智能立体停车库的设计研究
2018-04-20马魁男
马魁男
(吉林工商学院工学院,长春 130000)
汽车保有量逐年增加,私家车普及率越来越高。人口集中导致城市可用空间越来越少,停车难、停车慢、占道停车,停车耗能大、环保性差等问题成为社会热点。充分利用城市中狭小地区的垂直空间和智能停车系统,可以缓解繁华路段和狭窄路段的停车问题,提高停车效率。为了缓解政府交通管控压力和市民停车难题,做到秩序停车,智能立体停车场的研发应时而生。
1 电梯式智能立体停车库的结构设计
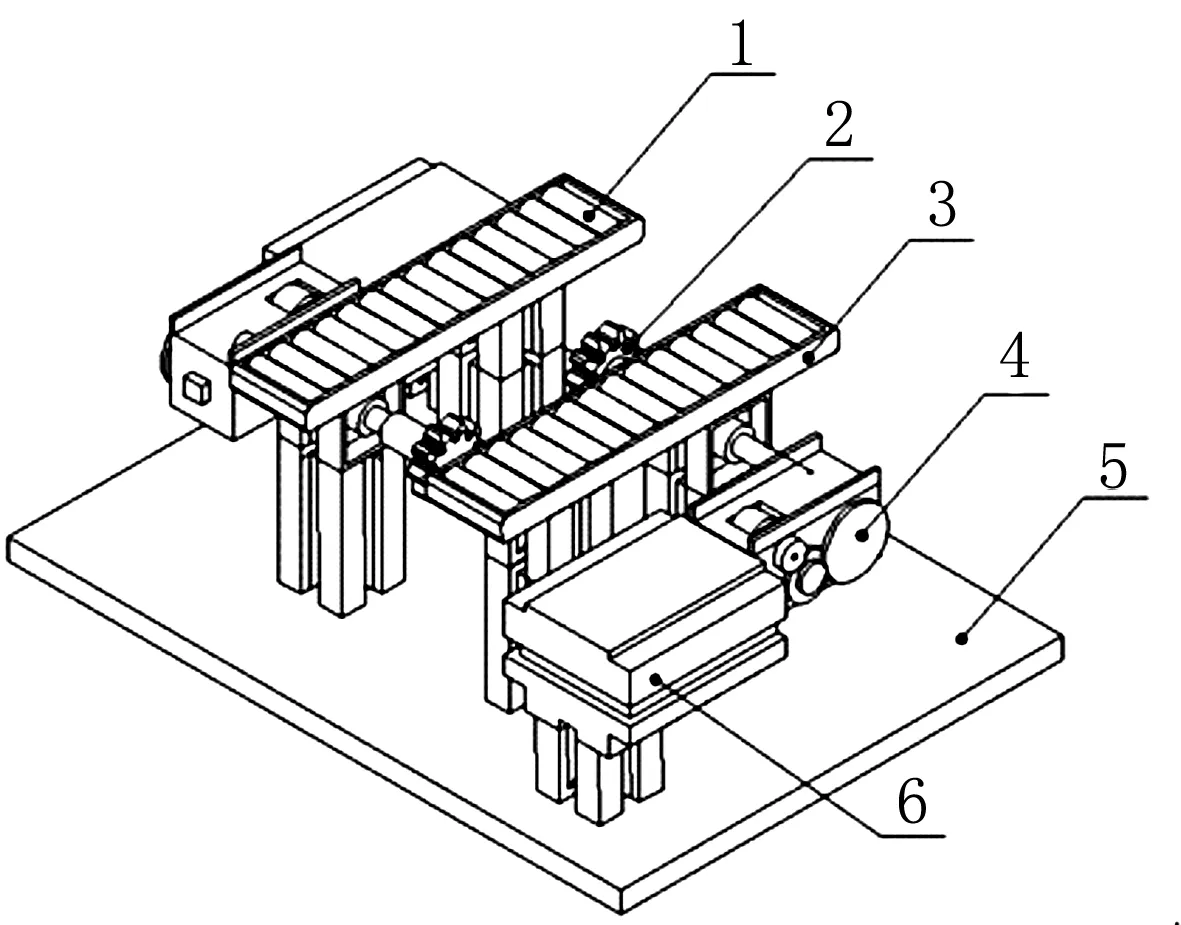
本设计充分利用垂直空间解决停车难问题。停车场框架设计结构原理基于其支撑的每层停车装置和升降装置,停车位可设置多层,停车场框架根据层数进行增高加固,每个停车层可放置两个停车装置用以自动化的智能停车,停车场框架上每个停车位入口处安装有停车动作开关K4,在停车装置上设置有限位开关K3,除此之外,停车装置和送车装置结构一致。电梯式智能立体停车库总体结构如图1所示。
停车装置位于停车位处,并固定于停车场框架上,停车装置包括停车滚子、停车齿轮、停车滚子支架、停车齿轮箱、停车底板、停车马达M2及限位开关K3。其中,停车滚子支架、停车齿轮箱及停车马达M2安装在停车底板上,停车齿轮箱的输入端与停车马达M2连接,停车齿轮箱的输出端与停车齿轮连接,停车马达M2与中央控制系统连接。停车滚子安装在停车滚子支架上。限位开关K3安装在停车滚子支架上,远离停车位入口的一端,并与中央控制系统连接。停车动作开关K4安装在每个停车位入口处的停车场框架上(如图2所示)。每个停车层设置有两个停车装置。

1.停车场框架;2.停车装置;3.送车装置; 4.载车板;5.升降装置;6.底台图1 电梯式智能立体停车库总体结构图
1.停车滚子;2.停车齿轮;3.停车滚子支架; 4.停车齿轮箱;5.停车底板;6.停车马达图2 停车装置结构示意图
升降装置固定在底台上,立柱外框支撑架与支架焊接。立柱马达及立柱丝杠安装在立柱外框支撑架上,立柱马达的输入端与中央控制系统连接,立柱马达的输出端通过传动齿轮与立柱丝杠连接。丝杠螺母安装在立柱丝杠上。立柱挡块以焊接方式固定安装在立柱丝杠上部。导向立柱安装在底台上并与底台呈垂直布置,数量为4个,每个导向立柱上部焊接有上限位挡块、下部焊接有下限位挡块。支撑滑块数量为4个,4个支撑滑块分别焊接在送车底板4个角,支撑滑块与导向立柱一一对应且滑动连接。人工交互平台与中央控制系统通信连接,人工交互平台上设置有停车开关K1及取车开关K2(如图3所示)。载车板底部焊接有齿条块(如图4所示)。
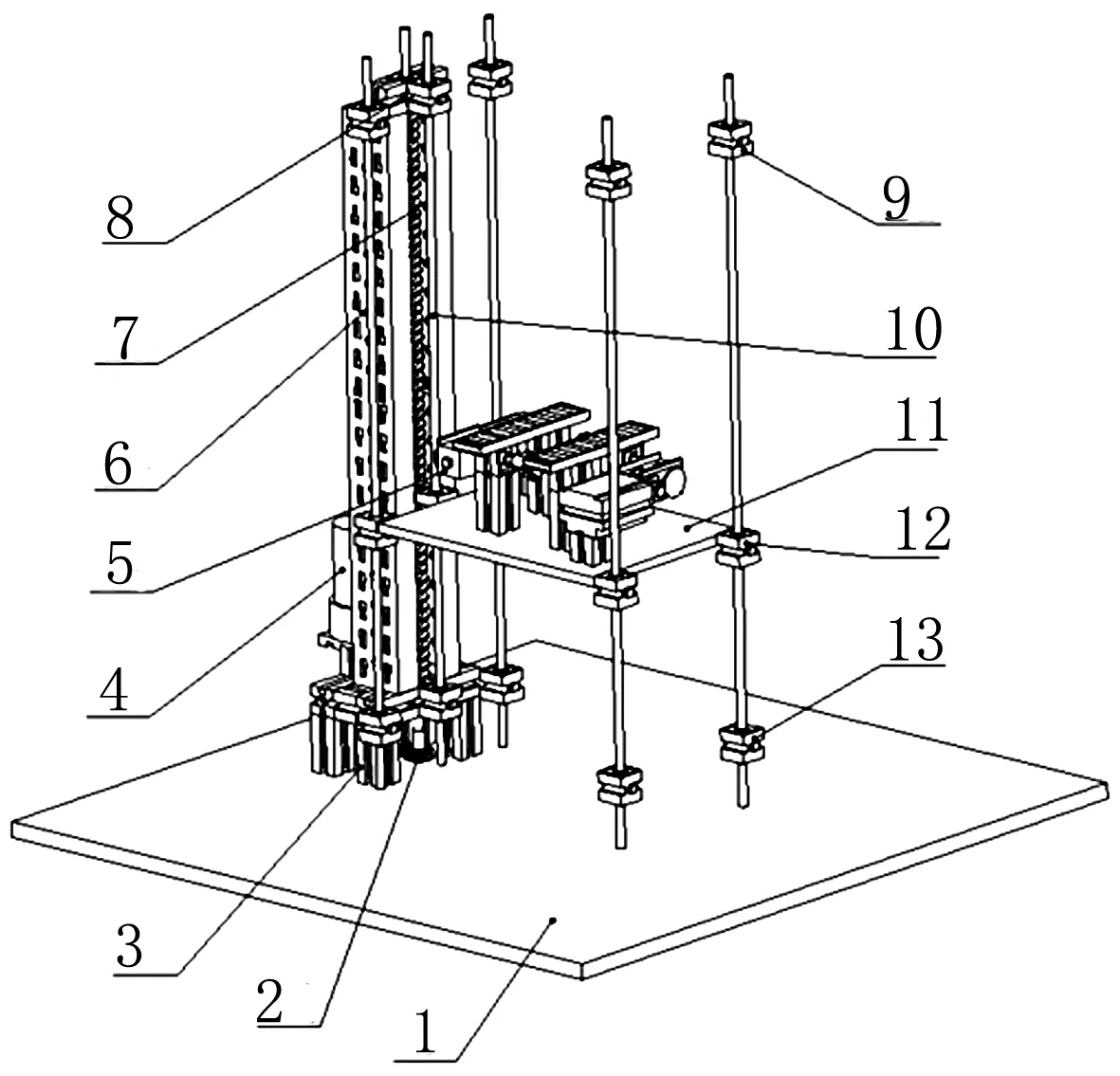
1.底台;2.升降装置包括传动齿轮;3.支架; 4.立柱马达;5.丝杠螺母;6.立柱外框支撑架; 7.立柱丝杠;8.立柱挡块;9.上限位挡块; 10.导向立柱;11.送车装置;12.支撑滑块;13.下限位挡块图3 升降装置构示意图
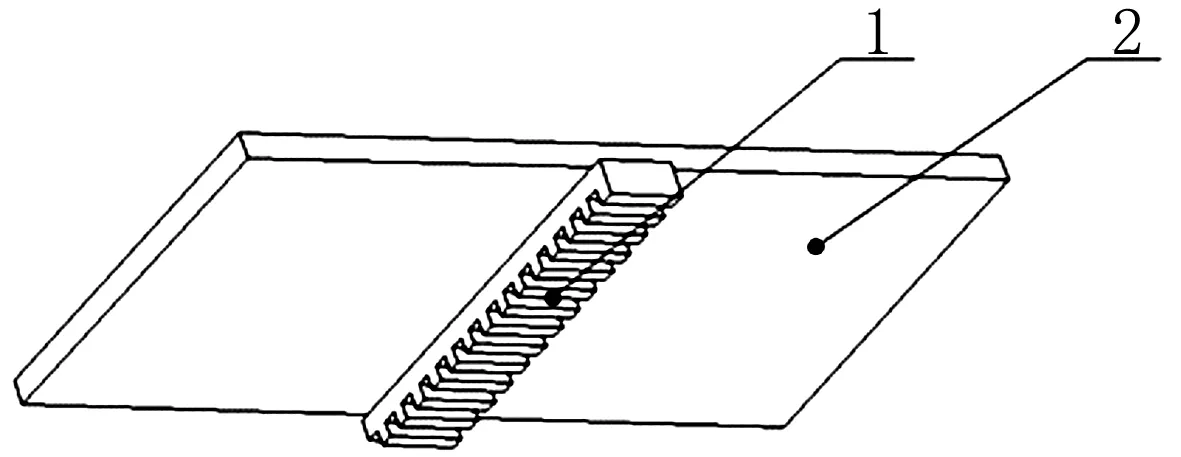
1.齿条块;2.载车板图4 载车板结构示意图
电梯式智能立体停车库整个停车过程完全由马达驱动的控制反馈给中央控制系统,停车位空置与否系统可均衡调配。每个停车位上都设有红外感应装置,即车辆感应装置K5,车辆感应装置K5与中央控制系统连接,以便中央控制系统确定车位空置与否,并根据最短路径方式安排车辆的停取。首先,驾驶员将车辆停于载车板上,驾驶员下车并启动停车开关K1,将停车信息传输至中央控制系统,中央控制系统接收停车信息并进行处理,中央控制系统将处理后的停车信息发送给立柱马达,升降装置通过立柱马达驱动将停车装置抬升至指定停车层,升降装置停稳后该停车层的停车动作开关K4被打开,该停车动作开关K4安装在每一个停车位入口处停车场框架上,停车动作开关K4为感应式开关,送车装置上的两个送车马达同时开始工作,送车齿轮旋转推动齿条块和其上的载车板向停车装置移动,载车板移动到停车装置上后齿条块会与送车装置上的送车齿轮脱离,此时,停车装置上的两个停车马达同时启动,通过停车齿轮、齿条块的配合,承接载车板的移动任务,载车板移动至指定停车位置后触碰限位开关K3,所述限位开关K3安装在停车滚子支架上远离停车位入口的一端,限位开关K3与中央控制系统连接,限位开关K3为触碰式开关,停车马达停止工作,载车板停止移动,车辆停稳后中央控制系统控制停车装置升降至空置停车位处,承接该处载车板后回位到初始位置,进行下一辆车的停放操作。取车动作则相反,由停车装置将载车板推送至送车装置,升降装置带动送车装置下降到初始位置。
2 电梯式智能立体停车库控制原理分析
如图5所示本设计中的一层取车系统工作过程为:驾驶员按下取车开关K2,升降装置无需工作,故此时立柱马达M1不工作,送车装置触碰一层停车场框架上停车动作开关K4,停车马达开始反转,载车板和其上的车辆被反向推向送车装置,10 s后载车板即将离开停车装置,送车马达开始反转,载车板脱离限位开关K3,30 s后到指定送车位置,送车马达和停车马达停止工作,一层取车过程结束,升降装置无需回位动作,立柱马达M1依然停转。

图5 一层停取车控制原理图
如图6所示,本发明中的二层及以上停车系统工作过程为:驾驶员按下停车开关K1,立柱马达开始工作,抬升升降装置至指定停车层,送车装置触碰该层停车场框架上的停车动作开关K4,送车马达开始正转,载车板被推送向停车装置,10 s后载车板即将离开送车装置,停车马达开始正转,载车板在停车装置上向内移动直至最里侧停车位,此时碰触到限位开关K3,送车马达和停车马达M2停止工作,该层停车过程结束,立柱马达反转,直至升降装置回降到初始位置。
本设计中的二层及以上取车系统工作过程为:驾驶员按下取车开关K2,立柱马达开始工作,抬升升降装置至取车层,送车装置触碰该层停车场框架上的停车动作开关K4,停车马达开始反转,载车板和其上的车辆被反向推向送车装置,10 s后载车板即将离开停车装置,送车马达M3开始反转,载车板脱离限位开关K3,30 s后到指定送车位置,送车马达和停车马达停止工作,该层取车过程结束,立柱马达反转,直至升降装置回降到驾驶员等待位置。

图6 二层停取车控制原理图
3 电梯式智能立体停车库控制系统设计
根据前述设计情况,停车场控制系统由车辆停入系统、车位监测系统、车辆取出即收费系统组成。其中,车位监测系统可根据停车位的数量,分区域分别设置微处理器进行控制,各区分处理器采用串行接口与主机相连,如图7所示。

图7 控制系统框图
3.1 车辆停取控制系统设计
由于停车过程为驾驶员将车辆停入送车装置,驾驶员下车到指定位置按下停车按钮,取走停车卡,系统记录该卡所属车辆停车位置以便准确取车,故需要配备RFID读写模块。停车时间由时间模块来记录。各个电机要配备驱动电路。最终由微处理器控制各个模块间的换算和运行(如图8所示)。
本设计中多机通讯选取51系列单片机且组成结构为主从式,每个模块分配一个单片机进行控制。选用RS-485串口通讯。为了配合RFID模块的串口通讯19.5 kbps的波特率,单片机选取串口通讯方式配合连接。

图8 停入系统框图
为了简化程序、提高系统运行效率,本设计采用自定义通讯协议,具体工作情况如下:1)从机只完成指定模块的工作任务,无需主动访问主机。2)主机只发送地址信息给从机,从机通过第9位接收的数据是否为9来判断该数据是否为主机发送的地址信息。其他情况则为从其他途径接收到的数据信息。3)主机驱动从机时,先以广播地址形式中断所有从机接收状态,从机一一核对,地址匹配从机发送数据给主机,其他从机结束中断返回。
3.2 车位监测控制系统设计
为了快速便捷地寻找空车位,系统给每个车位进行编号,并且在车位多的情况下进行分区管理。本设计每30个车位为一个分区,每个分区设定区域编号。该区域车位停满时反馈给系统为1,同时,系统点亮相应区域LED红灯;未满时为0,同时,系统点亮相应区域LED绿灯。
停车位从机软件控制流程为:系统初始化后,各车位红外感应器逐一反馈车位有无车情况,系统作以记录,有车为1无车为0。每30个车位对应一个分区编号进行反馈记录。如果在反馈期间出现停取车等串口中断信号,则中断该反馈,执行完中断程序后返回继续。如图9所示。

图9 停车位从机软件控制流程
4 结语
通过上述设计方案,本设计提供的电梯式智能立体停车库,充分利用了垂直空间,适用于中型停车场的设计,对城市中心小区域空间的充分利用具有积极意义,智能的控制方式和多车位的设计更应急解决了快速停车和停车难的问题。
[1] 贾登政.户外上横移式智能立体停车场:中国,201720585079.8[P].2017-12-22.
[2] 李春雷.立体车库载车控制策略及仿真技术研究[D].唐山:华北理工大学,2016.
[3]王新,李春雷.智能立体车库存取车模式研究分析[J].机械工程与自动化,2017(3):32-35.
[4] 李亚坤.别墅半地下车库前穿越式智能车库的设计与研究[D].郑州:郑州大学 ,2017.
[5] 程子健,赵永强.机械式智能立体车库的创新设计[J].内燃机与配件,2017(23):1-2.
