冗余电位器加速踏板故障诊断策略研究
2018-04-25刘波
刘 波
(陕西工业职业技术学院 陕西 咸阳 712000)
引言
随着汽车电控系统的发展,目前汽车上主要采用电子加速踏板,汽车电子加速踏板使用传感器采集当前踏板位置信号,经电控单元ECU处理后,有效地控制喷油器的开启、关闭时间来确定喷油量[1]。为了保证加速踏板持续稳定的工作,加速踏板一般采取冗余电位器类型,冗余电位器踏板上有两个独立的位移传感器,将踏板位置信号转变成电压模拟信号。根据当前踏板位置的变化,相应的输出端电阻值发生变化,从而引起输出的电压信号发生变化,因此通过测试输出电压即可得出当前的踏板位置。但是电子加速踏板一旦出现故障,将对驾驶员以及他人人身安全造成极大的危害[2]。为了提高驾驶安全性,必须对加速踏板故障进行相应的检测诊断,通过故障诊断,故障鉴定,故障处理和信号选取等故障诊断控制策略以保证在发动机加速过程中,诊断出故障并且能进行相应的处理以及替代值输出,有效保障发动机在故障情况下继续运行。但是由于目前大多数加速踏板在出现故障时将踏板的电压输出值定为0,在故障恢复的过程中又直接恢复到当前踏板输入量,这样的输出会导致发动机转速急速上升,影响驾驶安全性。在本文中,采用斜坡函数处理方式,使加速踏板值由0恢复到当前值的时候以一定的斜率上升,避免了发动机转速的急速上升,有利于保证驾驶安全性。因此此加速踏板故障诊断策略不但保障在故障情况下发动机能继续运行,并且能保障行驶安全性。
1 电子加速踏板简介
图1为冗余电位器加速踏板传感器特性线。汽车电子加速踏板主要分为两类:单电位器型和冗余电位器型(双电位器型)。单电位器加速踏板一旦发生故障将不能运行,冗余电位器加速踏板由于采用两个传感器,一旦一个传感器发生故障,另一个传感器进行接替,有效保障加速踏板正常工作。基于加速踏板持续运行的考虑,采用冗余电位器型加速踏板。冗余电位器加速踏板传感器由5 V电源供电,在相同的踏板位置下,传感器APP1的输出电压大约是传感器APP2输出电压的2倍[3]。经反复测量,传感器APP1在踏板空载位置输出电压为0.75 V,在满载位置输出电压为4.5 V;传感器APP2在空载位置输出电压为0.375 V,在满载位置输出电压为2.25 V。

图1 冗余电位器的加速踏板传感器特性线
2 信号诊断过程
图2为诊断过程模型。典型的加速踏板信号诊断过程包括故障诊断,故障鉴定,故障处理、信号选取。故障诊断是对信号范围和信号关联性进行检测,故障鉴定就是对信号的性质进行判定,判定是否为偶发还是最终故障,然后进行信号处理和信号选取,对于不同类型和不同性质的信号故障进行相应的信号选取,信号选取是针对信号范围检测和关联性检测中信号为偶发故障还是最终故障进行相应替代值输出。
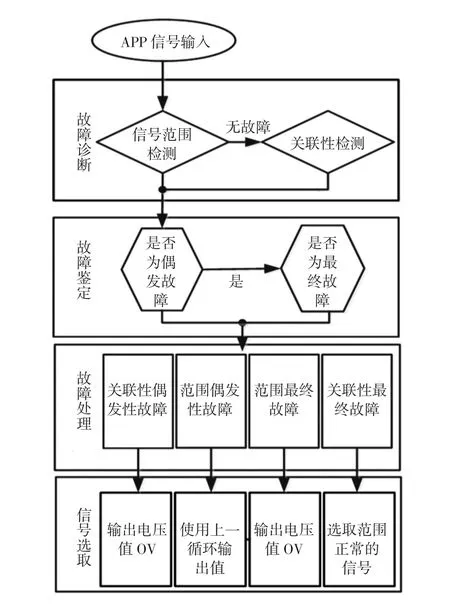
图2 典型的信号诊断过程
3 信号范围检测和关联性检测
3.1 信号范围检测
图3为信号范围检测控制模型示意图。初始信号通过模数(A/D)转换为ECU可以识别的数字信息。由于踏板部件的老化易造成电路的短路和断路,电路短路造成发动机不断增大喷油量,转速一直增加,造成安全隐患;电路断路造成发动机行驶过程中熄火,影响驾驶安全性。进行传感器信号范围的诊断,用于判断传感器信号回路的短路、断路等极端情况。
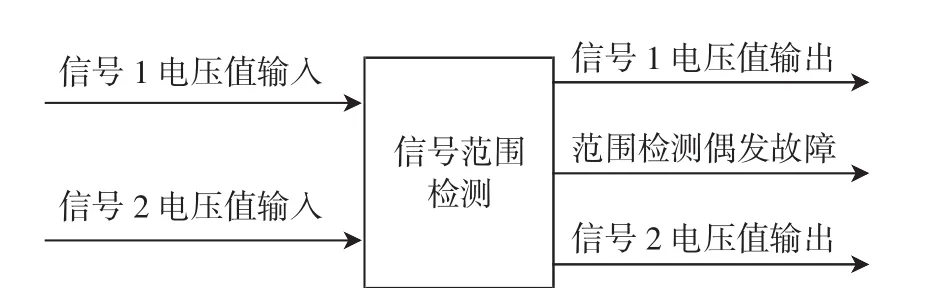
图3 范围检测控制模型示意图
图4 为信号范围检测MATLAB程序图,当检测到信号1输入电压值大于4.5 V或小于0.75 V或信号2电压输入值大于2.25 V或小于0.375 V时就可判断油门发生范围检测故障,输出标志1,随即树立为偶发故障,当故障消失时输出标志0。

图4 范围检测MATLAB程序图
3.2 关联性检测
图5 为关联性检测控制模型示意图。采用双电位器加速踏板是保证当一路信号出现故障时,采用另一路信号以保证发动机能安全地运行,信号1电压值一般为信号2电压值的两倍。两路电压值经过信号范围检测之后,如果信号没有范围缺陷,如果两路信号出现不一致的情况时,发动机对踏板信号的采集就会出现错乱,极易造成喷油紊乱,造成发动机转速不稳定,因此必须两信号进行关联性诊断。关联性诊断如公式(1)所示。

式中:u1是信号1电压值,u2是信号2电压值,u是u1和u2的和,U为5 V。
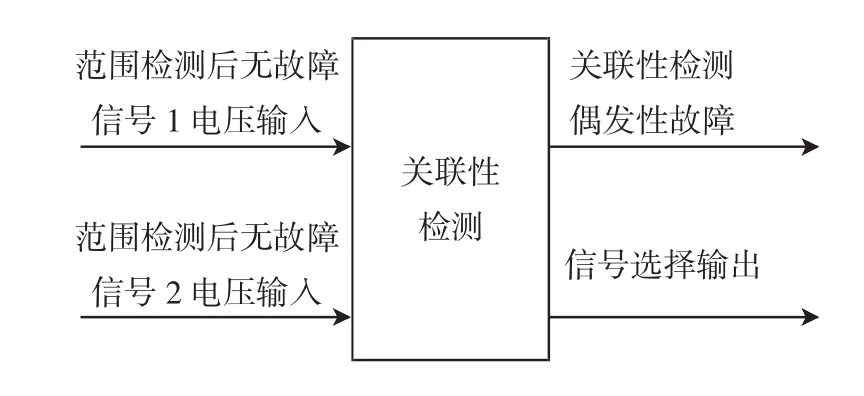
图5 关联性检测控制模型示意图
由于公式(1)计算得出此值在0.021 5之间小范围浮动,因此设定绝对差为0.022 V。图6为关联性检测MATLAB程序图。当信号1输入值减去信号2电压值的2倍大于绝对误差0.022时,则认为此时两路电位器的关联性出现问题,选择标志1,输出电压值为0 V,当信号恢复正常后,选择标志位0,选择两信号中正常范围的电压输出。
4 故障鉴定
图7为时间预消抖检测控制模型。与每一环节故障诊断相对应的都有故障鉴定,故障鉴定就是确定信号是偶发故障还是最终故障[4]。对于发动机机电控系统在运行过程中,由于电磁干扰,可能会出现偶发性故障。偶发性故障只需采用上一循环的值,比如ECU检测到加速踏板传感器一个超限信号,在此后相当长的时间内该信号都正常,就属于偶发性故障。要对检测出的不正常信号采用一定的故障消抖(debouncing)方法进行处理:消抖法一般有时间消抖法和事件消抖法。时间消抖法是通过启用定时器来实现的,当错误信号出现时,定时器开始定时累加,时间的累加超过一定的阈值时,偶发故障确定为最终故障。对于最终故障要进行相应的缺省值代替,以保证发动机安全运行,时间预消抖检测控制模型如图7所示。

图6 关联性检测MATLAB程序图
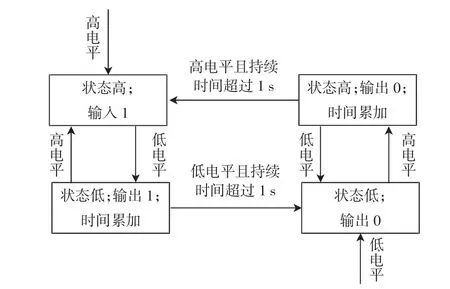
图7 时间预消抖检测控制模型
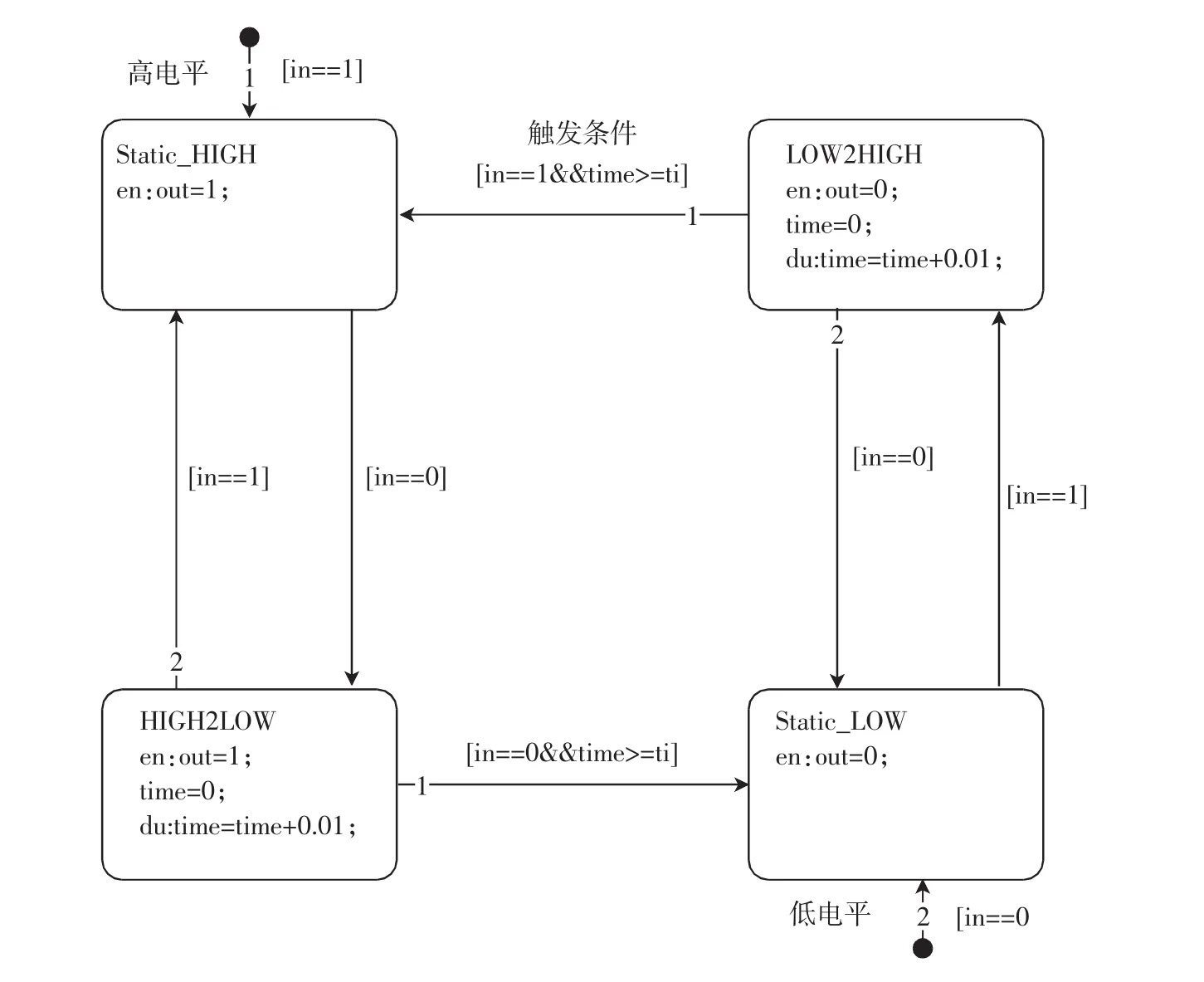
图8 时间消抖StateFlow程序图
图8 为时间消抖StateFlow图。当偶发故障输入为0时,时间消抖输出为0,偶发故障输入为1时,时间消抖输出为0,随后对故障进行计时加,当累加0.1s后,偶发输入为0,此时时间消抖输出为0,认为故障修复。如果偶发输入还是1,此时时间消抖输出为1,确定为最终故障。
5 故障处理和信号选取
图9为故障处理和信号选取模型示意图。加速踏板出现故障主要完成两种处理方式:一是生成故障标志位,点亮故障灯和生成故障代码,提醒驾驶员维修。二是根据故障程度,进行相应的故障处理,将故障的类型进一步分类,对各分类信号做出相应的替代值输出。南京航空航天大学汪东坪等、上海交通大学梁锋博士等、上海海能汽车电子公司祝轲卿博士等,都在故障处理和信号选取中有效地使用替代值,保证加速踏板故障时能继续行驶,但在信号故障恢复处理中直接使故障信号恢复到当前信号,这一处理方式易造成发动机转速突变,影响行驶安全性[5-7]。基于行驶安全性的考虑,采用斜坡函数保持故障信号以一定的斜率上升达到当前信号值,保证发动机不会出现转速突变。采用故障处理和信号选取模块,以保证油门踏板出现故障时,车辆能安全地完成行驶。对经过检测的信号再进一步进行PT1滤波处理,防止信号不稳定造成喷油量不断变化,影响行驶安全性。
斜坡函数处理模块:在故障恢复过程中,为防止发动机出现转速急速上升,采用斜坡函数使加速踏板电压值由0以一定斜率逐渐达到当前值,斜坡函数公式如下:

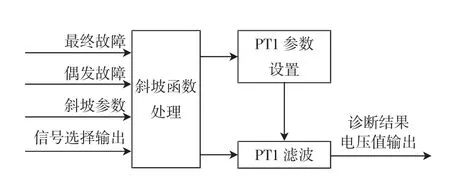
图9 故障处理和信号选取控制模型示意图
图10 为故障处理和信号选取MATLAB程序图。如果出现两个信号不在正常范围的最终故障时,将踏板输出信号置为0;当故障消失时,加速踏板使用当前信号值。如果出现合理性故障时,及时将踏板值置为0,然后输出两个电压值中在正常范围的电压值。
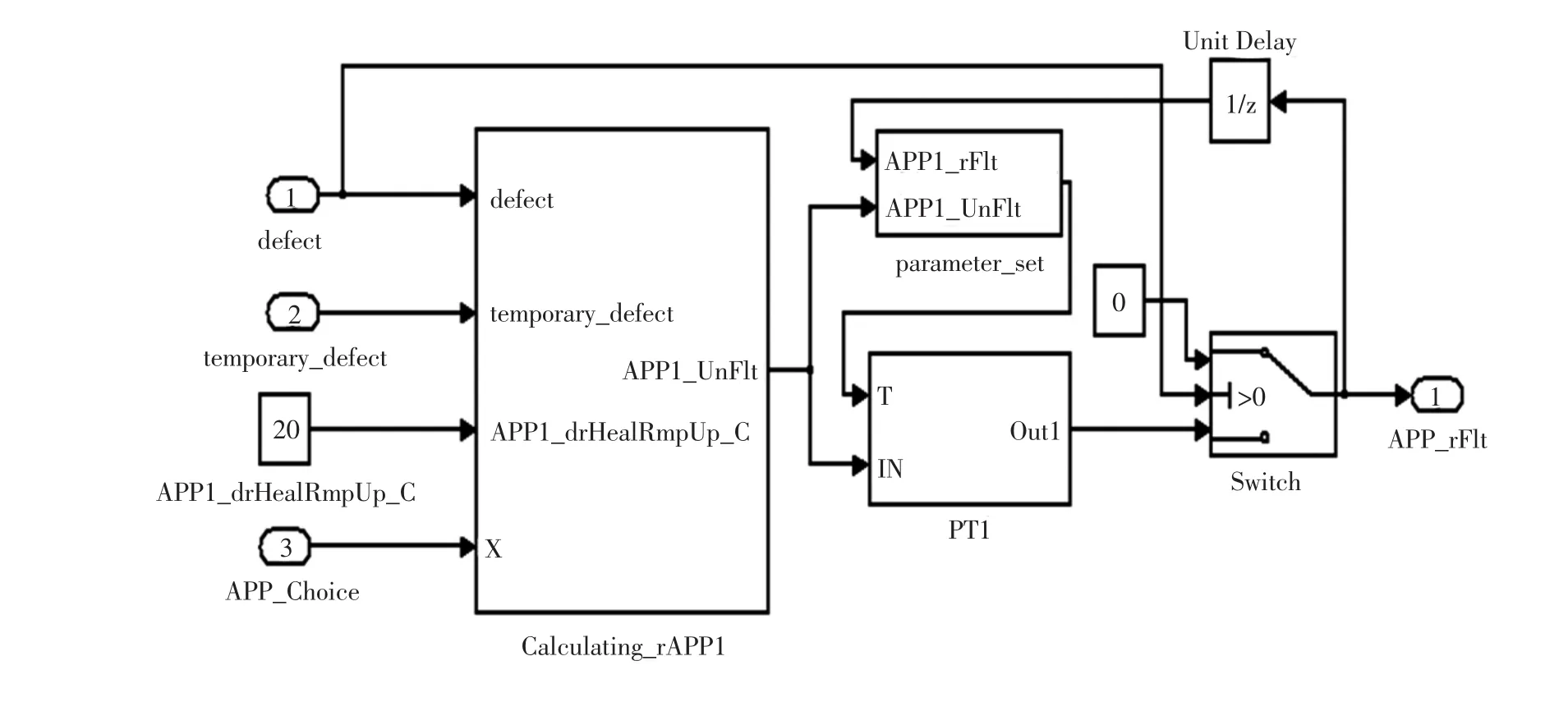
图10 故障信号处理及缺省输出MATLAB程序图
6 仿真测试
6.1 测试项目
为了确定整个控制过程的可靠性,对整个控制过程进行仿真测试,根据控制流程,设定以下测试项目:范围检测、关联性检测、预消抖、故障信号处理及缺省值输出模型。
6.2 建立测试模型
图11为建立的仿真测试控制模型示意图。其中信号1电压值是信号2电压值输入的两倍左右,输入信号经范围检测、关联性检测、预消抖、故障处理及缺省值输出。

图11 仿真控制模型示意图
6.3 测试结果分析
利用MATLAB/Simulink及StateFlow工具编写了策略框图[8],然后通过Targetlink自动代码生成工具将Simulink模型生成C代码,并集成到云南省内燃机重点实验室自主开发的ECU中,构成控制原型系统。通过信号发生器模拟设定的踏板位置电压信号,用作控制系统的输入。
图12为两个信号输入电压值均超出范围测试结果。由图分析可知,APP1和APP2在整个测试过程中信号从0.18 s开始超出最大上限电压值,并且这一故障一直持续超过一定时间,因此被确定为最终故障,此时将加速踏板值置为0。从0.38 s开始故障修复,采用斜坡函数使加速踏板值以一定的斜率恢复到当前值。在0.83 s以及在1.48s时故障再次出现并被确定为最终故障,信号再次以同样的方式输出。
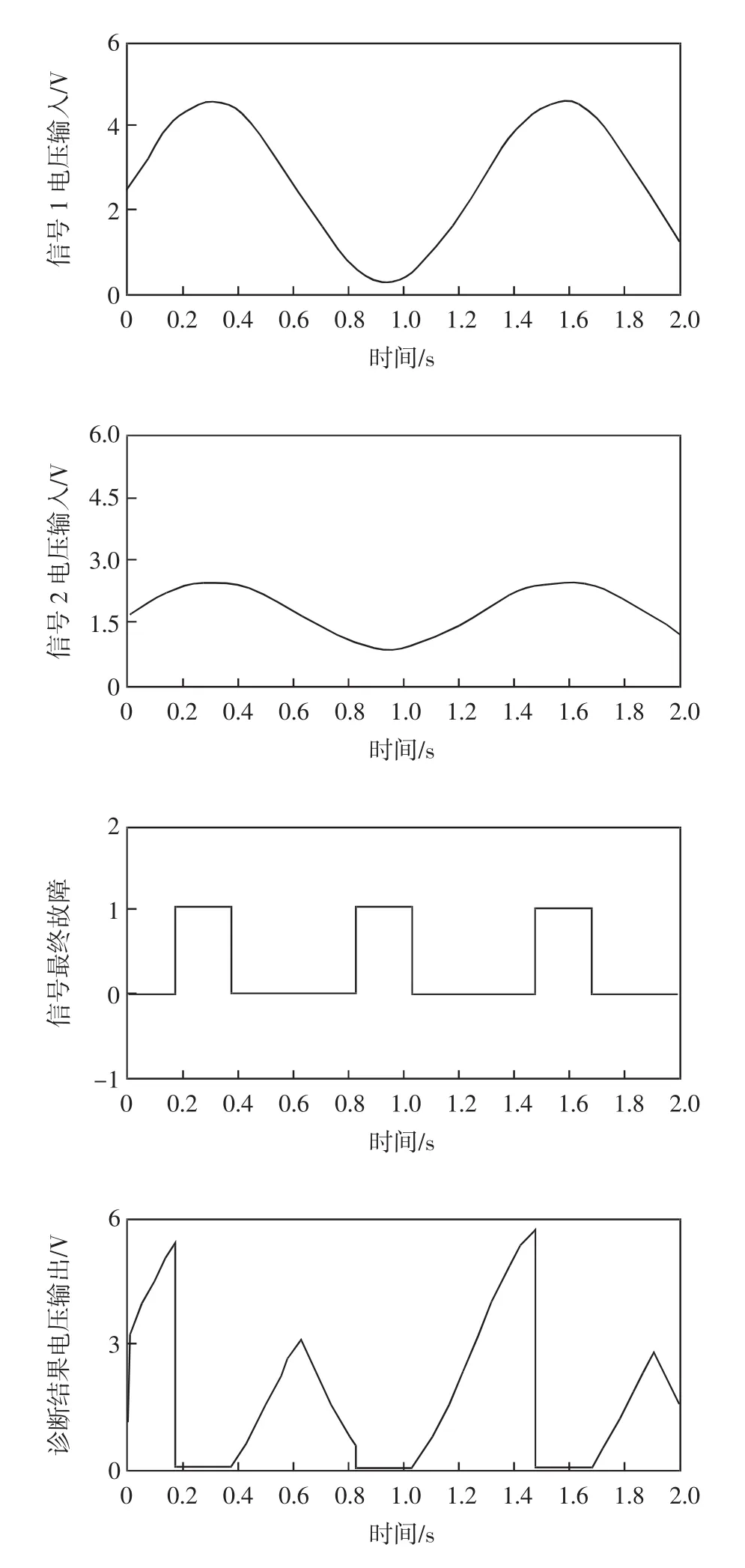
图12 超出范围故障仿真测试
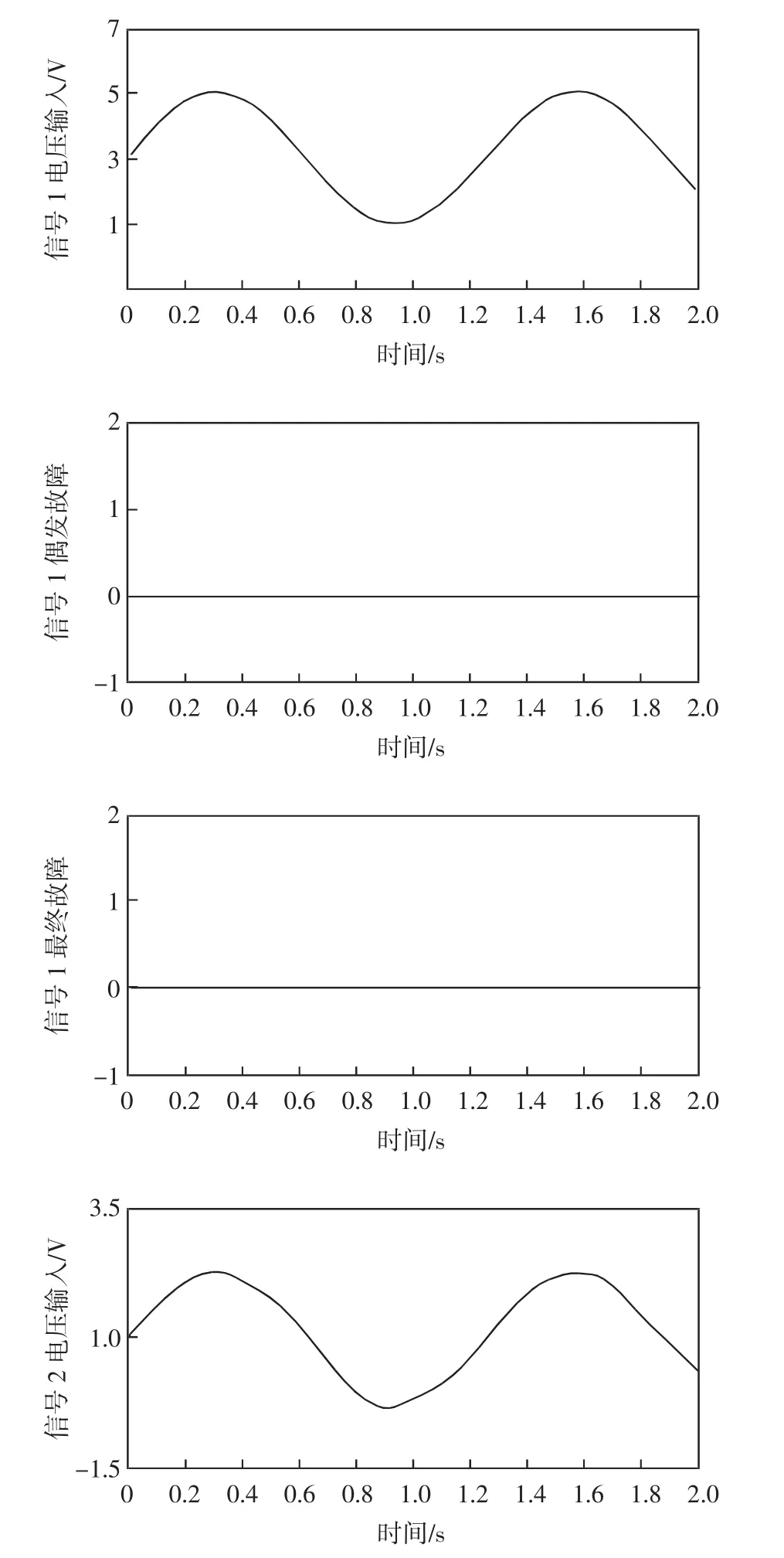
图13为两个输入信号电压值关联性故障测试结果。由图分析可知,APP1在整个周期内信号范围检测正常;APP2在第0.3 s信号范围出现偶发故障,第0.4 s经预消抖确定为最终故障,且将一直保持故障状态。在0~0.08 s之间,APP1正常,APP2正常,且APP1的电压值与2倍的APP2电压值差值的绝对值不大于0.022 V,因此输出传感器APP1信号;在0.08~0.3 s之间,APP1正常,APP2正常,但APP1的电压值与2倍的APP2电压值差值的绝对值大于0.022 V,出现关联性故障,因此输出电压值为0;从0.4 s开始,传感器APP2故障,APP1正常,因此输出APP1的电压值,直到测试完成。验证了控制策略,测试了冗余电位器加速踏板的实际工作状态,证实了该控制策略的可行性和可靠性。

图13 关联性故障仿真测试
7 结论
基于冗余电位器加速踏板工作原理,建立了加速踏板的MATLAB/simulink及Stateflow的控制策略模型,并通过建模仿真对整个过程进行了测试,结果表明:
1)通过信号范围检测和关联性两级检测,可以检测出实际中绝大部分的故障,采用斜坡函数的处理故障,成功地解决了发动机转速突变的问题。
2)通过时间预消抖的方式,能准确地检测出偶发故障和最终故障,避免了偶发故障出现时的不必要检测,降低了维修的成本。
3)在加速踏板信号出现故障的过程中,针对于偶发故障和最终故障提供了相应的缺省值替代,确保发动机在加速踏板发生故障的情况下,重复发动机和车辆的安全运行。
1 Yuan Xiaofang,Wang Yaonan,Wu Lianghong,et a1.Neural network based self-learning control strategy for electronic throttle valve[J].IEEE Transactions on Vehicular Technology,2010,59(8):3757-3765
2 王晨,张彤,于海生,等.电子踏板信号采集及故障诊断策略研究[J].车辆与动力技术,2010(4):49-52
3 周兴利,于世涛.电子油门故障自诊断策略及标定方法研究[J].车用发动机,2006(2):29-33
4 路琼琼,申立中,徐劲松,等.高压共轨柴油机故障诊断系统控制策略研究[J].内燃机工程,2011,32(3):25-30
5 汪东坪,李舜酩,魏民祥,等.汽车电子加速踏板可靠性控制的研究[J].汽车工程,2012,34(8):41-46
6 祝轲卿,胡建文,冒晓建,等.电控柴油机双电位器油门踏板控制策略的研究[J].柴油机,2012,34(4):14-17,52
7 梁锋,肖文雍,谭文春,等.高压共轨式电控柴油机电子油门故障自诊断策略研究[J].汽车技术,2004,7(5):35-38
8 王江,付文利.基于MATLAB/Simulink的系统仿真权威指南[M].北京:机械工业出版社,2013
