复杂环境下基于视觉显著性特征的铁轨识别方法
2018-04-26宋亚帆潘迪夫韩锟
宋亚帆,潘迪夫,韩锟
(中南大学 交通运输工程学院,湖南 长沙 410075)
在危害我国铁路行车安全的众多因素中,异物侵限是其中较为常见且危害较大的一个重要方面。在铁路沿线造成异物侵限事故多为隧道坍塌、积沙、落石、路基塌陷等自然因素,而在平交道口则多为行人、动物及车辆的入侵造成安全隐患,这些事故的发生均有强烈的随机性,采用铁丝网、人为监控的方法效率低且效果较差。目前,世界各国普遍采用的措施是利用视频监控技术,在线路重点监测区间和平交道口对异物入侵行为进行自动的分析、判断和预警。其中,识别铁轨边缘,进而划定安全预警区域是异物侵限预警的基础。在复杂环境背景下的铁轨边缘识别中,要求检测方法对于实际环境变化有较好的适应性,同时对多铁轨、噪声污染的场景也能起到良好的识别效果。目前相关研究采用的基本方法主要有基于经典的微分边缘检测方法[1]和基于数学形态学的边缘检测方法[2]。前者基于灰度特征的检测方法对于采集图片的光照条件要求较大,当铁轨边缘与环境灰度变化不明显时,检测效果较差。后者可检测场景较为简单,无法应用图片出现多条铁轨或产生遮挡、光照变化等复杂环境。李丹丹等[3−5]提出的改进 Canny算子检测效果良好,但同样基于铁轨和背景在灰度特性的显著差异,对光照变化适应性较差,而且测试样本仅为长直铁轨。关鹏等[6]提出的线性检测模板,对于铁轨边缘的线性特征提取效果较好,但同时引入较多环境干扰的线性特征。史红亮等[7]提出了一种基于相位一致性的铁轨特征提取方法,对于光照的变化具有不变性,但针对复杂场景的铁轨检测效果较差。以上方法都无法很好满足复杂环境干扰、多铁轨识别的要求。考虑到铁轨在复杂环境中仍具有人类视觉的“显著性特征”,本文针对复杂环境下铁轨边缘检测的场景,提出一种基于显著性特征的检测方法。首先进行视觉机制建模,基于多尺度Gabor算子,对铁轨边缘信息进行检测,融合环境抑制算子,实现环境干扰信息的初步过滤。根据铁轨图片的“显著性特征”,提出一种铁轨图片显著性的评价模型,在建模过程中利用主成分分析法(PCA)思想及几何原理对显著性指标进行量化处理,实现图片特征的2次提取,消除环境干扰信息和非铁轨特征,得到较为理想的铁轨边缘。基于统计学方法,提出一种简便有效的铁轨边缘增强算法,对铁轨片段进行断线重连和增强。本文的方法可以实现铁轨边缘特征的提取增强、复杂环境干扰因素的抑制滤除。同时,该方法对于光照变化、图片噪声具有较好的抗干扰能力。
1 复杂环境铁轨图片特征分析
1.1 复杂环境下铁轨特征检测
图1为实地采集的灰度测试图片(1 200×900),地点位于某机务段京广主干线。根据图 1,可以看出复杂环境下铁轨边缘检测存在以下问题:
1) 铁轨存在遮挡情况。
2) 铁轨检测区域较多,且部分区域光照不均匀或边缘对比度不强烈。
3) 环境中存在较多线性干扰特征。

图1 实地采集铁轨测试图片Fig. 1 Track test picture shot in main railway lines
利用传统的图像分割算法或线性模板,虽然可以很好的保留图片边缘特征,但同时也会将大量图片噪声和干扰信息加以保留,这会极大增加铁轨提取的难度。
1.2 铁轨边缘特征显著性分析
对于人眼而言,复杂环境中的铁轨边缘仍具有较好的视觉显著性,考虑到人眼视觉特性,本文认为铁轨具有以下显著性边缘特征:
1) 图片中铁轨边缘与两侧存在灰度差异,且铁轨灰度分布较为均匀。
2) 铁轨边缘具有较好的连续性,并且因为图片采集视角的普遍特性,铁轨与环境相比存在角度差异和形状差异。
3) 相比于环境中的杂乱干扰因素,铁轨具有较稀疏边缘密度[8]。
1.3 铁轨提取算法的基本思想和基本流程
根据上文分析,对铁轨边缘进行提取的重点在于通过良好的边缘检测方法,保留铁轨图片边缘特征的同时尽可能抑制与铁轨相连的干扰信息,然后基于铁轨显著性特点的消除干扰信息,并对因干扰断裂的铁轨片段进行连接增强。因此,本文提出方法的基本流程为:输入图像;图像预处理;基于视觉机制的铁轨边缘检测模型(HSV Model);基于铁轨显著性特征的环境干扰消除模型;基于统计学方法的铁轨边缘增强算法;获得铁轨边缘特征。
2 复杂环境铁轨特征提取算法设计
2.1 图像预处理
为均匀图像的全局光照、增强图像边缘灰度特征,从而提高铁轨边缘检测准确性,本文对测试图片进行预处理。首先通过直方图均衡化,增强图片的对比度。然后采用最大类间方差法(Ostu)进行阈值分割,增强铁轨的特征。
2.2 基于视觉机制铁轨边缘检测建模
2.2.1 多尺度Gabor检测算子
在图像处理中,人眼的视觉机制[9]对于边缘轮廓高层特征具有快速提取能力,可以高效的将目标边缘聚合成连续的目标边界或者轮廓,同时抑制环境中纹理边缘和噪声。经过生物学研究,二维Gabor函数可以很好的描述人眼视觉皮层简单细胞感受野的分布[10],从而有效的模拟人眼视觉机制,增强图像边缘等细节特征。因此,本文以Gabor算子为基础,检测图像中铁轨边缘线条的特征。
二维Gabor函数是一个高斯函数调制的复正弦函数,可以同时获得较高的时域和频域分辨率,其函数形式表示如下:

式中:参数f表示Gabor函数的中心频率;参数θ表示 Gabor函数方位,参数 σx和 σy分别表示沿 x轴和y轴的高斯包络函数的空间常量。利用Gabor算子对于输入图像I(x,y)提取边缘特征,经过卷积后图像可以表示如下:

二维Gabor算子对图像光照变化不敏感,同时对噪声的鲁棒性较强。不同的中心频率f对应算子不同尺度,其中大尺度的Gabor算子对于噪声的适应性强,而小尺度算子可以检测出更精细的纹理特征,这对于测试图片中远处的铁轨边缘检测有着重要的影响。为了保证铁轨边缘细节检测的准确性,同时提高算法对环境变化的鲁棒性,本文选择4个尺度、4个方向下Gabor算子来进行检测,计算不同尺度下每个像素点梯度幅值,选取最大的结果作为该像素点的梯度幅值。梯度幅值的表达式如下:

2.2.2 环境抑制算子
在人眼的视觉机制中,V1区神经元对感受野中的刺激响应收到视觉环境的抑制,当视觉中环境的刺激与神经元最优响应刺激的方向一致时[11],抑制效果最强;随着方向差别增大,抑制效果将弱化;当2个方向正交时,环境抑制效果最弱。为实现人眼机制的抑制作用,在环境抑制算子建模中,首先通过高斯差分函数(DoG)实现环境抑制效果的距离加权[12],表达式如下:其中:距离抑制计算的效果由权重函数决定,表达式如下:式中:函数P(z)保证距离抑制计算仅发生在抑制区域内,P( z)1表示采用L1范数。则环境抑制算子通过加权函数与梯度幅值的卷积计算得到,表示为:

则经过多尺度Gabor算子和环境抑制作用后的边缘检测算子如下:

式中:函数P(z)定义如式(6)所示,参数α为控制因子,决定对二维Gabor算子计算幅值的抑制强度。对计算后的图像边缘进行非极大值抑制和滞后阈值法细化,获得铁轨边缘检测图像。
2.3 环境干扰信息消除模型
为将复杂环境下的干扰信息和杂乱边缘进行滤除,本文根据1.2节的分析,在获得铁轨图像边缘信息的基础上,提出以下铁轨图片的显著性[13]评价特征:1)长度特征;2)角度特征;3)形状特征。
1) 长度特征
铁轨边缘为长且连续的线,一致性较好,而经过环境抑制算子之后的干扰信息,多为短小片段,通过长度特征可以消除大部分干扰的细小片段。该评价指标的实现通过连通域像素的个数来表征长度特征,首先利用种子算法[14]获得图片 E0(x, y)所有的连通域 Co( i, j),通过统计每个连通域的像素点数目 Tk( i, j),设定合理阈值 Th剔除像素点少的连通域,获得满足长度特征的图片信息 Cl( i, j)。

式中:Cd(i, j)表示剔除的连通域;H表示像素点低于阈值的连通域的集合。
2) 角度特征
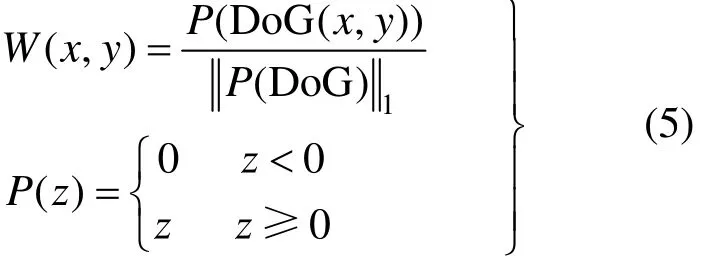
在测试图片中,复杂的环境里具有大量的干扰线性特征,这些特征的长度特性与铁轨较为相似,但根据分析,其角度特征与铁轨边缘相比,具有较大差异,不符合铁轨的角度显著性。根据主成分分析法[15],旋转得到新的相互正交的坐标轴为数据点方差最大的方向,可以用来表征数据分布的主要情况。为获取连通域方向的表征,通过计算得到连通域的二阶中心矩来估计其方差,通过二阶中心矩建立一个拟合的椭圆。当线段曲率不大接近直线时,则椭圆的长轴可代表线段的方向,其与x轴的夹角α(|α|<90°)即可用来反应线段的角度特征,如图 2(a)所示。当线段曲率较大,无法用夹角来表征,此时利用拟合椭圆的离心率e作为角度特征的补充,定义离心率为 e = ( a - b ) /(a + b ),当线段趋近直线时,离心率接近1,如图2(b)所示。
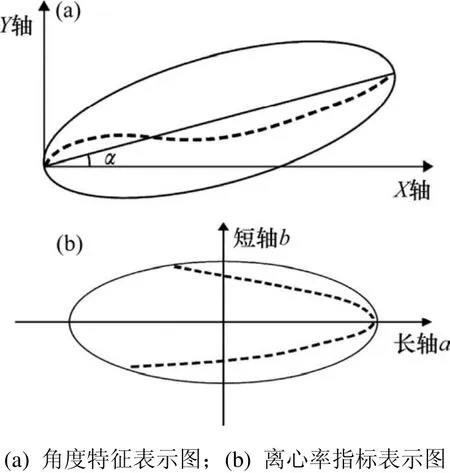
图2 角度特征量化处理示意图Fig. 2 Schematic diagrams of angle features quantization
3) 形状特征
一些干扰特征较短且成团状,对于包含此类干扰特征的连通域,建立形状特征c的评价指标。定义形状特征为连通域的周长与面积的比值,当比值越大,则越接近团状目标。
综合铁轨图片显著性评价指标,则环境干扰信息消除算法流程如下:
Step 1 利用种子算法遍历图片,获得所有的连通域,统计连通域所有像素点的个数,设定阈值(Th=50),剔除连接像素小于Th的连通域。
Step 2 通过相同二阶中心距的椭圆来拟合连通域,计算椭圆长轴与x轴方向的夹角,设定阈值(|αh|<2°and 90°−|αh|<10°),剔除角度满足角度特征阈值的连通域。
Step 3 计算拟合椭圆的离心率,设定阈值(eh=0.9),剔除离心率大于阈值的连通域。
Step 4 计算连通域周长面积比,设定阈值(ch=1.1),剔除小于阈值的连通域。将剩余的图片信息保留,得到经过消除复杂环境干扰信息后的结果。
2.4 铁轨边缘特征增强模型
由于环境中干扰信息可能会与铁轨片段相连接,其连通域在消除干扰信息过程中被消除,因此需要对铁轨断开的片段进行连接增强。对于图像中任意2条直线段,如果它们属于一条直线,则2条线段上任意2点的连线与水平坐标轴的夹角相等。本文基于此假设,利用根据统计学方法,对图片中2条线段上任意2点的连线形成的角度进行统计,如果这2条线段可以相连,则统计结果满足脉冲分布,脉冲值对应的就是点连线的角度。但在实际情况中,角度值不会完全相等,因此统计结果会接近极窄的高斯分布。如果2条线段不能相连,则点连线的角度会在一个大的范围内变化。通过计算角度分布的标准差,可以很好的区分这2种情况,结果如图3所示。
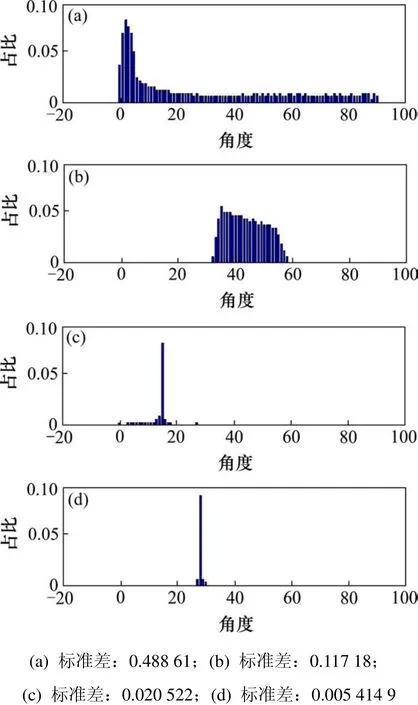
图3 线段点连线的角度分布及标准差计算结果Fig. 3 Results of angular distribution and standard deviation in line segment
从结果中可以看出,当标准差较大时,对应的分布角度跨度很大,则2条线段不能重连的。标准差逐渐变小,分布越来越趋向高窄的高斯分布,最后甚至非常接近脉冲分布,意味着这2条线段满足可重连的依据。
基于以上分析,铁轨边缘特征增强模型流程如下:
Step 1 构造线段连通域的空间表示,选取空间域中任意2条线段。
Step 2 对于角度差异过大(设定阈值为5度)的线段组合,直接跳过算法流程。
Step 3 统计线段组合中任意2点连线的角度分布,进行标准差计算,设定标准差阈值为 0.005。满足阈值要求的线段组合进行连接增强。
Step 4 重复step1,直至遍历所有线段组合。
3 试验结果分析
3.1 本文方法试验结果
在图像预处理得到图4(a)之后,本文通过基于视觉机制的边缘检测建模方法,选取4个尺度,波长分别为 0,1,2和4,4个采样方向,采样角度分别为(0,π/4,2π/4和 3π/4),构建多尺度 Gabor算子。经过环境抑制算子计算之后可以得到如图4(b)所示的边缘检测结果。从检测结果可以看出,通过环境抑制算子,可以很好的抑制环境中部分干扰信息,并较为完整的保留铁轨的边缘特征。同时,根据环境干扰信息消除算法,对复杂环境干扰信息进行顺序滤除,得到如图4(c)的消除结果。在此基础上,设定铁轨边缘增强模型的标准差阈值为0.005,对铁轨断裂线段进行连接增强,获得最终结果,如图4(d)所示。
3.2 与其他检测方法对比试验结果
对于复杂环境下的铁轨检测,本文选取了常用的 Canny算子以及其他比较有代表性的 LLPD算子、基于数学形态的检测方法和基于相位一致性的检测方法,通过对测试图片的检测,得出实现结果如图5所示。
从不同方法的检测结果可以发现,经典的Canny算子和基于相位一致性的方法,可以有效地提取图片的边缘信息,铁轨的边缘特征尤其是近处特征得到了较好的保留。但Canny算子由于对边缘的敏感性,保留了很多干扰信息,而远处的干扰信息已经和铁轨特征相连接重合。基于相位一致性的方法同样保留了图片完整的边缘信息,这增加了后续复杂环境干扰信息滤除的难度。LLPD算子利用模板只提取图片的中线性边缘,可以提取出图片中较为完整的线性特征,但图片中仍存在噪声与铁轨连成片段的情况,相应文献[6]的实验结果中也保留了与铁轨边缘相似的线性特征未加消除。基于数学形态学的检测方法只能识别出灰度对比明显的近处铁轨,准确性较差。与上述方法相比,本文边缘检测方法可以很好的保留铁轨边缘特征信息,同时通过环境抑制算子将干扰信息进行抑制并使其与铁轨边缘分开,便于之后铁轨的识别提取。因此,本文方法对复杂场景铁轨识别具有更好的适用性。
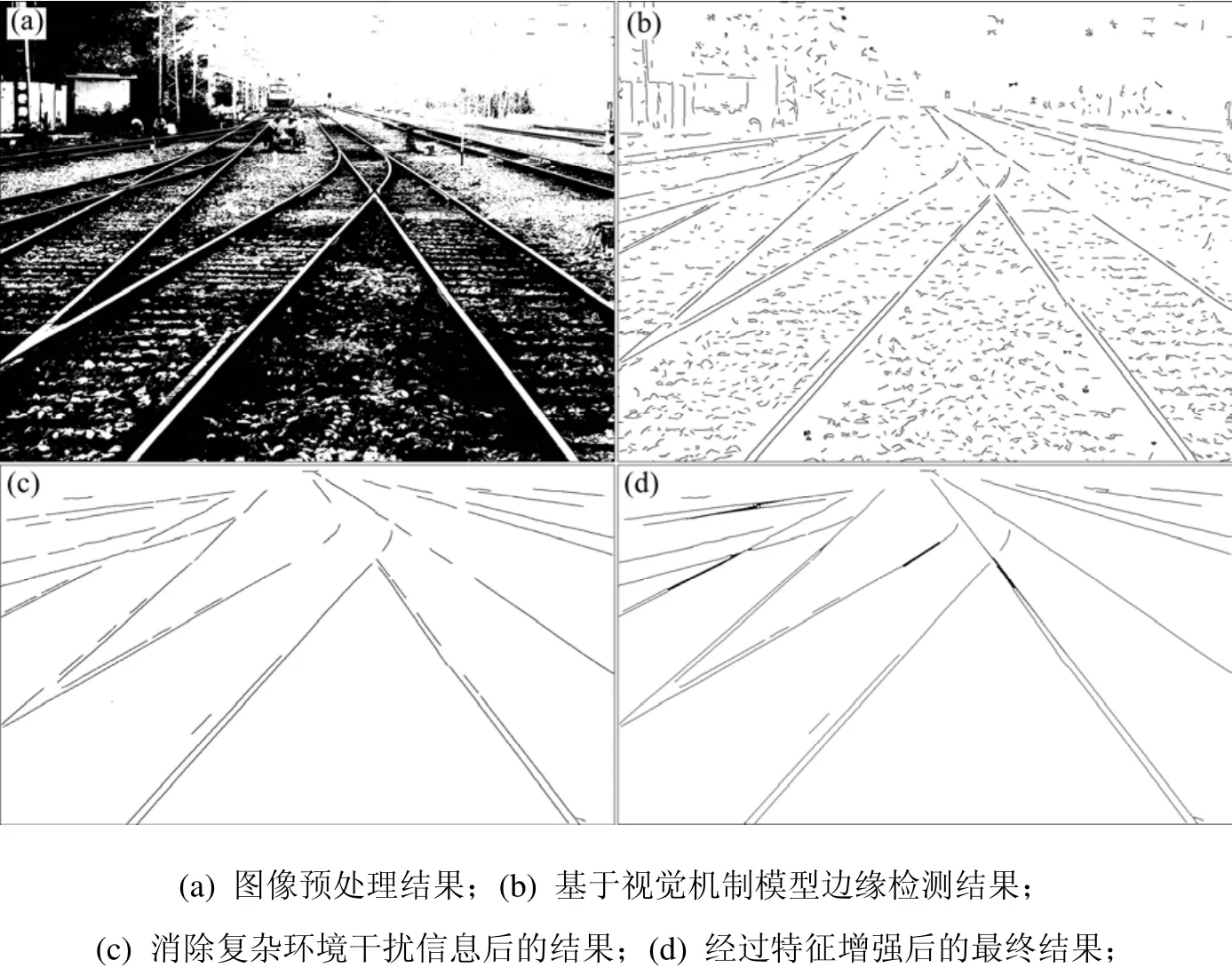
图4 复杂环境铁轨检测方法试验结果Fig. 4 Results based on track detection method in complex test
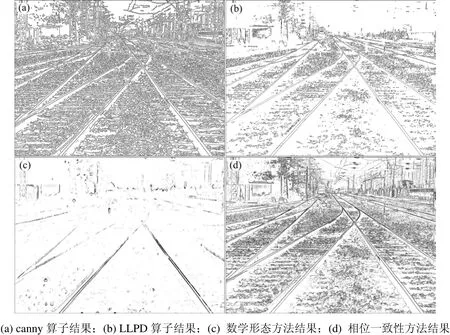
图5 其他检测方法输出结果Fig. 5 Results based on other methods
3.3 本文方法对环境变化适应性
本文针对实际场景中的特殊情况,如光照条件极端(极亮或极暗),以及图片存在噪声干扰,选取光照极亮、极暗,添加方差为0.02的高斯噪声、噪声密度为0.05的椒盐噪声4种情况进行试验,得到如图6所示的结果。与正常情况下相比,对某些区域的检测存在偏差,但同样能获得较为满意的结果。
3.4 本文方法对其他场景适应性
因为Gabor算子对纹理特征的敏感性,融合环境抑制算子的加权距离抑制作用,本文的边缘检测方法可以很好的应用于显著性目标轮廓检测场景。而环境干扰特征消除模型,可以对图片起到很好的过滤作用,保留如铁轨长而连续的边缘特征。本文选取公路标识轮廓检测场景,测试基于视觉机制边缘检测方法的环境抑制作用,同时通过公路提取场景检验环境干扰信息消除模型的效果,结果如图 7和图8所示。试验表明本文方法对于提取显著性边缘特征、抑制环境干扰的场景具有良好的适用性,同时可以有效消除图像中非长直边缘特征的干扰信息。
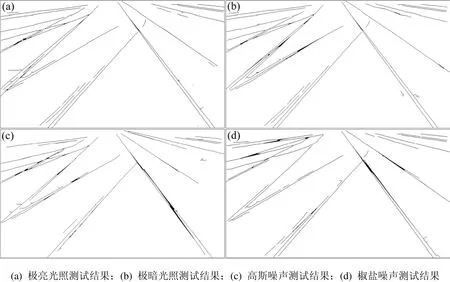
图6 环境适应性试验结果Fig. 6 Results of environmental adaptability test

图7 公路标识轮廓检测试验结果Fig. 7 Results of road signs detection test

图8 公路提取试验结果Fig. 8 Results of road detection test
4 结论
1) 基于视觉机制的边缘检测模型,通过环境抑制算子,可以滤除大量复杂环境的干扰特征,同时保留较为完整的铁轨边缘信息。
2) 提出的铁轨显著性评价模型及特征增强算法,通过融合数学统计方法,量化指标的同时可以简便有效的消除环境中的边缘干扰信息,保留并增强铁轨边缘特征。
3) 本文建立的边缘检测方法,基于Gabor算子的光照不敏感性以及环境抑制算子的滤除作用,对环境的变化、尤其是光照和噪声的改变,有着较好的鲁棒性。同时,可以应用于公路标识的轮廓检测、公路提取等其他场景。
参考文献:
[1] 柴世红. 基于边缘检测的铁轨识别[J]. 铁路计算机应用, 2009, 18(4): 1−3.CHAI Shihong. Railway recognition based on edge detection[J]. Railway Computer Application, 2009, 18(4):1−3.
[2] 张霞, 党建武, 马宏锋. 基于双结构元素数学形态学的铁轨图像边缘检测方法[J]. 铁路计算机应用, 2011,20(5): 28−31.ZHANG Xia, DANG Jianwu, MA Hongfeng. Edge detection method of track images based on mathematical morphology of dual structural elements[J]. Railway Computer Application, 2011, 20(5): 28−31.
[3] 李丹丹, 侯涛, 魏世鹏. 基于改进Canny算子的铁轨边缘检测方法[J]. 电视技术, 2015, 39(8): 55−58.LI Dandan, HOU Tao, WEI Shipeng. Image edge detection method based on improved Canny algorithm for rail[J]. Video Application & Project, 2015, 39(8): 55−58.
[4] 王燕芩, 李沛奇. 基于改进 Canny算法的铁轨边缘检测[J]. 铁道通信信号, 2015, 51(2): 75−78.WANG Yanqin, LI Peiqi. Track edge detection based on improved Canny algorithm[J]. Railway Signalling &Communication, 2015, 51(2): 75−78.
[5] 彭飞, 陈维荣, 冒波波, 等. 基于Canny边缘检测和聚合接续法的路轨边缘提取方法[J]. 铁道学报, 2012,34(2): 52−57.PENG Fei, CHEN Weirong, MAO Bobo, et al. Railframework abstraction based on Canny edge detection and poly-connection[J]. Journal of the China Railway Society, 2012, 34(2): 52−57.
[6] 关鹏, 顾晓东, 张立明. 一种基于图像处理的铁轨自动检测方法[J]. 计算机工程, 2007, 33(19): 207−209, 212.GUAN Peng, GU Xiaodong, ZHANG Liming. Automatic railroad detection approach based on image processing[J].Computer Engineering, 2007, 33(19): 207−209, 212.
[7] 史红亮, 荣剑, 周新民. 基于相位一致性的铁轨特征提取研究[J]. 自动化与仪器仪表, 2015, 35(2): 92−94.SHI Hongliang, RONG Jian, ZHOU Xinming. The research of track features detection based on phase congruency[J]. Automation & Instrumentation, 2015,35(2): 92−94.
[8] 王江涛, 李淮江, 邵芬, 等. 基于边缘密度的片状零件视觉定位方法[J]. 吉林师范大学学报(自然科学版),2016, 37(1): 81−83.WANG Jiangtao, LI Huaijiang, SHAO Fen, et al. Edge density based flaky parts visual locating[J]. Jilin Normal University Journal (Natural Science Edition), 2016, 37(1):81−83.
[9] Kim C, Milanfar P. Visual saliency in noisy images[J].Journal of Vision, 2013, 13(4): 103−104.
[10] Grigorescu C, Petkov N, Westenberg M A. Contour detection based on nonclassical receptive field inhibition[J]. IEEE Transactions on Image Processing, 2003, 12(7):729−739.
[11] Kapadia M K, Westheimer G, Gilbert C D. Spatial distribution of contextual interactions in primary visual cortex and in visual perception[J]. Journal of Neurophysiology, 2000, 84(4): 2048−2062.
[12] 桑农, 唐奇伶, 张天序. 基于初级视皮层抑制的轮廓检测方法[J]. 红外与毫米波学报, 2007, 26(1): 47−51, 60.SANG Nong, TANG Qiling, ZHANG Tianxu, et al.Contour detection based on inhibition of primary visual cortex[J]. Journal of Infrared and Millimeter Waves, 2007,26(1): 47−51, 60.
[13] 刘毅, 黄兵, 孙怀江, 等. 利用视觉显著性与图割的图像分割算法[J]. 计算机辅助设计与图形学学报, 2013,25(3): 402−409.LIU Yi, HUANG Bing, SUN Huaijiang, et al. Image segmentation based on visual saliency and graph cuts[J].Journal of Computer-Aided Design & Computer Graphics,2013, 25(3): 402−409.
[14] Gonzalez R C, Woods R E. 数字图像处理[M]. 阮秋琦,译. 北京: 电子工业出版社, 2010: 496−498.Gonzalez R C, Woods R E. Digital image processing[M].RUAN Qiuqi, Trans. Beijing: Publishing House of Electronics Industry, 2010: 496−498.
[15] Kuncheva L I, Faithfull W J. PCA feature extraction for change detection in multidimensional unlabeled data[J].IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(1): 69−80.
