基于三维虚拟视觉的室内设计平台研究
2018-04-13廖坤
廖坤
摘 要: 现有的室内设计平台只能根据景观所处位置绘制室内设计平面图像。在现有研究基础上,根据室内景观所处位置,生成真实、立体图像,设计基于三维虚拟视觉的室内设计平台。通过分析三维虚拟视角下,室内设计平台结构、室内定位算法,完成室内设计需求分析;通过完善室内设计平台交互功能、设计平台锚节点和驱动程序,完成基于三维虚拟视觉的室内设计平台搭建。模拟平台使用环境设计对比实验,结果表明,应用基于三维虚拟视觉的室内设计平台,能绘制室内设计平面图像和立体图像,且图像中室内景观所处位置更符合实际需求。
关键词: 三维虚拟视觉; 室内设计; 定位算法; 交互功能; 锚节点; 驱动程序; 立体图像
中图分类号: TN911.73?34; TP393 文献标识码: A 文章编号: 1004?373X(2018)08?0180?03
Abstract: The existing interior design platform can only draw plane images of interior design according to the position of the landscape. On the basis of the existing research and to generate real and stereo images according to the position of the indoor landscape, an interior design platform based on 3D virtual vision is designed. Demand analysis of interior design is accomplished by analyzing the platform structure of interior design and indoor positioning algorithm under the 3D virtual view. The establishment of interior design platform based on 3D virtual vision is accomplished by improving the interactive function of interior design platform and designing anchor nodes and drive program of the platform. The contrast experiment was designed by simulating the operating environment of the platform. The results show that the interior design platform based on 3D virtual vision can draw plane images and stereo images of interior design, and the position of indoor landscape in images better conforms to the actual needs.
Keywords: 3D virtual vision; interior design; positioning algorithm; interactive function; anchor node; drive program; stereo image
0 引 言
當室内环境较为简单、面积较小时,传统设计平台绘制出的平面图像可表示室内景观的真实位置。若室内环境过于复杂、面积很大时,平面图像不能确切表示景观的真实位置,不能绘制立体图像,成为传统室内设计平台的弊端[1]。为了有效改善这种情况,引入三维虚拟视觉技术。三维虚拟视觉技术,利用相机360°环拍原理,详细记录室内景观真实情况,再通过特定的计算机技术,将景观真实情况进行还原[2]。结合三维虚拟视觉技术,对原有室内设计平台进行改进。通过全景信息记录、信息数字化分析、分析结果拼接、生成图像的工作流程,搭建全新的室内设计平台。改进后的室内设计平台既可以绘制传统平面图像,也可以适应大型室内环境,生成立体景观图像,且生成图像中,景观所处的具体位置更贴合实际使用需求。
1 三维虚拟视觉技术下室内设计需求分析
1.1 三维虚拟视角下室内设计平台结构
三维虚拟视角下室内设计平台,由交互模块、三维虚拟视觉效果展示模块、交互性展示模块三大部分组成。其中,交互模块实现中心计算机对室内景观的位置确定[3?4]。在此过程中,中心计算机对室内景观进行定义、命名,根据重定义后景观的程序命名,设定相关的关联参数。三维虚拟视觉效果展示模块,能确保平台使用者可以随机调控观察点,全面了解室内景观的位置特点。交互性展示模块对前两模块确定的室内景观信息进行处理,并根据处理结果,选择不同室内景观间的交互方式[5]。具体平台设计结构如图1所示。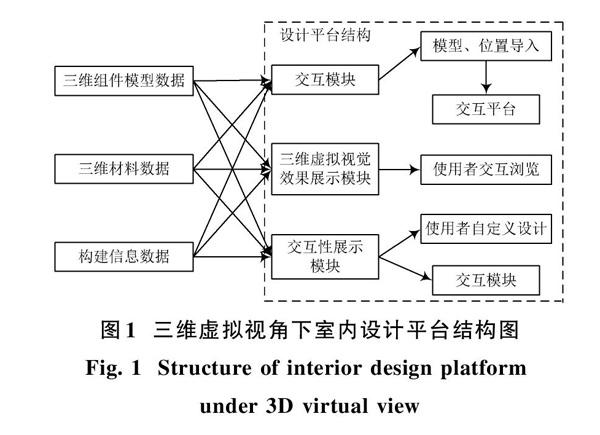
1.2 室内定位算法
1.2.1 信号到达室内景观时间
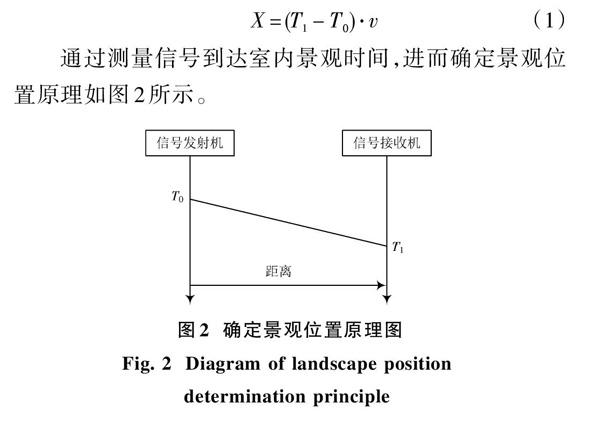
在三维虚拟视角下,获得信号到达室内景观时间,进而确定景观具体位置[6]。首先,取一台已知传输速率的信号发射机,获取信号从发射机传输至接收机的时间。根据位移、速度、时间三者间关系[7],确定发射机、接收机间距离,这也是常用TOA定位算法的延伸体现。设无线信号在介质中的传播速度表示为[v],发射机与接收机间处于同一水平线,二者间距离为[X],发射机发出信号时间为[T0],接收机接收信号时间为[T1],则[X]可表示为:
1.2.2 信号到达时间差
当信号发射机与信号接收机间距离过远时,单独的信号不足以判断二者间距离[8]。在此种情况下,需要发射两种信号,根据接收机接收两种信号的时间差值,确定二者间的距离[9]。设两种信号在介质中的传播速度分别为[v]和[v′],发射机与接收机间距离为[X′],接收机接收到第一种信号的时间为[T1],接收到第二种信号的时间为[T2],则[X]可表示为: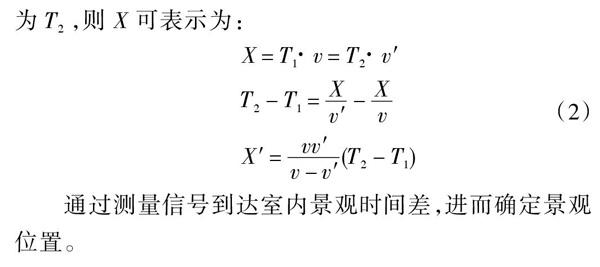
2 基于三维虚拟视觉室内设计平台的搭建
2.1 基于三维虚拟视觉室内设计平台的交互功能
三维虚拟视觉技术作为室内设计平台新的互动方式,确保设计者可直接获得室内景观的真实位置,其具体实现方式如图3所示。
其中三维视觉虚拟模型采集交互景观的虚拟视觉数据,分析景观之间的映射关系,通过3ds MAX等软件,建立室内景观设计的三维虚拟模型。景观位置确定是交互功能平台的重要部分,可通过对景观位置的确定,为设计者提供最直观的设计信息[10]。交互功能设计,完成交互动作设计后,对室内其他景观进行交互功能设计,确保景观的旋转、缩放功能可以正常实现。平台应用将完成交互功能的平台,与室内景观模型融为一体,为设计者提供最准确的室内景观设计信息。
2.2 基于三维虚拟视觉室内设计平台锚节点设计
平台锚节点负责发射WiFi,ZigBee两种无线信号,电源转换及开关电路,为WiFi模块和ZigBee模块提供无线信号,复位电路为两个模块提供所需供电。具体锚节点设计结构如图4所示。
其中WiFi模块和ZigBee模块只需接收供电即可,省去Debug结构的储能工序,减少能源的浪费。
2.3 平台驱动程序设计
基于三维虚拟视觉室内设计平台驱动程序,包括WiFi模块程序和ZigBee节点程序。其中WiFi模块程序建立在三维虚拟lua脚本语言基础上,对原有C语言操作系统进行重新编译。三维虚拟lua脚本语言具有小巧灵活、便于在程序中进行嵌套操作等特点。应用三维虚拟lua脚本语言,不仅省去了室内设计平台操作必须的强大应用库,也很大程度上解放了API的开发功能,为使用基于三维虚拟视觉室内设计平台带来更大的便利[11]。图5展示了以通信节点为例,WiFi模块的工作流程。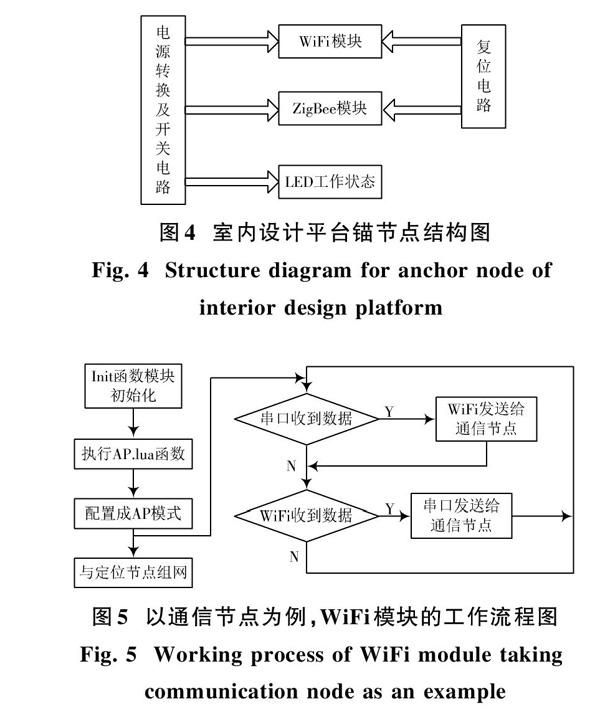
3 实验结果與分析
实验参数设置表如表1所示。
上述过程完成了基于三维虚拟视觉室内设计平台的搭建,为验证该平台与普通平台的优越性,实验开始前,对搭载两种平台的计算机相关实验参数进行设置。
3.1 实验参数设置
项目栏从上至下依次为处理器主频、总线数量、图像存储量、平台稳定等级、预计成图时间、图像大小。其中平台稳定等级为Ⅴ级,代表平台稳定性极高;图像大小为本次实验规定。为了保证实验的公平性,实验组与对照组参数设定均保持一致。
3.2 室内设计立体图像绘制对比
完成平面图像绘制后,令两组计算机同时停止工作,休息10 min后,再同时开始绘制室内设计立体图像。绘制室内设计立体图像水平,依靠RYS指标判断。通常情况下,RYS指标变化幅度越小,代表绘制室内设计立体图像水平越高,若RYS指标变化幅度超过限定范围,可认为待检测平台不具备绘制室内设计立体图像能力。本阶段实验不对时间进行控制,具体实验结果见图6。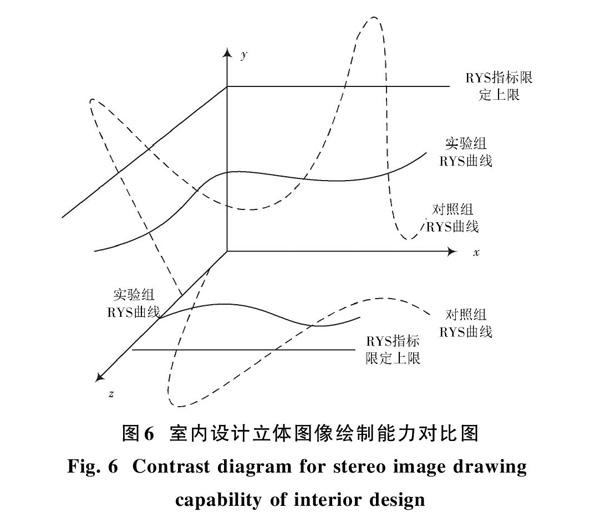
图6中与坐标轴平行的实线为RYS指标的限定上限,实曲线为实验组RYS指标曲线;虚曲线为对照组RYS指标曲线。由图6可知,实验组RYS指标变化幅度较小,绘制室内设计立体图像水平越高。对照组RYS指标变化幅度极大,且部分曲线超过RYS指标的限定范围,可证明普通室内设计平台不具备设计立体图像能力。
4 结 语
基于三维虚拟视觉的室内设计平台,与普通室内设计平台相比,不论绘制平面图像还是立体图像,均具备极高的参考价值。因此,值得大力推广。
参考文献
[1] LI Yirong, ZHOU Jihe, WANG Qingyue, et al. Analysis of Enqvist and Moya′s tennis serve technique based on virtual reality technology [J]. Journal of Chengdu Technological University, 2015, 17(2): 74?77.
[2] LUO Lufeng, ZOU Xiangjun, CHENG Tangcan, et al. Design of virtual test system based on hardware?in?loop for picking robot vision localization and behavior control [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(4): 39?46.
[3] CHEN Liang, XIONG Jian, GUO Fengxiang, et al. Image calibration method of driving simulator based on vision and cognition [J]. China journal of highway and transport, 2017, 30(1):129?135.
[4] HONG Zhiguo, WANG Yongbin, SHI Minyong. Development of binocular stereo vision principle?based software of automatically creating stereoscopic videos [J]. Journal of Communication University of China (Science and technology), 2016, 23(3): 12?16.
[5] CHEN Baohua, DENG Lei, CHEN Zhixiang, et al. Instant dense 3D reconstruction?based UAV vision localization [J]. Acta electronica sinica, 2017, 45(6): 1294?1300.
[6] GUO Weiqing, TANG Yiping, LU Shaohui, et al. Review of 3D stereo vision measure and reconstruction based on mirror image [J]. Computer science, 2016, 43(9): 1?10.
[7] LUO Peng, ZHANG Yi, LIU Xiaolin, et al. Evaluation of different histochemical staining in three?dimensional reconstruction of peripheral nerves [J]. Journal of clinical medicine in practice, 2017, 21(7): 59?63.
[8] LI Taotao, FANG Xiongbing, LIN Rui, et al. 3D virtual human rapid modeling method based on top?down modeling mechanism [J]. Chinese journal of ship research, 2017, 12(1): 38?44.
[9] LIU Maohua, XIAO Jianyu, LIU Bailiang. Study on design method of road alignment in 3D virtual scene [J]. China sciencepaper, 2017, 12(3): 332?335.
[10] LU Guangsong, GAN Huibing, ZHENG Hengchi, et al. Virtual reality design of compressed air system based on 3D unity [J]. Computer measurement &; control, 2016, 24(9): 267?269.
[11] SONG Xuehui, WANG Shaorong, LAI Shunnan, et al. A network scheduling strategy of Android?based virtual reality system [J]. Computer aided drafting, design and manufacturing, 2015, 25(2): 36?42.
