基于RT-LAB的高压配电逻辑实时仿真研究与实现
2018-04-18杨会敏宋志鹏
王 清,赵 芳, 杨会敏,宋志鹏
(中国中车永济电机公司, 陕西 西安 710016)
引言
一套高压配电系统的软硬件设计完成后,为了保证实际装置及软件程序的可行性和可靠性,通过半实物仿真试验验证是必不可少的。近年来,仿真技术以其经济性、可控性和安全性等特点得到了广泛应用,以Matlab为代表的众多仿真软件使数字仿真技术进入到一个崭新的阶段[1]。Simulink是Matlab的一个工具箱,它不需用户过多地了解数值问题,而是侧重于系统的建模、分析与设计问题,其模块化的结构及良好的人机界面再一次把数字仿真技术推向了一个新的高度。然而遗憾的是,Simulink却没有与硬件I/O的接口,不支持实时仿真。针对该软件的不足,进行实时仿真就成为了解决该问题的突破口[2]。
加拿大Opal-RT公司开发的RT-LAB实时仿真平台,它可以实现Matlab/Simulink的无缝连接。RT-LAB最大的特点是其开放性和可扩展性,它可以兼容标准的商业I/O板卡和PC处理器,从而降低了系统设计的成本,提高了集成性和扩展性[3]。
RT-LAB是一个分布式实时平台,它能够在很短的时间内,以较低的花费,通过进行工程仿真或者是对实物在回路的实时系统建立动态模型,使得工程系统的设计过程变得更加简单。RT-LAB的可测试性使得开发者能够把计算机使用到任何需要应用的地方;其应用的灵活性使它能够应用于解决最复杂的仿真和控制问题,目前,它已经成功应用于硬件在回路实时仿真测试或者快速原型的开发、控制与测试领域[4]。
本文利用RT-LAB平台搭建了一套某车型高压配电系统的半实物仿真测试系统,完成了高压配电设备逻辑时序控制测试,该系统由受电弓(受电弓故障工况下由车间电源或蓄电池电源替代)连接一套高压配电设备,直流高压经过高压配电设备后,分别给车载空调和两套变流器供电,实现两套变流器及车载空调的高压配电。高压配电内部设备主要包含断路器、接触器、熔断器等。高压设备连接两套变流器,两套变流器分别控制两台电机,两套变流器可以完全独立工作。
1 半实物仿真硬件平台搭建
在半实物仿真测试系统中,牵引控制单元(TCU)为真实设备,搭建高压配电系统的拓扑、数字输入量、数字输出量和模拟量输出等模型运行在仿真机中。半实物仿真硬件平台主要包括:1台上位机、1台RT-LAB仿真机和2台牵引控制单元(TCU)及录波仪。其中仿真机的作用为:一是模拟牵引控制单元的控制对象,在本文中主要为断路器、接触器的通断信号。二是模拟司机室发出的控制指令给TCU,TCU中内嵌控制程序,主要作用是响应司机室发出的控制指令,并对被控对象进行控制。下页图1和图2分别为半实物仿真硬件平台框图及实物图。
本文搭建的半实物仿真平台主要实现牵引系统高压配电逻辑的测试。仿真机中的CPU模拟司机控制室,给TCU发送控制指令,并通过上位机界面监测状态反馈信号;OP5330为模拟量输出板卡,其主要作用是从系统逻辑测试模型中采集模拟量输出给两台TCU参与控制;OP5353为数字量输入板卡,当TCU收到司机室发出的指令后,通过OP5353板卡向系统逻辑测试模型发送指令,用于控制接触器、断路器通断;OP5354为数字量输出板卡,TCU发送指令给系统主电路,主电路通过OP5354发送状态反馈量给TCU参与控制。系统中所有的控制指令和状态反馈量都可通过录波器进行全程实时监控和记录。
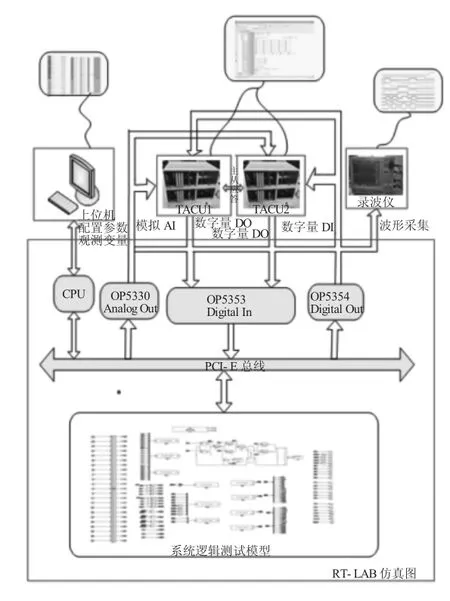
图1 半实物仿真硬件平台框图

图2 半实物仿真硬件平台实物图
2 系统逻辑软件流程及测试结果分析
图3给出了测试过程中的具体操作流程。图中上电流程参照高压配电设备接触器物理位置。首先上电自检,包括模拟量、数字量、状态量采样是否都正常;系统自检通过后,选择主控车(本文中选择TCU2为主控车,TCU1为从控车),系统同时只允许一个TCU做为主控车;选择主控车后才可以选择供电方式,供电方式包括电网供电、车间电源供电和蓄电池供电,并且同时只允许选择一种供电方式。当前供电方式故障时,可以切换为另外两种供电方式;选择供电方式后,检查系统中相关的接触器动作和状态反馈正常后,确认电源配电成功;最后就可以控制相应的变流器进行牵引制动等工况的运行。
图4是根据图3的流程,采集的12路接触器、开关、状态反馈量的时序图。
1)为了确保系统初始状态的正确性,在高压配电系统启动之前需要系统自检,软件设置为降弓到位信号置1,即P=1,确定弓网是降弓状态。
2)自检完成后,首先让降弓到位信号置0,即P=0,为升弓状态。然后司机室给出主从选择信号,本文中选择TCU2为主机,TCU1为从机,相应的指令信号状态为Z1=0,Z2=1。
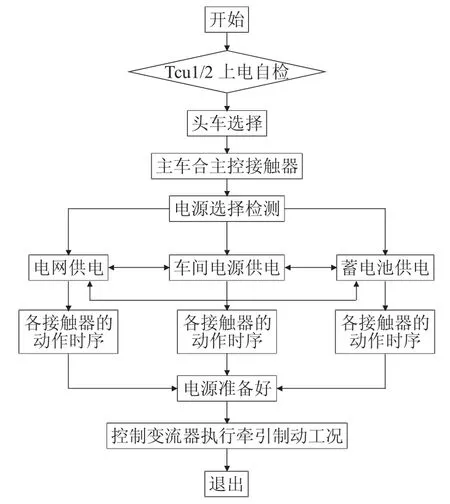
图3 测试操作流程图
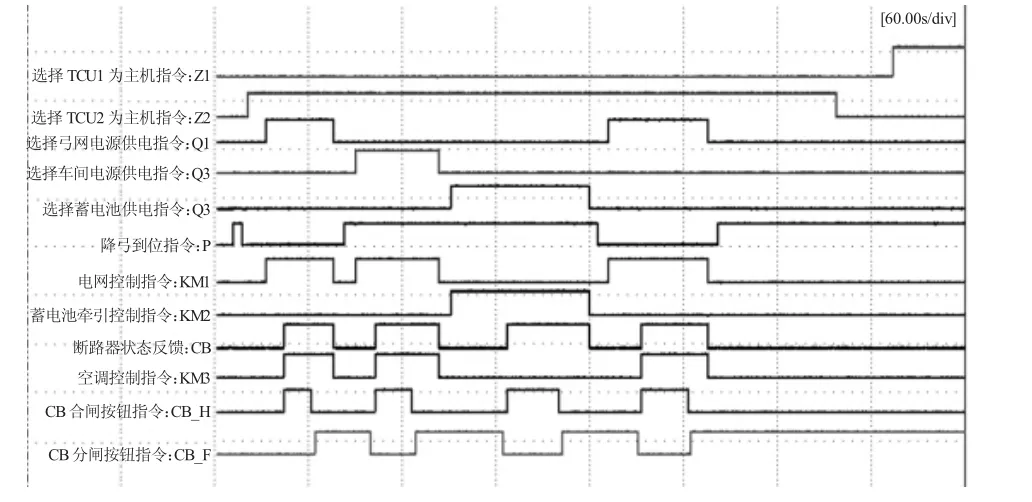
图4 接触器动作时序波形图
3)高压配电系统有3种供电方式,分别为弓网供电,车间电源供电和蓄电池供电。系统启动后,只能选择一种供电方式。只有在当前供电电源故障或者司机室操作选择另外两种供电电源时,才能被切换。本文中首先选择弓网供电方式,司机室发送选择弓网供电指令Q1=1,TCU给高压系统发送电网控制指令KM1=1,司机室发送断路器合闸按钮指令CB_H=1后,相应的断路器状态反馈CB=1,空调控制指令KM3=1。此时,高压配电系统在弓网供电情况下完成配电功能。
4)当弓网供电电源故障或者司机室操作选择车间电源供电方式,先让CB_H合闸按钮清0,相应CB_F分闸按钮置1,断弓网供电Q1=0,待降弓到位信号P为1时,切换为车间电源Q2=1;当车间电源供电被选择后,判断降弓到位信号P是否为1,若是,相应KM1动作、待CB_H合闸按钮选通后,进行CB动作、KM3动作。此时,高压配电系统在车间电源供电情况下完成配电功能。
5)车间电源切换为蓄电池供电:首先CB_H合闸按钮清0,相应CB_F分闸按钮置1,断车间电源供电Q2=0,切换为蓄电池供电电源Q3=1;当蓄电池供电被选择后,判断降弓到位信号P是否为1,若是,相应蓄电池牵引控制指令KM2动作,待CB_H合闸按钮选通后再进行CB动作。此时,高压配电系统在蓄电池电源供电情况下完成配电功能。
6)蓄电池切换弓网供电:首先CB_H合闸按钮清零,相应CB_F分闸按钮置1,断蓄电池供电Q3=0,切换为弓网供电Q1=1,按步骤3进行。
7)主从互换:先让CB_H合闸按钮清零,相应CB_F分闸按钮置1,断弓网供电Q1=0,令Z2=0,Z1=1,此时TCU1为主机,TCU2为从机。
通过对上页图4时序波形图分析,系统完全按照上页图3所示流程程序代码实现。通过RT-LAB半实物仿真测试,实现了高压配电设备逻辑测试验证并达到预期的要求。
3 结语
本文所搭建的牵引系统高压配电逻辑半实物仿真模型,以及所设计的逻辑控制算法在RT-LAB半实物仿真平台和牵引控制单元(TCU)中能正确运行。实验结果表明,系统逻辑时序完全按照程序算法设定的目标实现,验证了TCU程序中设计的逻辑时序的正确性,为后续系统在现场试验起到关键的指导作用,同时缩短及降低了试验周期和成本。
[1]单家元,丁艳.半实物仿真[M].北京:国防工业出版社,2008.
[2]上海科粱公司.实时分布式仿真与测试[Z].上海:上海科梁科技发展有限公司,2004.
[3]薛定宇,陈阳泉.基于Matlab/simulink的系统仿真技术与应用[M].北京:清华大学出版社,2001.
[4]常晓飞,符文星,闰杰.RT-LAB在半实物仿真系统中的应用研究[J].测控技术,2008,27(10):75-78.
