高压输电杆塔保护接地装置的设计和仿真
2018-04-24吴正树
吴正树,唐 静
(1.中国南方电网超高压输电公司南宁局,广西 南宁 530021;2.深圳市新南润电力科技有限公司,广东 深圳 518114)
0 引言
接地装置不仅为各种电气设备提供一个公共的参考地,而且在发生故障或雷击时能够将故障电流或雷电流迅速散流,其可靠性及安全性能一直受到设计和生产运行部门的高度重视。电力系统接地就其目的来说可分为工作接地、防雷接地和保护接地3种,其中保护接地通常用于电力设备安装、检修维护和改造过程中为保证人身安全必须接地的情况,因此接地的可靠性、操作便利性成为相应接地装置工作性能的重要衡量指标。
在现有的高压输电杆塔保护接地装置中存在诸如自锁性能不可靠、结构笨重、操作过程中容易出现故障与事故等诸多缺陷。基于此,将多自由度机构用于接地装置的设计中,研发一种二自由度、完全解耦的RRRR-P并联接地机构,并利用ADAMS软件进行多体运动学分析,探讨机构的基本特征与关键参数影响机构运动特性的原理。
1 接地机构设计与关键参数
1.1 机构简图
接地机构设计如图1所示,该接地机构采用1条动支链和1条静支链(固定夹爪),属于一种二自由度且完全解耦的RRRR-P并联接地机构。
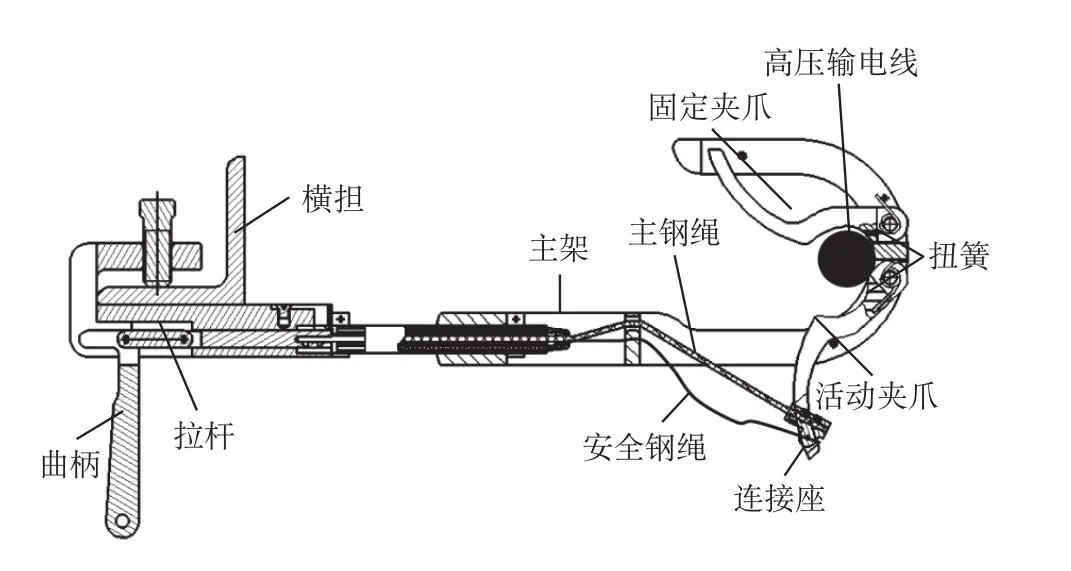
图1 接地机构示意
固定在杆塔角钢横担上的曲柄滑块机构控制活动夹爪克服扭转弹簧的阻力向静支链靠近。由于杆塔安装于地面上,因此待活动夹爪与固定夹爪紧握高压输电线时,即完成了高压线路的接地作业。曲柄转过90°之后主钢绳张紧(安全钢绳始终放松),此时机构进入“死点”自锁位置。突发情况下主钢绳断裂时主架会发生移动,此时安全钢绳被张紧,因此依然能保证高压线处于接地状态,这对保证工作人员安全至关重要。
1.2 机构运动简图与关键参数
接地机构的运动如图2所示,由图2可知本机构为由曲柄滑块机构驱动的五杆机构,驱动连接座的主钢绳理想化为驱动杆,其前端运动可看作沿滑槽的纯移动,活动夹爪则作定轴转动。图2所示的偏置距离e、仰角φ、扭簧的刚度系数k为影响机构运动特性的主要参数。图2主要参数的符号和含义如表1所示。其中l1,l2,l3分别为活动夹爪、连接座、驱动杆的长度。固定夹爪为常静状态,在建立机构的运动学模型时可以不予考虑。

图2 接地机构运动示意

表1 图2主要参数的符号和含义
2 接地机构的运动学模型
由图3可知,接地机构的自锁能力是通过对心曲柄滑块机构实现的,自锁失效发生在CB杆为主动件、AC杆为从动件时,此时传动角δ可由余弦定理计算得出:
2.1 接地机构的自锁原理
接地机构在其进入工作状态后具有自锁的能力,该部分原理如图3所示。


图3 接地机构自锁原理
因此,当CB杆与AC杆共线时δ=0,此时机构处于自锁状态。
2.2 接地机构执行件的运动学模型
本机构中驱动杆为主动件,活动夹爪为执行件。为便于模型的建立,在求解过程中假定活动夹爪为主动件,由此得出活动夹爪做定轴转动时驱动杆的运动学方程,最后求解其运动学方程的逆向解即可得出活动夹爪的运动学模型。
根据D-H理论,参照图2可得出驱动杆D-H坐标系参数,如表2所示。其中θi为关节变量角,αi-1为杆件扭角,ai-1为杆件长度,di为偏置量。

表2 驱动杆的D-H坐标系

于是:

由式(3)可得出驱动杆的运动方程的其次坐标表达式为:


将式(2),(3),(5)代入式(4)中并展开,即可得出驱动杆末端在空间的任意一点的位置方程:

对式(6)求关节变量θ1,θ2,θ3的偏导数,可得驱动杆的雅可比矩阵:

即:
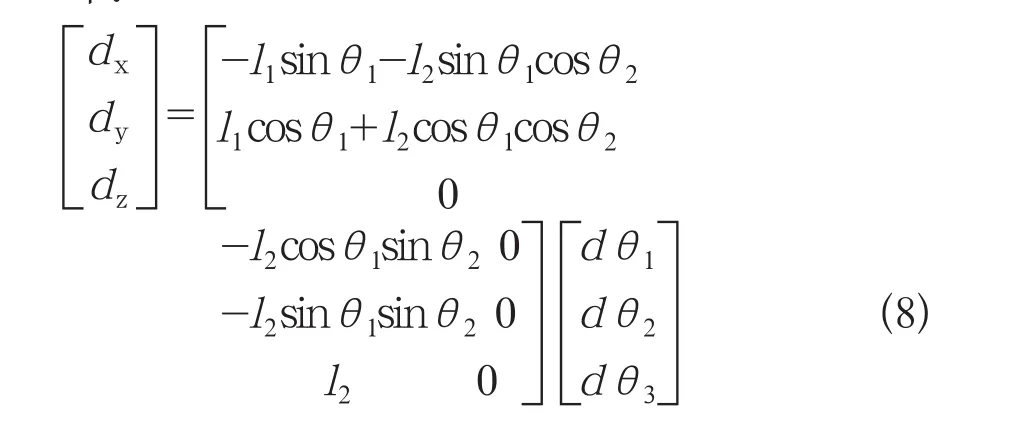
式(8)反映了驱动杆末端关节位移与前端关节之间的运动关系。对式(8)两边对di求导可得速度矢量:
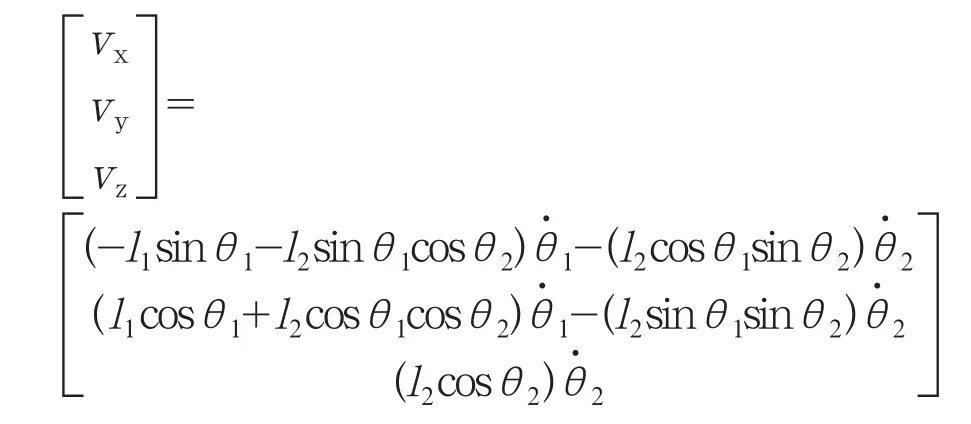
解出相应的关节速度:θ˙=J-1V。又因为雅可比矩阵J具有可逆性,故只要给定驱动杆末端的直角坐标速度,即可求得相应铰接处的速度。从上述推理中可得相应铰接处的角速度为:

角加速度为:

3 接地机构的运动学仿真分析
3.1 建立虚拟样机
由于ADAMS软件本身自带的几何建模模块不够精准和逼真,且整个样机零件较多的时候容易造成约束过多,因此根据机构运动简图,并将其中一些零件运用布尔运算简化为一个构件以提高仿真效率,仿真模型如图4所示。

图4 虚拟样机模型
在各杆的铰接处、活动夹爪与地面的铰接位置添加转动副,驱动杆的前端与地面之间添加移动副,曲柄上添加驱动并填写相应驱动函数,约束添加如表3所示。对系统的自由度、未定义重量的构件和过约束等情况进行检查,随后做静平衡分析验证模型的准确性。

表3 虚拟样机构件的约束类型
3.2 仿真分析
调用ADAMS/Solver进行仿真分析获得各构件的运动特性。设置仿真时间End time为12,步数为500,曲柄的驱动函数为30d*time,然后进行仿真。在仿真计算结束后进入后处理环境PostProcessor,绘制不同偏置距离e、不同扭簧刚度系数k和仰角φ下活动夹爪标记点的运动曲线,如图5—7所示。
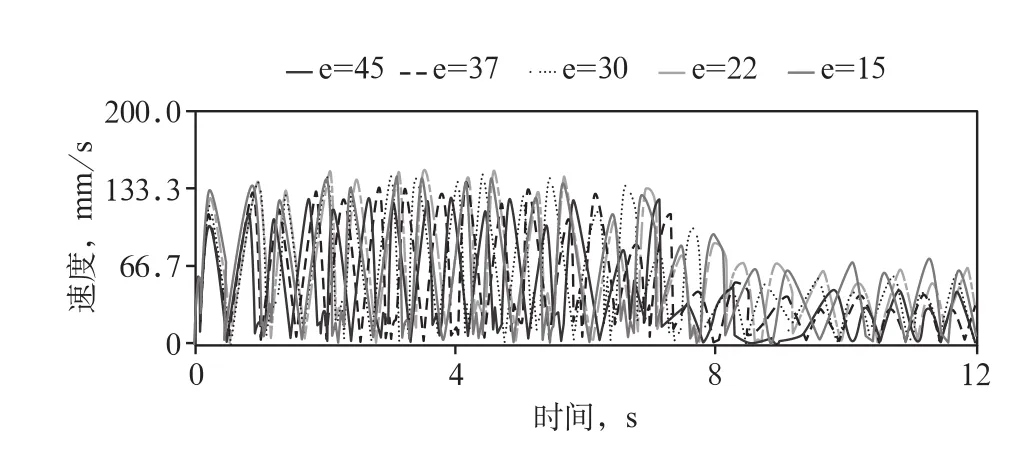
图5 不同偏距下活动夹爪标记点的速度对比分析
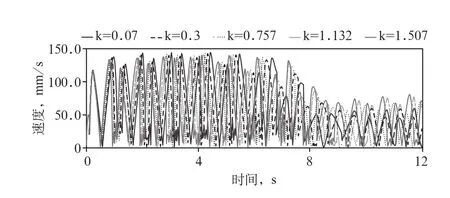
图6 不同扭簧刚度系数下活动夹爪标记点的速度对比分析

图7 活动夹爪前端铰点不同仰角下活动夹爪标记点的速度对比分析
由图5可知,无论驱动杆前端在何种偏距下活动,夹爪标记点的速度均产生了比较大的波动,但不同的偏距下活动夹爪标记点的速度变化规律不尽相同。一方面偏距减小时,标记点速度波动的幅度增大,其次发生波动的时间提前,因此活动夹爪运动的平稳性降低;另一方面偏距为15时,标记点速度波动周期明显增大,且与其他偏距下的周期错开,说明该情况下活动夹爪的平均速度降低。
由图6可知,扭簧刚度系数增大时活动夹爪标记点的运动速度变化显得 “迟钝”。增大刚度系数情况下,在前期标记点速度略低,运动更平稳;但后期标记点速度的波动幅度增加,晃动明显。
由图7可知,相比偏距和刚度系数,活动夹爪前端铰点仰角的影响更为显著。随着仰角的降低,仰角降低标记点的速度波动幅度降低,说明其平均速度不高,因此打开和闭合效率没有优势,但是动作更加平稳。
4 结论
从施工现场对接地机构提出的要求出发,提出了一种多自由度并联自锁机构,并利用D-H理论建立了机构系统的运动学模型,说明机构的执行动作在理论上具有可解性;随后根据绘制的机构简图并结合仿真研究手段,在ADAMS软件中对关键参数进行了多体运动学仿真分析,仿真结果表明如下几个观点。
(1) 无论在何种偏置距离下,活动夹爪在打开与关闭过程中均存在一定程度的速度波动,这是由机构的固有属性决定的。增加偏距,能减少速度的波动幅度,增加打开与关闭活动夹爪过程的平稳性;减少偏距则能提高机构的执行效率。
(2) 提高扭簧刚度系数不能降低活动夹爪速度的波动幅度,但对速度波动的周期影响较大。增大刚度系数时速度波动周期增大,故单位时间内的平均速度降低,活动夹爪动作时间增加。
(3) 变化的仰角对活动夹爪运动的末期影响较大,仰角降低使其运动更加平稳。
参考文献:
1 袁剑雄.六自由度并联瞄准模拟器研制[D].哈尔滨:哈尔滨工业大学,2002.
2 张晋西,郭学琴,林昌华,等.牛头刨床机构虚拟样机分析[J].机械与电子,2006,24(9):63-65.
3 王 南,郝莉红,张莉婷,等.基于ADAMS/View的双横臂独立悬架的运动学仿真分析[J].河北工业科技,2012,29(4):214-216.
4 曹 恒,牛思捷,王 瑜,等.基于ADAMS的助力机械腿结构设计与仿真[J].工程设计学报,2009,16(5):340-343.
5 李景禄,郑瑞臣.关于接地工程中若干问题的分析和探讨[J].高电压技术,2006,32(6):122-124.
6 张瑞强,何 为,李 羿,等.基于正逆问题分析方法的变电站接地网研究综述[J].中国电机工程学报,2014,34(21):3 548-3 560.
7 方秀平.基于ADAMS的平面四杆机构仿真实验平台研究[D].吉林:延边大学,2012.
8 童雪芳,董晓辉,谷定燮.特高压输电线路杆塔基础独立接地性能仿真分析[J].高电压技术,2012,38(12),3 323-3 330.
