基于微粒群优化算法的直流电机控制系统研究
2018-04-13刘海波杨战旗艾永乐
刘海波 杨战旗 艾永乐
摘 要: 针对现有直流电动机控制系统的特点和存在的问题,介绍以STM32单片机为控制核心的直流电机数字调速控制系统。该系统利用PWM信号驱动控制直流电机,将模糊控制与微粒群算法相结合,优化模糊控制器的参数,实现直流电机的驱动和闭环调速控制。实验结果表明,该控制系统结构简单、调速性能好,并具有较强的抗干扰能力,在工程应用中有较高的推广价值。
关健词: 直流电机; STM32; 模糊控制; 微粒群优化算法; PWM信号; 闭环调速
中图分类号: TN964?34; TP273 文献标识码: A 文章编号: 1004?373X(2018)08?0121?04
Abstract: In allusion to the characteristics and problems of the current DC motor control system, a DC motor digital speed regulation control system taking STM32 single chip microcomputer as the control core is introduced. In the system, PWM signals are used to drive and control the DC motor, fuzzy control is combined with the particle swarm optimization algorithm to optimize the parameters of fuzzy controller and realize the drive of DC motor and closed?loop speed regulation control. The experimental results show that the control system has a simple structure, good speed regulation performance, and strong anti?interference capability, which has a high promotional value in engineering application.
Keywords: DC motor; STM32; fuzzy control; particle swarm optimization algorithm; PWM signal; closed?loop speed regulation
当今,自动调控系统已经在各行各业得到了广泛的应用和发展。直流电动机因其控制性能好、方法简单、成本低和能够较大范围平滑调速等优点,在电气传动领域占据着十分重要的地位[1]。随着微电子技术和计算机技术的发展,以单片机为控制核心的数字直流调速系统控制方法灵活便捷,测速精度高,抗干扰能力强,能达到最优控制效果。本系统以STM32单片机为控制核心,利用PWM信号驱动控制直流电机,结合电流传感器实现转速电流双闭环直流数字调速系统。
1 硬件设计
1.1 基本结构
调速系统主要由主控模块、整流电路模块、电机驱动及保护模块、电压电流检测模块、人机交互模块和电源模块等组成,系统整体设计框图如图1所示。
数字调速系统采用STM32单片机作为主控制器,根据设定转速,利用转速测量模块检测转速信号并将其转变为电信号反馈给单片机;系统根据设定转速和反馈转速信号的偏差,经速度调节后产生电流参考量,它与电流反馈量形成的偏差经电流调节后,利用微粒群算法优化模糊控制器,在线自动调节模糊控制器的参数,得到PWM占空比的控制量,即改变直流电机电枢两端的平均电压调节转速,实现基于STM32单片机的直流电机转速电流双闭环调速,提高系统的性能和稳定性。
1.2 主控制器
调速装置的主控制器模块采用高性能、低功耗的STM32F103C8T6单片机,它是ARM公司最新生产的基于Cortex?M3 内核的32 位微处理器,时钟频率最高可达72 MHz,具有单周期乘法制定的硬件触发功能和较强的运算能力[2]。它提供了高级的中断响应系统和片上资源,并设有电机的专门接口,可以实现6路可配置的PWM信号,结合定时器较强的边沿捕获能力,为实现电动机的精确控制调速提供了保障。
1.3 驱动及保护电路
驱动及保护电路模块主要完成开关管的开通和关断控制,进而实现电机的调速控制。通过电流检测模块实时检测电机电流,当检测到电机过载时,主控芯片关闭PWM输出信号,实现对电机保护。考虑到电机控制过程中存在的各种情况,要求驱动模块应具有脱机、使能、锁定等功能[3?4]。
系统采用集成IR2130芯片设计驱动及保护电路,其电路原理图如图2所示。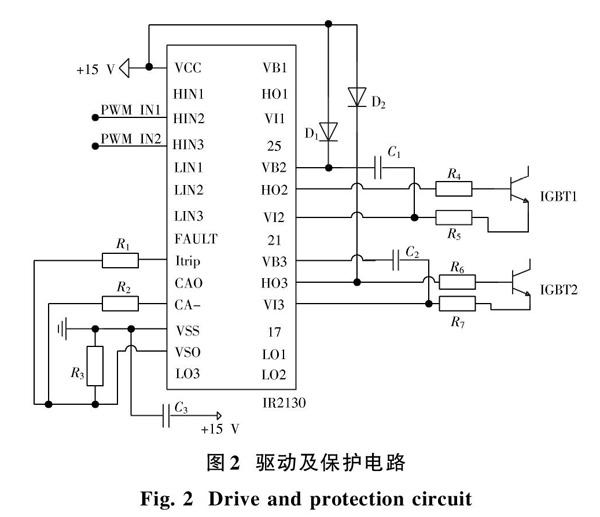
1.4 隔離电路设计
考虑到系统的抗干扰性能,接口需要考虑采用光电隔离等措施。隔离电路以快速光电隔离器件6N137为核心进行设计,光电隔离电路原理图如图3所示。其主要功能是隔离驱动电路和STM32控制电路,以防止大电流反馈到控制电路,烧坏控制芯片[5]。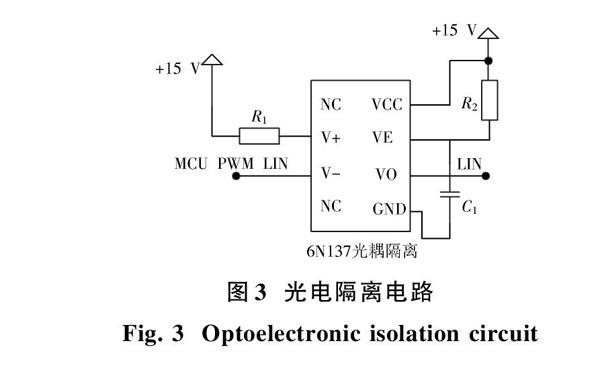
1.5 电压电流检测电路设计
电机的电压和电流分别通过VSM025A电压传感器、CSM005A电流传感器测量,它们是应用霍尔效应闭环原理的传感器,能在电隔离条件下测量直流、交流、脉冲以及各种不规则波形的电压和电流。电压传感器可以测量10~500 V电压,电流传感器可以测量0~±6 A电流。其中采样电阻必须选用精密电阻,不会因外界和自身的温度变化而发生变化,否则会影响电压电流检测的准确性。电压和电流检测电路分别如图4、图5所示。
1.6 人机交互模块
人机交互模块主要包括液晶显示电路和键盘控制,显示电路采用OLED显示屏,主要完成电机转速、电机的电压和电流、脉冲占空比等参数的显示。键盘控制采用独立按键输入方式,可实现电机的转速调整、占空比的控制等功能。
2 系统控制方法设计
直流电机的调速主要是通过调节电枢电压来实现的。其中应用比较广泛的是传统的PID控制。为了提高系统的性能,需要确定最佳的PID参数,但目前主要还是靠“试凑法”来获取,效率低、适应性差,时常造成调速系统的工作性能不佳[6]。很多学者将模糊控制与PID算法相结合进行直流电机的控制,在一定程度上解决了传统PID控制的问题,但模糊控制的规则是靠专家的知识积累和现场经验制定的,由于人员的差别会使控制系统存在缺陷,影响调速系统的性能[7]。针对这种情况,本文提出一种新的控制方法,将模糊控制和微粒群算法相结合,利用微粒群优化算法对模糊控制器的参数进行在线调节,实现系统调速参数的优化,提高系统的静态和动态性能,使其具有更强的适应性。
2.1 微粒群优化算法
微粒群优化算法(Particle Swarm Optimization)与其他进化类算法相似,同样采用“群体”和“进化”的概念,它主要是受人类对鸟类群体行为的建模和仿真研究结果的启发,从而用于优化问题的解决[8]。
2.2 微粒群优化模糊控制器实现
模糊控制器的输入变量有两个,分别为直流电机的给定转速与实际转速的偏差e和偏差变化率ec,其输出变量为u,ke和kec分别为e和ec的量化因子,ku为u的比例因子,模糊量E,EC和U的语言变量论域有7个语言变量,设为NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)[10?11]。
通过将模糊控制和微粒群优化算法相结合,根据它们各自的特点,采用改进的微粒群算法实时自动调节和修改模糊控制器的参数,使其成为权重可调的自适应模糊控制器。微粒群优化的模糊PID控制系统的结构图如图6所示。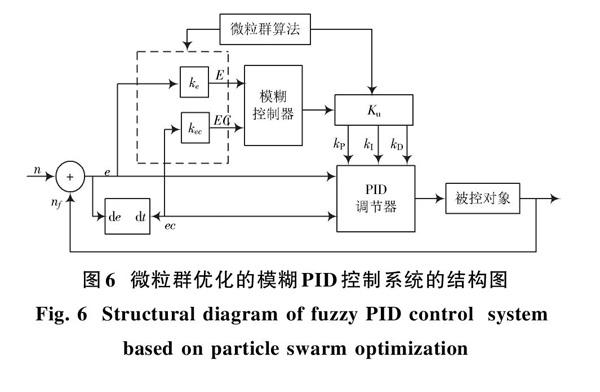
3 仿真实验与结果分析
在Matlab/Simulink环境中进行仿真实验,验证该直流电机控制方法的正确性和系统工作的性能,并与传统的PID控制性能进行比较。
由图可知,该控制方法可以满足调速系统的要求,其性能明显优于传统的PID控制,系统响应的时间更短,工作稳定可靠,无超调量,系统的调速性能得到了极大的提高。
4 结 论
本文提出基于STM32单片机的直流电机数字调速系统能够实现直流电动机的PWM波脉宽控制,结合电流传感器可以实现电机的双闭环数字控制。开发的调速系统样机通过在实验室的调试使用,结果表明该系统可以安全可靠的工作,兼具响应速度快和控制精度高等优势,具有一定的推广应用价值。
参考文献
[1] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2004.
CHEN Baishi. Electric drive automatic control system [M]. Beijing: China Machine Press, 2004.
[2] 喻金錢,喻斌.STM32系列Cortex?M3核微控制器开发与应用[M].北京:清华大学出版社,2011.
YU Jinqian, YU Bin. Development and application of STM32 series Cortex?M3 core microcontroller [M]. Beijing: Tsinghua University Press, 2011.
[3] 林丹,王楠楠.基于STM32与RS 485网络的直流电机驱动模块设计[J].制造业与自动化,2015,37(6):92?94.
LIN Dan, WANG Nannan. Design of DC motor driver module based on STM32 and RS485 network [J]. Manufacturing automation, 2015, 37(6): 92?94.
[4] 王苏.直流电机PWM调速研究及单片机控制实现[J].机电工程技术,2008,37(11):82?84.
WANG Su. Research on DC motor PWM speed and SCM control [J]. Mechanical &; electrical engineering technology, 2008, 37(11): 82?84.
[5] 刘国志,张富贵,吴雪梅,等.基于DSP的直流电机模糊PID控制系统的研究与仿真[J].中国农机化学报,2013,34(6):273?278.
LIU Guozhi, ZHANG Fugui, WU Xuemei, et al. Study and simulation of fuzzy PID control system for DC motor based on DSP [J]. Journal of Chinese agricultural mechanization, 2013, 34(6): 273?278.
[6] 王婷婷,徐洪学.直流调速系统转速调节器参数变化规律研究[J].沈阳理工大学学报,2012,31(5):6?9.
WANG Tingting, XU Hongxue. Research on the change laws of speed regulator parameters in the DC speed control system [J]. Transactions of Shenyang Ligong University, 2012, 31(5): 6?9.
[7] 赵正黎,于惠钧,张发明,等.基于模糊PID控制的直流电机调速系统[J].湖南工业大学学报,2015,29(2):38?43.
ZHAO Zhengli, YU Huijun, ZHANG Faming, et al. DC motor speed control system based on fuzzy PID control [J]. Journal of Hunan University of Technology, 2015, 16(2): 23?26.
[8] 杨维,李歧强.粒子群优化算法综述[J].中国工程科学,2004,6(5):87?94.
YANG Wei, LI Qiqiang. Survey of particle swarm optimization algorithm [J]. Engineering science, 2004, 6(5): 87?94.
[9] 朱海梅,吴永萍.一种高速收敛粒子群优化算法[J].控制与决策,2010,25(1):20?24.
ZHU Haimei, WU Yongping. A PSO algorithm with high speed convergence [J]. Control and decision, 2010, 25(1): 20?24.
[10] 王亮,孙守娟.基于模糊控制的双闭环系统及仿真分析[J].制造业自动化,2013,35(9):51?53.
WANG Liang, SUN Shoujuan. The simulation analysis of double loop system based on the fuzzy control [J]. Manufacturing automation, 2013, 35(9): 51?53.
[11] 郑光,王迤冉.双闭环直流调速系统优化及仿真研究[J].计算机仿真,2013,30(7):321?325.
ZHENG Guang, WANG Yiran. Simulation and optimization of parameters of double closed?loop DC speed tuning system [J]. Computer simulation, 2013, 30(7): 321?325.
