不确定分数阶非线性系统稳定性分析及滑模同步控制
2018-04-11高瑜,李雄
高 瑜, 李 雄
(1.陕西铁路工程职业技术学院 基础课部, 陕西 渭南 714000; 2.西安欧亚学院 数理与信息技术应用中心, 陕西 西安 710065)
0 引言
分数阶微积分已经有300多年的发展历史了,随着研究的深入,不确定分数阶混沌系统成为了最热门研究的领域,推动了分数阶非线性系统稳定性分析及同步控制方法的蓬勃发展[1-3].混沌系统控制方法由于在通信领域的广泛应用得到了研究者的重视,人们相继提出了很多种分数阶混沌系统的同步控制方法[4],如滑模变结构控制法[5]、自适应控制法[6]、模糊控制法[7]、脉冲控制法和Backstepping控制法等[8-10].对于不确定分数阶非线性系统同步控制也有一些结果[11],如文献[12]在系统不确定项满足有界的情况下利用滑模控制实现了不确定分数阶Duffing-Holmes系统的同步问题,文献[13]研究了不确定分数阶混沌系统的自适应模糊同步控制问题等.
自适应滑模控制方法常用来研究带不确定项的分数阶非线性系统,并且在稳定性分析中通常构造平方Lyapunov函数.随着文献[2]提出了分数阶系统的Lyapunov第二方法,对于分数阶非线性系统的控制及稳定性分析逐渐成为研究热点.但平方函数具有非常复杂的分数阶导数形式,这也使得分数阶非线性系统稳定性分析中无法应用平方Lyapunov函数.所以到目前为止几乎没有文献成功实现分数阶混沌系统自适应滑模控制或同步.随着研究的深入,许多分数阶模型不仅需要满足渐近稳定,更需要在有限时间内稳定,这也给非线性系统稳定性分析带来了难度.文献[14]研究了分数阶非线性系统在有限时间内不存在稳定点的问题,推动了非线性系统有限时间稳定性理论的进一步发展.在非线性系统有限时间稳定理论中,文献[15]通过变量替换和函数构造提出了一个新的非线性系统有限时间稳定的充分条件,具有很强的推广性,但是只是针对一类整数阶非线性系统,对于分数阶非线性系统有限时间稳定性理论的研究还尚未深入.
本文主要研究了基于滑模控制的不确定分数阶非线性系统同步,首先针对二维分数阶混沌系统,通过构造分数阶滑模面及分数阶微分方程形式的自适应规则,设计了同步控制器,并利用分数阶Lyapunov第二方法证明了构造方法的合理性(需要指出的是本文系统中的不确定项可以是完全未知的).以分数阶Arneodo系统和分数阶Genesio系统为实例,实现了驱动系统和响应系统的异结构有限时间同步控制(即在有限时间内误差系统趋于滑模面),验证了该方法和控制器的有效性.
1 预备知识
在研究的过程中对分数阶微积分概念提出了多种定义,其中最常用的有以下三种:Grunwald-Letnikov、Riemann-Liouville (R-L)、Caputo,本文采用Caputo的定义作为工具,因为Caputo定义中的系统的初值和整数阶系统的一样,具有较好的物理意义[16].分数阶微积分定义为
其中:Γ(·)为Gamma函数.
当0<α<1时,Caputo分数阶微分的解等价于:
定义1双参数Mittag-Leffler函数定义为
其中:α,β>0,z为复数,Γ(·)为Gamma函数,其Laplace变化定义为
其中:R(s)为s的实部,λ∈R,Γ(·)为Laplace变换.
引理1[17]若满足以下等式:
其中:x(t)和y(t)∈Rn具有连续的一阶导数,P,Q∈Rn×n为两个正定矩阵.若存在正定的矩阵M和正常数h使得

引理2[18]设x(t)∈Rn且具有连续的一阶导数,则
其中:P为任意的n阶正定矩阵.
引理3考虑如下的分数阶系统
其中:0<α<1,A为系数矩阵,若存在实对称正定矩阵P,使得
xT(t)Px(t)=0成立,则系统渐近稳定.


若t2>t1≥0时,有
这也就证明了x(t)在[0,+∞)上单调减少.
引理5(分数阶Lyapunov第二方法)设原点是如下分数阶非线性系统的平衡点:
其中:x(t)∈Rn为系统变量,f(t,x(t))为满足局部Lipschitz条件的非线性函数.若存在Lyapunov函数V(t,x(t))和K类函数αi(i=1,2,3)使得
α1‖x(t)‖≤V(t,x(t))≤α2‖x(t)‖,
则系统渐近稳定.
2 问题描述
考虑如下的二维不确定分数阶混沌系统
其中:α∈(0,1),X(t)=[x1,x2]∈R2为系统输入变量,f(X,t)∈R为非线性函数,Δf(X)∈R为系统的不确定项,dx(t)∈R为随机扰动,u(t)∈R为控制变量.
考虑如下的响应系统
其中:Y(t)=[y1,y2]∈R2为系统响应变量,g(Y,t)∈R为非线性函数,Δg(Y)∈R为系统的不确定项,dy(t)∈R为随机扰动.
定义如下的同步误差系统

假设1系统不确定项Δg(Y),Δf(X)为有界变量,即存在正常数γ1,使得
|Δf(x)-Δg(Y)|<γ1成立.
假设2系统随机扰动dx(t),dy(t)为有界变量,即存在正常数γ2,使得
|dx(t)-dy(t)|<γ2成立.
3 主要结果
3.1 分数阶滑模面设计
设计如下的分数阶滑模面
当系统发生滑模运动时,需满足如下条件
通过简单的证明推导,可以得出上式是渐近稳定的,即误差系统变量趋于零.
3.2 控制器设计
本文所要讨论的问题是如何设计同步控制器,使得误差系统能在有限时间内达到或趋近于滑模面
由误差系统方差可以得到,
f(X,t)-Δf(X)-dx(t)-u(t)
u(t)e=g(Y,t)+Δg(Y)+dy(t)-
f(X,t)-Δf(X)-dx(t)+
(k1ei+k2sign(ei)|ei|ρ)
为了实现同步误差系统能够在有限时间内稳定,本文设计如下的自适应规则:
ur(t)=ξis+ξi+1|s|δsign(s)
其中:ξi,ξi+1>0,δ∈(0,1).
因此,可以设计如下的控制器:
u(t)=u(t)e+u(t)r=g(Y,t)+Δg(Y)+
dy(t)-f(X,t)-Δf(X)-dx(t)+(k1ei+
k2sign(ei)|ei+1|ρ)+(ξ1s+ξ2sign(s)|s|δ).
定理1考虑设计的分数阶滑模面,给定初始条件及自适应规则,误差系统能够在有限时间内趋于滑模面s(t)=0.


进一步可得

DαV≤s(f(X,t)+Δf(X,t)+d(t)+

DαV≤s(f(X,t)+Δf(X,t)+d(t)-

经过简单的变形,很容易就能得到
DαV≤|s|(|Δf(X,t)|+|d(t)|)-
s((γ1+γ2)sgn(s)+ξ1s+ξ2sgn(s))+ϑ|s|
DαV≤-ξ1s2-ξ2|s|+ϑ|s|≤
-(ξ2-ϑ)|s|≤-ξ1s2
定理1证毕.
定理2给定初始条件下,设计如上的自适应滑模控制器和自适应规则的作用下,同步误差系统能够在有限时间内趋近滑模面,即实现了驱动系统和响应系统同步控制.
将滑模面方程带入上式中得
dy(t)-f(X,t)-Δf(X)-dx(t)-u(t)+
由假设1和假设2可得
k2sign(ei)|ei|ρ))
g(Y,t)+f(X,t)-sign(s)(γ1+γ2)+
K2sign(ei)|ei|ρ)-(ξ1s+ξ2|s|δsign(s)))
-(ξ1|s|+ξ2|s|δ)≤-ξ|s|
其中ξ=min{ξ1,ξ2}.
由上式可以进一步得
对上式两边同时取(0,t)上的积分得
4 数值仿真
仿真中驱动系统选取为分数阶Genesio系统:
响应系统选取为分数阶Arneodo系统:
系统不确定项与随机扰动分别选取如下:
Δf(X)+dx(t)=0.15cos(3t)x2-0.1sin(t)
Δg(Y)+dy(t)=0.1sin(2t)y2+0.15cos(5t)
选取系统初值:
x1(0)=0.2,x2(0)=-0.2,x3(0)=-0.3,
y1(0)=-0.1,y2(0)=0.3,y1(0)=-0.2.
给定参数:
k1=k2=1,ρ=δ=0.9,ξ1=ξ2=2,
γ1=γ2=0.75,α=0.9.
由定理1设计如下滑模面与同步控制器:
s(t)=e2+(k1ei+k2sign(e1)|e1|ρ) =
e2+e1+sign(e1)|e1|0.9
u(t)=u(t)e+u(t)r=-y1-x1+0.1sin(2t)y2+0.15cos(5t)-0.15cos(3t)x2+0.1sint+(e1+sign(e1)|e1|0.9)+(2s+2sign(s)|s|0.9).
仿真结果如图1~3所示.
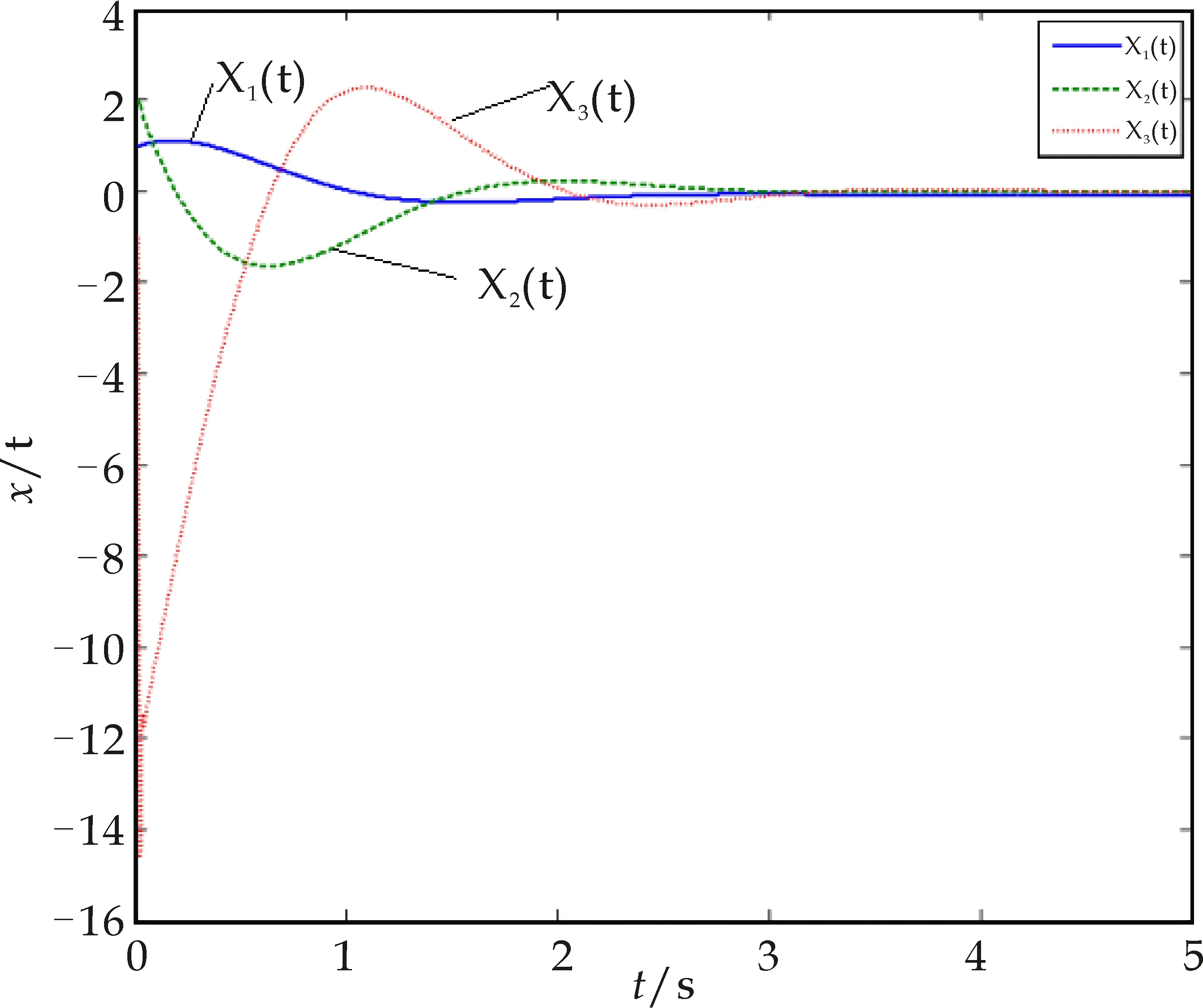
图1 受控分数阶Arneodo系统曲线图
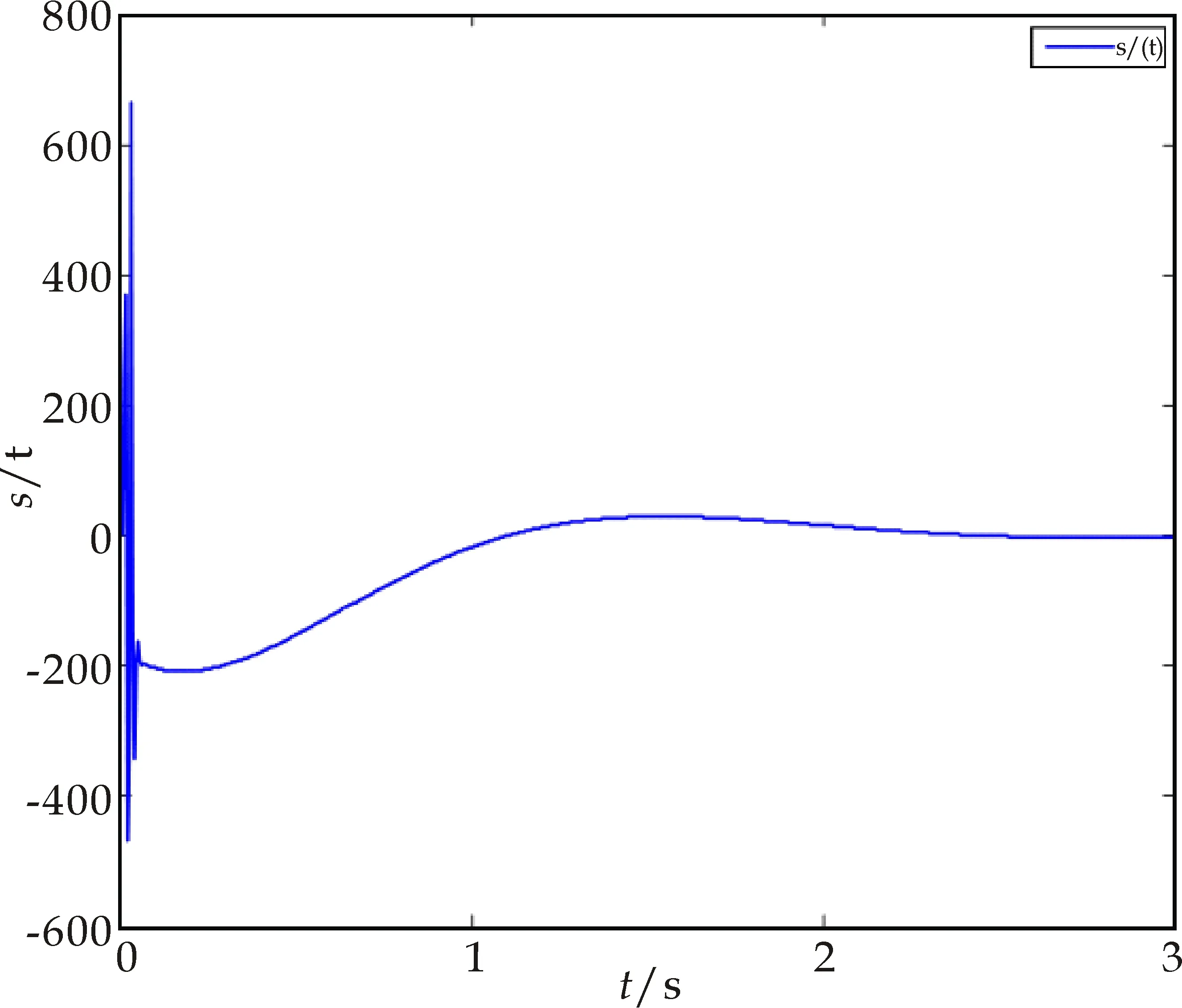
图2 分数阶滑模面 随时间变化曲线
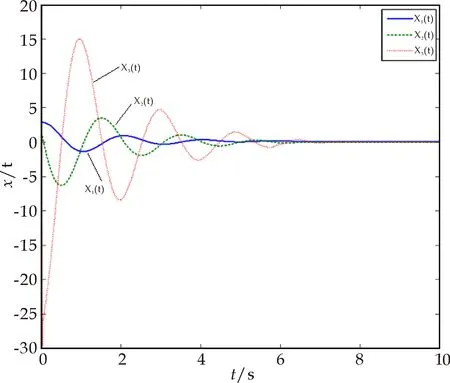
图3 受控分数阶Genesio系统状态轨迹曲线
5 结论
本文研究了不确定分数阶非线性系统自适应滑模同步控制,通过构造分数阶滑模面以及分数阶自适应规则,在满足系统所有变量有界的情况下,利用Lyapunov函数证明了定理的有效性和鲁棒性.基于该理论提出了分数阶可变结构控制器,并验证了在满足系统所有变量有界的情况下误差系统能够在有限时间内趋于滑模面,数值仿真中实现了分数阶Genesio系统和分数阶Arneodo系统的异结构有限时间同步,通过合理选取初值与参数值进行数值仿真,可以得到误差系统能够在有限时间内趋于滑模面.该理论的研究有助于掌握分数阶非线性系统的相关性质,同步控制方法也具有良好的鲁棒性.本文所研究的方法仍需进一步改进,针对不同的阶次控制效果可能出现差异性,更严格的控制输入条件下实现自适应同步控制需要进一步的研究.
[1] Igor Podlubny.Fractional differential equations[M].New York:Academic Press Publishers,1999.
[2] Yan Li,YangQuan Chen,Igor Podlubny.Mittag-Leffler stability of fractional order nonlinear dynamic systems[J].Automatica,2009,45:1 965-1 969.
[3] Denis Matignon.Stability results for fractional differential equations with applications to control processing[J].Computational Engineering in Systems Applications,1996,2:963-968.
[4] Suwat Kuntanapreeda.Robust synchronization of fractional order unified chaotic systems via linear control[J].Computers and Mathematics with Applications,2012,63:183-190.
[5] Li Ping Chen,Yi Chai,Ran Chao Wu,et al.Stability and stabilization of a class of nonlinear fractional order systems with Caputo derivative[J].IEEE Transactions on Circuits and SyestemsII:Express Briefs,2012,59(9):602-606.
[6] Chun Yin,Shou Ming Zhong,Wu Fan Chen.Design of sliding mode controller for a class of fractional-order chaotic systems[J].Commun Nonlinear Sci Numer Simulat,2012,17:356-366.
[7] Xiang Jun Wen,Zheng Mao Wu,Jun Guo Lu.Stability analysis of a class of nonlinear fractional-order systems[J].IEEE Trans Circuits Syst.II,Exp.Briefs,2008,55(11):1 178-1 182.
[8] Fallahi Kia,Leung Henry.A chaos secure communication scheme based on multiplication modulation[J].Commun Nonlinear Sci Num Simul,2010,25:368-383.
[9] Mohammad Pourmahmood Aghababa.A Lyapunov based control scheme for robust stabilization of fractional chaotic systems[J].Nonlinear Dyn,2014,78:2 129-2 140.
[10] Hai Bo Du,Ying Ying Cheng,Yi Gang He,et al.Finite-time output feedback control for a class of second-order nonlinear systems with application to DC-DC buck converters[J].Nonlinear Dyn,2014,78:2 021-2 030.
[11] Hao Feng,Yang Yang,Shi Ping Yang.A new method for full state hybrid projective synchronization of different fractional order chaotic systems[J].Applied Mechanics and Materials,2013,285:919-922.
[12] 谭文,李志攀,王耀南,等.一个混沌系统的同步控制研究[J].计算机工程与应用,2011,47(4):219-222.
[13] 王兴元,孟娟.自治混沌系统的线性和非线性广义同步[J].物理学报2008,57(2):726-730.
[14] 王兴元,王勇.基于线性分离的自治混沌系统的投影同步[J].物理学报,2007,56(5):2 498-2 503.
[15] 赵灵冬,胡建兵,刘旭辉.参数未知的分数阶超混沌Lorenz系统的自适应追踪控制与同步[J].物理学报,2010,59(4):2 305-2 309.
[16] 赵建利,王京,王慧.洛伦兹-哈肯激光混沌系统有限时间稳定主动控制方法研究[J].物理学报,2012,61(11):110-209.
[17] Jun Shen,James Lam.Non-existence of finite-time stable equilibria in fractional-order nonlinear systems[J].Automatica,2014,50:547-551.
[18] 陈国培,杨莹,李俊民.非线性系统有限时间稳定的一个新的充分条件[J].控制与决策,2011,26(6):837-840.