自动喷码分拣机虚拟样机设计
2018-04-25曾祥丹
曾祥丹


摘 要:擬开发一款用于液晶面板生产车间的实现产品喷码、校验码、产品按等级分拣的自动化装置。由于自动喷码分拣机的研制属于非标准机械设计,无类似设计和经验可以参考,难免引起一些无法预知的问题,而利用SolidWorks软件构建三维模型,并且完成该装置的虚拟样机设计,可以为后续物理样机的制作提供理论依据和经验参考。
关键词:自动喷码;物料分拣;虚拟样机;SolidWorks
1 引言
随着液晶面板在电视、手机、笔记本电脑、显示器以及手持终端设备等领域的广泛应用,近年来发展迅猛,已受到人们的广泛关注。目前在液晶面板生产过程中,物料分拣工序还是人工操作,因该工序的工作需要大量的人力和时间,从而导致生产周期长、人力和生产成本高等问题。为了进一步提升企业的智能制造水平,本文采用SolidWorks软件设计了一款专门用于液晶面板生产车间的,能够实现液晶面板的自动喷码和分拣的新型装置。
在该装置的研制过程中,利用SolidWorks软件构建零件的三维模型,并组装成虚拟样机,可以清晰地表达零部件的装配关系,给人以直观的认识,为后续物理样机的制作提供理论依据。
2 总体结构设计和工作原理
2.1 总体结构
根据液晶面板的生产工艺要求,经过多次的理论分析、方案论证和实验验证,最终确立自动喷码分拣机的总体设计方案,整体结构如图1所示。
该装置主要由机架、产品传输与分拣系统、托盘循环系统和控制系统等组成。整体结构采用对称式布置,两组托盘的进料口和成品出料口分别布置在两侧,可实现产品按A级和B级出货,避免不同等级的产品混淆,节省空间和制造成本,便于人员操作、维护和维修。
1-机架;2-产品传输与分拣系统;3-托盘循环系统;4-托盘进料口;5-成品出料口;6-不合格品取料口
2.1.1 产品传输与分拣系统
该系统主要由上料机器人、多组高精度工业相机、上料皮带线、来料翻转机构、产品喷码皮带线、读码器、喷码器、下料翻转机构、下料机器人、下料皮带线和不合格品皮带线等组件构成,用于实现产品检测、搬运、物料号码识别、产品正反面切换、喷码、喷码校验、喷码品相检验和按等级分拣等功能,该系统结构如图2所示。
由于产品的生产节拍要求为3.5s,产品的来料始终是反面朝上,但是位置不固定,而且产品外框与托盘型腔外框的间隙仅为±0.3mm,本文设计采用四轴机器人和工业相机搭建一套物料搬运系统,工业相机用于拍摄来料产品的图像,控制系统对图像的位置数据进行分析和处理,转换成为运动控制系统的坐标信息,再将这些坐标信息传输到机器人的控制器中,控制机器人实现产品的自动抓取、搬运和分拣装盘,使该装置具有更高的生产柔性。
1-1#工业相机;2-上料皮带线;3-上料机器人;4-来料翻转机构;5-产品喷码皮带线;6-读码器;7-3#工业相机;8-下料翻转机构;9-下料皮带线;10-不合格品皮带线;11-产品下料位置;12-下料机器人;13-喷码器;14-2#工业相机
2.1.2 托盘循环系统
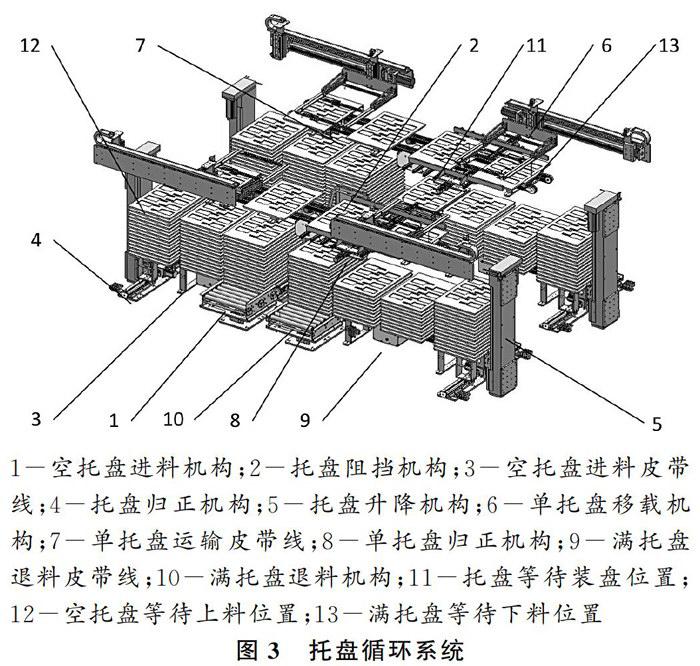
该系统主要由空托盘进料机构、托盘阻挡机构、空托盘进料皮带线、托盘归正机构、托盘升降机构、单托盘移载机构、单托盘运输皮带线、单托盘归正机构、满托盘退料皮带线和满托盘退料机构等组成,用于实现空托盘上料、升降、单托盘分离、单托盘运输定位、满托盘叠放、满托盘下料的循环周转功能,为下料机器人摆放产品供给空托盘,系统结构如图3所示。
1-空托盘进料机构;2-托盘阻挡机构;3-空托盘进料皮带线;4-托盘归正机构;5-托盘升降机构;6-单托盘移载机构;7-单托盘运输皮带线;8-单托盘归正机构;9-满托盘退料皮带线;10-满托盘退料机构;11-托盘等待装盘位置;12-空托盘等待上料位置;13-满托盘等待下料位置
2.2 工作原理
本文设计的自动喷码分拣机的工作原理为:作业员确定当日生产的产品规格后,在操作界面内录入产品信息,并将整摞的空托盘置于进料口,托盘将自动进入装置内,托盘循环系统将自动完成托盘的整摞运输、定位、提升、分单盘、单盘定位、单盘运输、产品摆盘和满盘码放等工作。
该装置的产品抓取、搬运和分拣的运行模式分为如下两种情况:
第一种情况:来料产品的物料号码朝上,当来料传感器检测到上游设备传输来的产品时,1#工业相机启动拍摄产品的位置,并识别产品的物料号码上传到控制系统,下载条码信息给喷码机,同时由上料机器人抓取产品放在上料翻转机构上,经过翻转、喷码、读码校验、喷码品相校验等工序后,将产品传输至下料机器人下方的产品下料位置。此时,如果产品是反面朝上出货,下料翻转机构启动从下料皮带线上抓取产品,完成翻转动作后,下料机器人从下料翻转机构上抓取产品,然后按A级和B级分别摆放至两侧下料托盘;如果产品是正面朝上出货,下料机器人直接从下料皮带线上抓取产品,按A级和B级分别摆放至两侧下料托盘,最后将满托盘码放完成后出货;不合格品由下料机器人直接抓取到不合格品皮带线上。
第二种情况:来料产品的物料号码朝下,当来料传感器检测到上游设备传输来的产品时, 1#工业相机启动拍摄产品的位置,再由上料机器人抓取产品放在上料翻转机构,完成翻转动作后将产品放在喷码皮带线上,然后2#工业相机启动拍摄并识别产品的物料号码上传到控制系统,下载条码信息给喷码机,产品经过喷码、读码校验、喷码品相校验等工序后,将产品传输至下料机器人下方的产品下料位置。后续下料机器人抓取产品的运行模式与第一种情况相同,此处不再赘述。
2.3 主要技术参数
本文设计的全自动喷码分拣机的主要技术参数见表1。
3 虚拟样机的设计过程
3.1 设计方法
SolidWorks软件的参数化设计是以约束造型为核心,以尺寸驱动为特征,允许设计者先进行二维草图设计,勾画出零件的特征轮廓,然后输入约束和尺寸数值来完成最终的设计,并能够方便、快捷地创建几乎任何复杂形状的实体模型,可以满足绝大部分的工程设计的需要;SolidWorks有统一的内部数据库,所有数据都相互关联,任何一个功能模块中对零件的修改都会自动反映到其他模块中。
SolidWorks軟件的装配体设计包括自底向上设计和自顶向下设计两种方法,如果是首先设计完成所有零件模型,然后将零件作为部件添加到装配体中,称之为自底向上设计;如果是首先设计好装配体模型,然后在装配体中组建模型,最后生成零件模型,则称之为自顶向下设计。一般在实际设计过程中,并不是只采用一种设计方法,往往是两种方法结合使用。
3.2 建模过程
基于SolidWorks软件的零件建模,实际上是创建零件的实体特征和一些用户定义的特征。其中有些特征通过添加材料的方式创建,而有些特征则是通过去除材料的方式创建。
首先要从整体上分析自动喷码分拣机的结构特征,明确不同特征之间的关系,然后确定各个特征的创建顺序, 在此基础上利用SolidWorks软件进行建模和添加工程特征,通过二维平面草绘图的旋转、拉伸、切除、扫描和混合等工具来构建三维实体模型。
3.3 三维虚拟装配
虚拟装配是产品设计的重要环节,也是检验产品的理论设计是否合理的重要方法。
本文采用自底向上的设计方法完成自动喷码分拣机虚拟样机的设计,首先在SolidWorks软件内建立所有零件的三维模型,由于在组建装配体时SolidWorks软件会自动将第一个调入的零件默认为固定不动,所以本文在进行虚拟装配时第一个调入机架,并以机架为装配基准,然后在此基础上插入其他零部件。
SolidWorks软件系统提供了同轴、平行、垂直、 重合、距离等十多种标准配合方式,是保证零件之间进行准确装配的基本命令,由于本文设计的自动喷码分拣机的零件数量比较多,所以在装配前对该装置各级部件的层次关系、约束关系以及相对运动关系进行了详细的规划,高效顺利地完成了总装配体。
3.4 干涉检查
基于SolidWorks软件的装配体的静态干涉检查是指在特定的装配结构形式下,检查装配体的各个零部件之间的相对位置关系是否存在干涉;而动态干涉检查是指检查装配体之间或者零部件之间在运动过程中是否存在干涉,确保各个零件在空间上不出现重叠。在装配体模式下,选择干涉检查,系统会生成干涉分析结果,然后依据该结果,对相关零部件结构参数进行优化处理。
3.5 工程图设计
SolidWorks软件的所有二维工程图都可以从三维实体模型转换出来,转换后的图形非常准确,设计人员可以根据需要完成零件视图、尺寸标注、形位公差标注、表面粗糙度标注等,并且二维工程图会自动链接到三维实体模型,如果修改了三维实体模型的某些特征或者尺寸,二维工程图会自动更新,便于三维实体模型和二维工程图纸的修改和管理。
4 结论
本文基于SolidWorks软件完成了自动喷码分拣机虚拟样机的设计,该三维虚拟样机可充分表达设计意图,为此类装置的设计提出了一种新的思路。采用SolidWorks软件的参数化设计方法,可以快速地完成整体结构、干涉检查、结构优化以及工程图设计,极大地提高了机械设计人员的工作效率,节约制造物理试验样机的成本,缩短新机型的研发周期。
参考文献
[1]喻娟,刘冬,徐利燕,等.基于单色光下ADS模式TFT-LCM闪烁飘逸的对比研究[J].液晶与现实,2016,31(5):449-453.
[2]岑军健.非标准机械设计手册[M].1版.北京:国防工业出版社,2008:19-23.
[3]陈宏均.实用机械加工工艺手册[M].3版.北京:机械工业出版社,2011:488-496.
[4]SMC(中国)有限公司.现代实用气动技术[M].3版. 北京:机械工业出版社,2008:154-160.
[5]周军.电气控制及PLC[M].3版.北京:机械工业出版社,2015:148-164.
[6]顾新建,杨青海,纪杨建,等.机电产品模块化设计方法和案例[M].1版.北京:机械工业出版社,2013:28-50.
[7]杨晓钧,李兵.工业机器人技术[M].1版.哈尔滨:哈尔滨工业大学出版社,2015:14-20.
[8]韩九强.机器视觉及应用[M].1版.北京:高等教育出版社,2009:5-25.
[9]董西军.基于SolidWorks的参数化设计[J].机械制造与研究,2007,2:26-30.
[10]商跃进,曹茹.SolidWorks三维设计及应用教程[M].北京:机械工业出版社,2008.