基于位置先验信息配准和视觉显著性的港口舰船目标检测研究∗
2018-04-26刘思思
高 波 陈 忠 刘思思
(华中科技大学自动化学院 武汉 430074)
1 引言
港口停泊舰船不同于建筑物、机场等地面固定目标,它与地面场景不存在固定不变的空间关系,在实时图上的方向也有一定的不确定性。同时,陆地场景复杂,人造建筑会对舰船的检测造成极大干扰,直接分割不能获取全部舰船的区域信息,反而会让目标湮没在陆地疑似目标之中。因此,要检测出舰船目标,首先要确定其所在的港口结构特性,排除陆地部分的干扰,定位港口位置,提取出舰船所在的背景简单的海域,再由自身停靠规则进行分割。
港口目标有人工港口和天然港口之分,形式多样,背景复杂,目前还没有通用的港口检测方法,快速有效的港口检测识别一直是遥感图像分析中一个重要的具有挑战性的课题[1]。国际上极少有直接关于港口目标检测或识别的论文,目前国内有通过检测港口码头、检验港口岸线封闭性[2~3]、检测港口防波堤[4]三种思路来定位港口,其中检测港口码头又可分为基于直线检测定位港口[5~7]、基于轮廓差分链码检测港口[8]和基于角点检测港口[9]。第一种思路只能提取码头而无法标识出整个港口目标;第二种思路不能单独检测码头,且可能将自然地形误检为港口;第三种思路防波堤目标漏检较多。考虑到世界上港口数量有限,且港口在较长时间内不会有大的布局变化,利用这些特性,论文选择将包含全部信息的港口先验图像作为预备知识,采用图像匹配算法来定位港口与码头的具体位置。在获取到感兴趣的区域后,采用基于区域对比度的显著性方法对图像进行增强,分割出舰船块,最后利用舰船停靠的状态规则,采用横纵扫描的方法来获取每一个目标。
2 港口码头定位
大多数港口依天然海岸线而建,在可见光遥感图像中,陆地区域具有高亮度,水体部分呈暗色调,水陆对比明显。码头岸线是码头建筑物靠水体一侧的交界线,获取到它就可知道码头的大致位置区域与规模。把港口先验信息作为预备知识学习,采用SIFT特征配准,根据先验信息的结构与覆盖范围,精确定位舰船所在码头区域。
2.1 SIFT特征匹配
SIFT算子是由David G.Lowe提出的一种图像局部特征描述算子[10],即尺度不变特征变换,它通过众多的局部特性来描述图像中的目标,具有很好的优势[11],已被广泛运用于目标识别、配准、图像检索等领域。
提取特征点后,采用快速近似最近邻搜索算法(FLANN匹配子)来实现匹配点之间的高效计算,获取最小距离,这里选取3倍最小距离作为去除错误匹配的阈值,若最小距离为0,可选用暴力匹配子选取最小的前50个匹配点,以达到筛选目的。同时,利用仿射变换模型进行验证和判断匹配结果,选取3对匹配坐标,求出仿射变换参数,然后利用剩下的匹配点代入进行验证,检验结果是否配对。
其配对准确结果如图1所示。
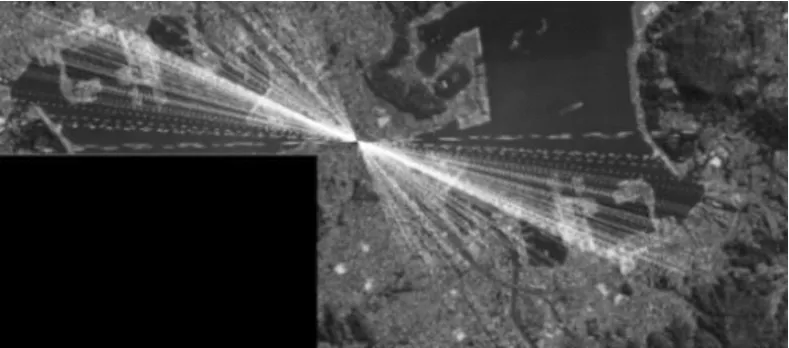
图1 匹配结果
2.2 港口目标识别策略及先验信息
此章节拟结合已有港口的先验结构信息的模板图像,通过计算原始图像与待处理图像之间的变换关系,将先验结构信息映射到目标图像上。
根据港口目标识别策略,可知港口先验信息需要两部分信息:
1)港口模板图像的内容要求包含整个港口的全貌,即覆盖了所有可能停靠舰船目标的区域。
2)从模板图上标记码头,获取指示港口内船舶目标可能停靠区域的位置信息,并进行保存。
港口中船只大都停靠在码头周围区域,其一般采用与码头平行停靠的方式依偎在码头,而码头一般是人工建筑,呈直线或类直线状态,利用这一特性可以用线段近似描述码头边缘,在码头边缘两侧,一侧为陆地,一侧为海洋,海洋区域为舰船出现区域,即ROI区域。若线段为有向线段,例如,当线段方向为顺时针方向时,其右侧即为水体区域,逆时针方向时,其左侧即为水体区域。因此,只用一条有向线段即可将整个码头信息概括表示,如图2所示。
对于三维向量 A→=(x1,y1,z1),B→=(x2,y2,z2),其向量积公式为
A→× B→=(y1z2-y2z1,x1z2-x2z1,x1y2-x2y1) (1)
分别用三维向量 a→=(ax,ay,0) 和 b→=(bx,by,0)表示方向线段a和b,结合式(1)有:a→× b→=(0,0,axby-aybx) (2)
根据向量积右手定则,叉积结果Z坐标值为正,表示a到b为逆时针方向,此时b在a的左侧;叉积结果为负,表示a到b为顺时针方向,此时b在a的右侧。
ROI区域的width参数根据码头的长度而不同,一般成正比关系。码头长表示其规模较大,可停靠较多船只。
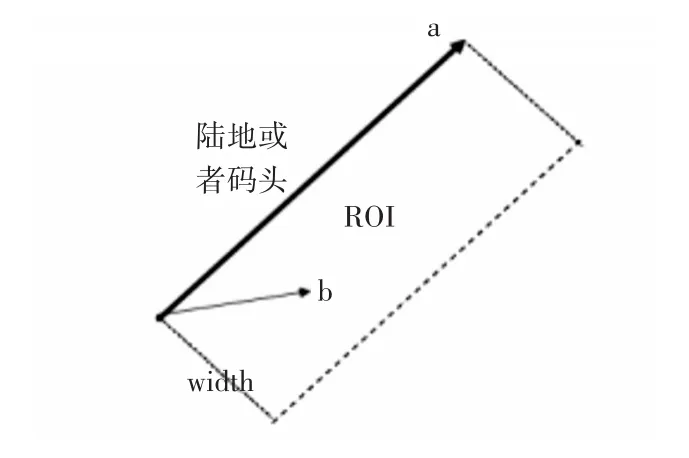
图2 ROI区域
2.3 ROI图像区域结果
结合上一节中的先验信息,利用匹配点计算仿射变换模型的转换参数,根据保存的模板图像港口的线段信息,进而求取目标图像中对应的码头区域。
仿射变换模型:
令 f(x,y)和g(x,y)分别为同一地区的两幅遥感图像,通常情况下,两者存在着一一对应的关系,满足某种几何关系。令(x,y)和(x',y')分别为图像f(x,y)和 g(x,y)中的像素点位置坐标,对应与实际中的相同位置,有:

其中 a1,a2,a3,a4以及 b1,b2为仿射变换参数。未知量为6个,则至少需要3对对应坐标点才能求解。可利用上一节的特征匹配点代入式(3)中求解反射参数。然后结合模板图像标记的位置信息,求解目标图像中码头的位置信息。
图3为模板图像,尺寸为3048*1481,分辨率为1m,图4为目标码头图像及其结果。

图3 模板图像
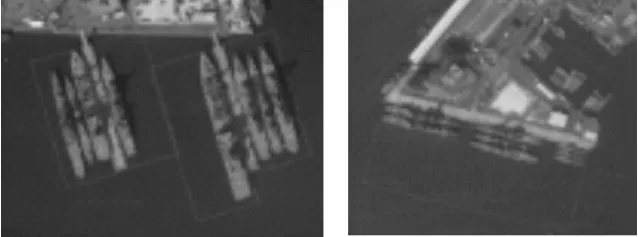
图4 ROI子图像区域
3 舰船目标检测
遥感图像在获取过程中,不可避免地受到噪声污染,为了分割出完整的目标,需对图像进行必要的预处理。图像平滑与图像增强是图像预处理中常用的处理方法,也是图像处理中的重要内容。另外,在ROI区域,有些并没有目标存在,需要筛选。
3.1 无目标图像筛选
我们利用图像的灰度直方图特点及自适应阈值来判定图像是否存在目标。如图5(a)所示,包含目标图像其共有特点呈现双峰性质,这样自适应阈值会在两波峰之间的波谷区域,也意味着阈值附近的像素数量较少,大部分集中在双峰附近。与之相反,无目标图像灰度直方图呈单峰状态,其自适应阈值在波峰区域,如图5(b)所示。

图5 无目标的图像灰度直方图
相对于有目标图像,无目标图像阈值附近的像素数量比例很大。利用这一特性,设定像素数量阈值即可判断有无目标。
3.2 基于区域对比度的显著性增强方法
由于大量阴影的存在,直接采用二值化效果并不好。因此需要采用图像增强的方法,本章采用基于区域对比度的显著性增强方法,即RC算法[12]。

图6 5种算法结果
RC算法是用基于图的快速分割算法将输入图像分割成若干区域,然后计算每一个像素块的显著性值,其从颜色差异,距离远近,基本像素块大小三方面进行显著性考虑,是目标较为优秀的显著性算法之一,检测结果精度高,且目标结果信息丰富。
计算显著性的公式为

其中,Ds(rk,ri)为两像素块空间距离,Dr(rk,ri)为颜色距离,σs决定空间关系的影响大小,w(ri)为区域权值,表示为像素数量。
选取5种具有代表性的显著性算法,对比结果如图6所示。
在各种显著性增强算法中,不管是在对比度还是处理阴影上,RC算法结果最好。
3.3 图像平滑
运用RC算法进行显著性增强后,阴影部分有很大改善,图像也出现较大的对比度差异,同时也产生了噪声,此时需要采用图像平滑算法,已实现较好的二值化效果。
为了获取更好的保持图像舰船边缘及其他重要信息,这里采用各向异性扩散滤波的图像平滑算法来进行去噪。
其迭代方程为

四个散度公式:

四个导热系数:
平滑后二值化,并利用形态学闭运算来填补阴影区域,可获得目标堆积区域的外轮廓,从而获取堆积区域的位置信息。
3.4 并靠舰船目标分割
对于舰船堆区域,统计横轴或纵轴方向上的像素分布情况,其必出现多波峰锯齿状。船头为局部波峰区域,船身接触处为局部波谷区域,因此可采用谷-峰-谷特征来确定单个舰船位置,实际情况中,为了避免毛刺突起而造成的误检,提高算法鲁棒性,这里采用均值滤波的方法,对像素数量进行平滑处理,最终精确获取船身接触位置,实现并靠目标的分割。
对于单个目标的区域以及分割之后的并靠目标,采用提轮廓的方法获取其在ROI区域的位置信息,然后利用仿射变换逆推出目标在原图像上的准确位置。
4 实验结果
论文选取了两幅具有代表性的光学遥感图像,分别来自日本佐世保和横须贺的港口遥感图像作为待检测图像,像素分辨率为1m,尺寸大小分别为4544*3337,2500*2117,由于图像过大这里只截取部分试验结果,如图7所示。

图7 检测结果
对于图8上重要的舰船目标,都能够较为准确的检测出来,在所有的74个舰船目标检测中,该方法总共检测出68个重要目标,检测率达到91.8%,且漏检目标为一般性船只,验证了该方法的可行性。
5 结语
本文描述了一种从遥感图像数据中检测停靠舰船的整体流程,该方法是结合SIFT特征匹配和基于区域对比度的显著性算法来实现的。此方法优点在于其适用性和准确性:1)适合任意港口,包括规则的人工港口和复杂的天然港口;2)人工标记模板港口信息,建立港口信息库,绕开了海陆分离的思路,使得准确度和适用性提高;3)将显著性算法运用于图像分割中,大大减少了阴影等因素的干扰。
[1]周拥军,朱兆达,丁全心.遥感图像中港口目标识别技术[J].南京航空航天大学学报,2008,40(3):350-353.ZHOU Yongjun,ZHU Zhaoda,DING Quanxin.Port Target Recognition of Remote Sensing Image[J].Journal of Nan⁃jing University of Aeronautics&Astronautics,2008,40(3):350-353.
[2]朱兵,李金宗,陈爱军.基于知识的快速港口识别[J].计算机应用,2006,26(3):729-732.ZHU Bing,LI Jinzong,CHEN Aijun.Fast knowledge based recognition of harbor target[J].Computer Applica⁃tions,2006,26(3):729-732.
[3]张志龙.基于遥感图像的重要目标特征提取与识别方法研究[D].长沙:国防科学技术大学,2005.ZHANG Zhilong.Feature Extraction and Recognition of Important Targets in Remote Sensing Imagery[D].Chang⁃sha:National University of Defense Technology,2005.
[4]柴宏磊.基于知识的遥感图像港口目标识别[D].成都:电子科技大学,2015.CHAI Honglei.Research on Port Target in Remote Sens⁃ing Images based on Knowledge[D].Chengdu:University of Electronic Science and Technology of China,2015.
[5]赵波.遥感图像目标识别算法研究[D].长沙:国防科学技术大学,2004.ZHAO Bo.A Research on Target Recognition Algorithms for Remote Sensing Image[D].Changsha:National Univer⁃sity of Defense Technology,2004.
[6]Mandal D P,Murthy C A,Pal S K.Analysis of IRS imag⁃ery for detecting man-made objects with a multivalued rec⁃ognition system[J].IEEE Transactions on Systems Man&Cybernetics Part A Systems&Humans,1996,26(2):241-247.
[7]杨耘,王树根,邱丹丹.基于规则的高分辨率影像港口识别模型[J].测绘地理信息,2005,30(5):40-42.YANG Yun,WANG Shugen,QIU Dandan.Harbor Recog⁃nition Model from High Resolution Images Based on Rules[J].Journal of Geomatics,2005,30(5):40-42.
[8]丛瑜,周伟,于仕财,等.一种对港口影像进行舰船目标提取方法[J].计算机仿真,2014,31(1):22-25.CONG Yu,ZHOU Wei,YU Shicai,et al.Method for Ex⁃traction of Ship Target from Remote Sensing Images[J].Computer Simulation,2014,31(1):22-25.
[9]李艳,彭嘉雄.港口目标特征提取与识别[J].华中科技大学学报(自然科学版),2001,29(6):10-12.LI Yan,PENG Jiaxiong.Feature Extraction of the Harbor Target and Its Recognition[J].Journal of Huazhong Uni⁃versity of Science&Technology,2001,29(6):10-12.
[10]Lowe D G.Distinctive Image Features from Scale-Invari⁃ant Keypoints[J].International Journal of Computer Vi⁃sion,2004,60(2):91-110.
[11]张振,徐守时,胡俊华,等.基于局部特征的遥感图像快速自动配准[J].计算机工程与应用,2010,46(13):161-163.ZHANG Zhen,XU Shoushi,HU Junhua,et al.Fast auto registration of remote sensing image based on local fea⁃ture[J].Computer Engineering and Applications,2010,46(13):161-163.
[12]Cheng M M,Mitra N J,Huang X,et al.Global Contrast Based Salient Region Detection.[J].Pattern Analysis&Machine Intelligence IEEE Transactions on,2015,37(3):569.
[13]Hou X,Zhang L.Saliency Detection:A Spectral Residu⁃al Approach[C]//Computer Vision and Pattern Recogni⁃tion,2007.CVPR'07.IEEE Conference on.IEEE,2007:1-8.
[14] Achanta R,Hemami S,Estrada F,et al.Frequen⁃cy-tuned salient region detection[C]//Computer Vision and Pattern Recognition,2009.CVPR 2009.IEEE Con⁃ference on.IEEE,2009:1597-1604.
[15]Zhai Y,Shah M.Visual attention detection in video se⁃quences using spatiotemporal cues[C]//ACM Interna⁃tional Conference on Multimedia.ACM,2006:815-824.
[16]Cheng M M,Mitra N J,Huang X,et al.Global Contrast Based Salient Region Detection.[J].Pattern Analysis&Machine Intelligence IEEE Transactions on,2015,37(3):569.