三个参数决定了控制器的可靠性和鲁棒性。Kp越大,控制作用越强,调节时间越短,但是过大容易引起振荡;Ki越大,系统超调量越小;Kd越大,振荡越小,系统越稳定。横动伺服系统是复杂的高阶非线性系统,具有时变不确定性,传统的PID参数整定方法很难达到预期的效果,需要利用人工智能算法来进行参数优化[6-7]。
在本文前期的研究工作中,已经将横动伺服系统进行了辨识,得到了其五阶传递函数[8]。本文将就其位置控制器的PID参数优化问题,设计了基于改进粒子群算法的优化方法。首先,对标准粒子群算法进行惯性权值,采用类似“选择”的思想,平衡了算法的全局搜索能力和局部搜索能力,避免算法陷入局部最优;其次,利用传统的Z-N法进行整定,然后将该整定结果作为粒子群算法(以下简称PSO)和改进粒子群算法优化的初始设置值,最后将各算法优化前后的参数值进行阶跃响应分析,响应结果表明了改进粒子群算法的有效性,并提供了一种控制系统PID参数优化的通用解决方法。
1 横动伺服控制系统数学模型
横动伺服控制系统主要由位置控制器、速度控制器、电流控制器、伺服电机和执行机构等组成,结构如图1所示,在该系统中,位置控制器选用的是迈克比恩L7N伺服驱动器,为PD控制器。系统从内而外分为3环,由内而外分别为:电流环、速度环和位置环。最外环为位置环,通过执行机构反馈位置信号和输入位置信号形成闭环控制,位置控制器将位置环差分信号作为速度环的输入;中间环为速度环,通过电机轴转速信号和输入速度信号形成闭环控制,速度控制器PI控制器将速度环差分信号作为电流环的输入;最内环为电流环,通过伺服电机的电流信号与输入电流信号形成闭环控制,控制目标为电机输出扭矩。

图1横动伺服控制系统结构图
图1的横动伺服控制系统传递函数:
(1)
式中:A=0.001s5+0.369 5s4+19.785 0s3+18.414 8s2+15.296 0s。本文将利用改进粒子群算法对系统位置控制器的比例系数Kp和微分系数Kd这两个参数进行优化,寻找一组最优参数,使得系统响应快、超调小、稳定时间短及鲁棒性强等特点。PID控制器优化结构如图2所示。

图2系统位置PID控制器结构
位置PID控制器表达式:
选用ITEA作为误差性能指标来反映系统的调节品质。表达式如下:

(3)
式中:e(t)为系统实际输出与输入的差值。
2 改进粒子群算法的PID参数优化策略
2.1 标准粒子群算法
粒子群算法主要是在设置的搜索空间内,依靠速度更新公式和位置更新公式来更新飞行轨迹和位置,所有粒子通过迭代寻找最优目标,最终在最优目标处收敛。
速度更新公式:

2.2 改进粒子群算法
在粒子群算法中,粒子搜索能力既要“广”又要“精”,那么“广”就是全局搜索能力,“精”就是局部搜索能力,“广”和“精”是一对矛盾,这对矛盾便依靠惯性权值的大小来平衡。比如,惯性权值越大,全局搜索能力越强,局部搜索能力越弱,能有效提高算法的收敛速度;反之,惯性权值越小,全局搜索能力越弱,局部搜索能力越强,能有效提高算法的收敛精度。所以,本文针对标准粒子群算法做出两个改进:(1)前期提高惯性权值扩大搜索空间,提高算法的全局搜索能力,避免陷入局部最优;(2)后期减小惯性权值,在最优解附近局部搜索,提高搜索精度,表达式如下:
×k,(k=1,2,…,kmax)
(6)
式中:w为算法惯性权重。
2.3 PID参数优化原理
利用改进粒子群算法对PID控制器的参数优化过程如图3所示。
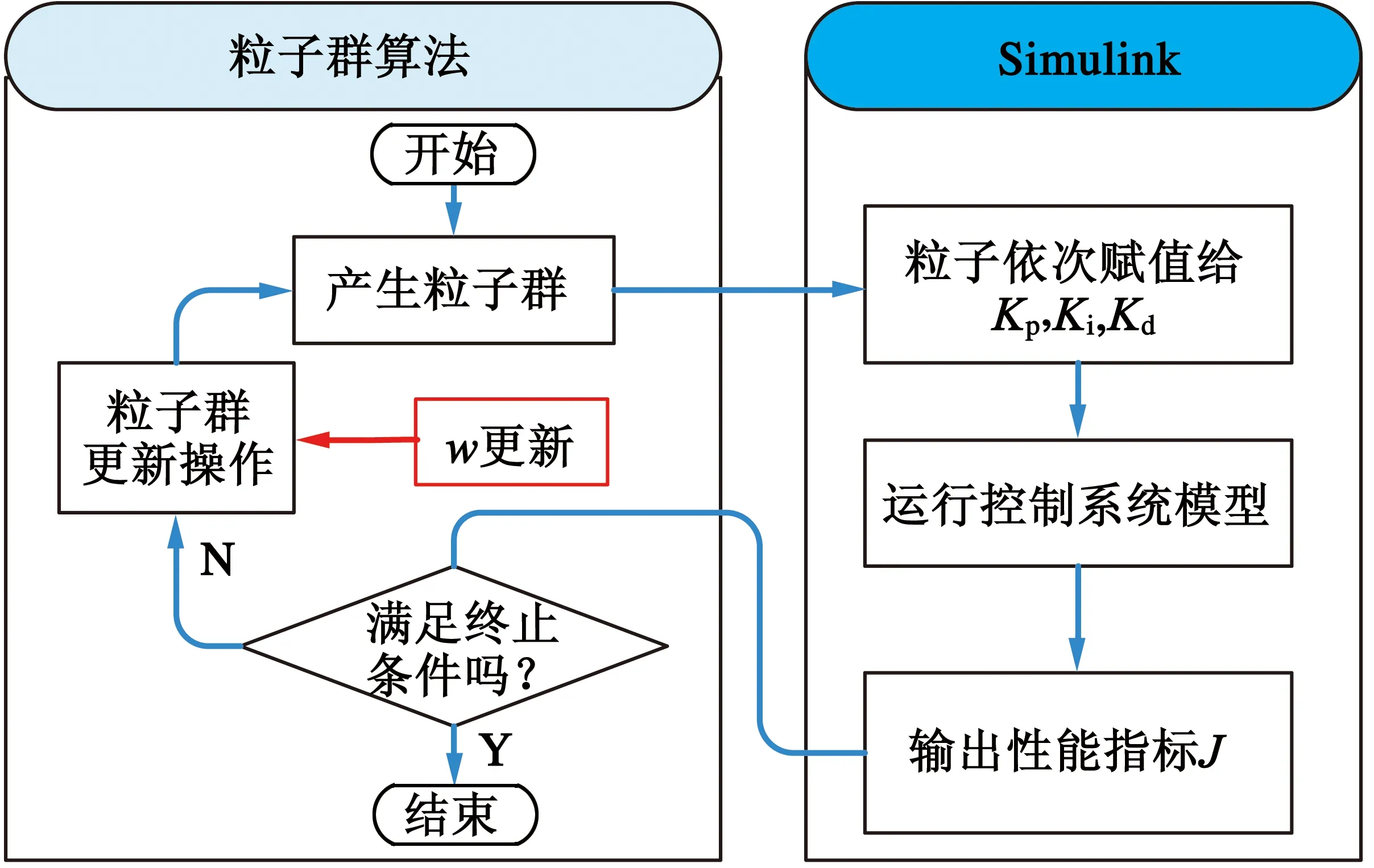
图3PID参数优化原理图
算法开始时,初始化粒子种群,将种群中的粒子依次赋值给PID控制器参数Kp,Ki,Kd;然后运行Simulink模型,得到该组对应的性能指标,看是否满足终止条件,如果满足,则算法结束,如果不满足,则算法继续更新粒子寻优直到满足终止条件。
3 优化结果及响应分析
本文将运用传统的Z-N法、标准粒子群算法及改进粒子群算法3种方法求取控制器的Kp,Kd值,先利用传统Z-N法整定,整定的结果一方面作为粒子群算法参数寻优的初始值,另一方面作为与优化后的结果的对比值。
3.1 Z-N法整定
横动伺服控制系统的传递函数式(1)的根轨迹如图4所示。然后从根轨迹图中选择任意一个穿越jw轴上的点,便可求得其临界增益Km=292.785 3,此点对应的坐标为穿越频率fm=139.455 2。

图4传递函数的根轨迹图
根据Z-N法的整定规则,如表1所示,可得:
表1Z-N法整定规则

控制器类型控制器参数KpKiKdP0.5KuPD0.8KuKp∗0.12TuPI0.45KuKp0.85TuPID0.6KuKp0.5TuKp∗0.12Tu
3.2 改进粒子群算法PID参数优化
改进粒子群算法初始设置如表2所示,以Z-N法整定的Kp=234.228 2,Kd=1.266 3作为优化的初始参数。算法收敛曲线如图5所示,参数Kp,Kd的变化曲线如图6所示。
表2参数设置(以下参数均为常数,无量纲)

名称参数设置值名称参数设置值比例系数Kp234.2282最小权值wmin0.2微分Kd1.2663最大权值wmax0.8S100c11.5G100c21.9V[-1,1]D1

图5算法收敛曲线

图6优化过程参数变化图
标准粒子群(w=0.5)在10代、20代左右均出现了陷入局部最优的趋势,最终50代左右开始收敛;而改进粒子群算法在20代左右便快速收敛,证明了改进粒子群算法在寻优过程中,收敛速度更快。优化结果如表3所示。
表3优化结果

参数算法Z-N法标准PSO改进PSOKp234.2282113.6352107.3766Kd1.26631.20560.7624
3.3 系统响应分析
为了检验优化结果的有效性、优越性及其系统的动态性能,输入阶跃信号,将表3的结果进行动态性能响应分析,响应结果如图7所示。

图7改进粒子群算法优化后的系统阶跃响应曲线
由仿真结果可知,采用Z-N法整定结果得到响应出现明显超调,调节时间约为150 ms。采用粒子群算法进行PID控制器参数寻优得到的控制效果明显改善,系统响应快,只有二次振荡,大约在100 ms即达到了稳定状态。而采用改进粒子群算法做最终优化的参数,其相应无超调,大约在50 ms便达到稳定状态。因此利用该改进粒子群算法优化的方法能够保证控制的快、准、稳,且简单易行,进一步提高了横动伺服系统的控制性能。
4 结 语
针对横动伺服控制系统的位置控制器PID参数优化问题,本文结合改进粒子群算法成功实现了参数的优化,可得出如下结论:
1)改进了标准粒子群算法,对惯性权值采用了类似“选择”的思想,平衡了算法的全局搜索能力和局部搜索能力,避免算法陷入局部最优,算法简单有效。
2)将改进的粒子群算法应用于横动伺服控制系统的PID参数优化,系统动态响应较Z-N法及标准粒子群算法性能更好,响应速度更快,无超调,调节时间更短。
3)提供了一种控制系统PID参数优化的通用解决方法:世界上几乎所有的控制都是非线性的,特别对于高阶非线性系统由于其传递函数复杂,难以直接求取。若其传递函数未知,可先通过系统辨识求出其传递函数;在已知传递函数的基础上,利用Z-N法结合传递函数根轨迹图进行参数整定,整定后的系统响应如果满足要求,则无需进行优化;如不满足需求,则进一步利用智能算法进行优化,可利用Z-N法整定结果作为算法优化初始值,来提高优化精度和优化效率。
[1] 丁锋.系统辨识--辨识方法性能分析[M].北京:科学出版社,2014.
[2] 丁锋.系统辨识新论[M]. 北京:科学出版社,2013.
[3] 王伟,张晶涛.PID参数先进整定方法综述[J].自动化学报,2000,26(3):347-355.
[4] 吴宏鑫,沈少萍.PID控制的应用与理论依据[J].控制工程,2003,10(1):37-42.
[5] 应明峰,鞠全勇,高峰,等.基于粒子群优化的PID控制器设计与应用[J].计算机仿真,2011,28(11):283-287.
[6] 纪震,廖惠连,吴青华.粒子群算法及应用[M].北京:科学出版社,2009.
[7] 陈明,刘衍民.基于自适应排斥因子的改进粒子群算法[J].计算机应用,2013,33(8):2269-2272.
[8] 谢天驰,曹薇.基于MPSO算法的横动伺服控制系统黑箱模型辨识[J].现代纺织技术,2017,25(3):63-68.