“8”小车的机构设计及应用
2018-04-10曲全鹏乔江涛赵朝阳纪渊博
曲全鹏 乔江涛 赵朝阳 纪渊博
摘要: 本文是根据河南省第五届大学生工程训练综合能力竞赛要求,设计出“8”字循迹小车,该小车的驱动行走及转向能量是根据重力势能转换原理,完全依靠给定砝码的重力势能转换而来。通过不断对“8”字小车的摸索,小车的设计以及对各个零件的设计得以创新、用MATLAB软件程序给各个参数赋予初值得出最优解以及对小车的前景做出简单的陈述。
Abstract: In this paper, according to the requirements of the fifth university students' comprehensive training in engineering ability in Henan Province, the "8" shaped tracking car is designed. The driving and steering energy of the car is totally converted from the gravity potential of the given weight according to the principle of gravity potential energy conversion. Through constant exploration of the "8" car, the design of the car and the design of each part are innovated. The MATLAB software program is used to give initial values for each parameter to get the optimal solution and make a simple statement about the future of the car.
關键词: 无碳小车;“8”字循迹;齿轮传动;四连杆传动机构
Key words: carbon-free car;"8" shaped track;gear transmission;four-link transmission
中图分类号:TH128 文献标识码:A 文章编号:1006-4311(2018)11-0116-03
0 引言
随着人们对节能环保意识的不断提升,低碳和无碳的生活观念被人们提上研究的课程。更洁净、更环保、更节能、更高效的理念也深入人心。为此教育部高等教育部举办全国大学生工程训练综合能力竞赛,竞赛的题目是设计一种将重力势能转换为机械能,并可用来驱动其行走及转向装置的无碳小车。该小车着重体现了无碳的概念,小车的动能完全由重力势能提供,是对环保的最高理想。利用重力势能这唯一的能量让小车行走并能躲开障碍物,该小车是对“无碳”理念的探索与开发,对未来“无碳”的憧憬。为培养大学生的创新设计意识、综合工程应用能力和团队协作精神,促进大学生基础知识与综合能力的培养、理论与实践的有机结合。
1 设计要求
设计一种小车,根据重量能量转换原理,驱动其行走及转向的能量是由给定重力势能转换而得到的。该小车的重力势能统一使用质量为1kg的标准砝码(¢50×65 mm,碳钢制作),砝码的可下降高度为400±2mm。砝码始终由小车承载,不允许从小车上掉落。小车在行走过程中完成所有动作所需的能量都应由此给定砝码的重力势能转换而得,不可以使用其他任何来源的能量。小车应具有转向控制机构,并且此转向机构具有可调节功能,可以适应放置不同间距障碍物的竞赛场地。
2 设计思路与方案(图1)
3 功能分析
对小车功能要求进行分析,寻找功能的最优解,将小车分为六个模块分别是车架、原动机构、传动机构、转向机构、行走机构和微调机构。对每一个模块进行多方案设计,综合对比选择最优的方案组合。
单轮驱动:特色机构为单轮驱动装置,即相当于差速机构。
无碳小车两侧的行驶所受的阻力相同,单轮驱动不起差速作用。
则w1=w2=w0
即w1+w2=2w0,n1+n2=2n0
无碳小车转向(两侧的行驶轮子阻力不相同):
如无碳小车右转向,外侧行驶车轮有滑移的趋势,内侧行驶车轮有滑移的趋势,即外侧行驶车轮阻力小,内侧行驶车轮阻力大,单轮驱动起到差速作用。
则w1=w0+w3,w2=w0-w3(差速作用)
即w1+w2=2w0,n1+n2=2n0
w为车轮转角,n为转速,w0是自设转角值,w1是主动轮转角,w2是从动轮转角,n0自设转速,n1是主动轮转速,n2从动轮转速。
4 参数分析与个性化设计
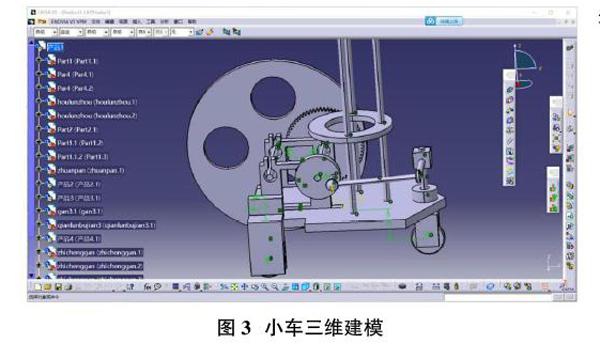
利用catia软件进行小车的实体建模、部分运动仿真。对于方案建立数学建模进行处理分析,使用MATLAB软件分别进行能量消耗分析、运动学分析、动力学分析、灵敏度分析,得出小车的具体参数和运动规律。
小车的底板不能过大,过大会影响小车的转向功能,小车将无法按照一定的运动轨迹行驶。底板过小小车的平稳性无法现实,底板的厚度不能过厚过厚小车的质量大大增加,会导致小车无法起步,过薄底板的强度无法保证,底板易变形。经实验试验及运动仿真得出底板的长度为120mm,宽为100mm,厚度为6mm为最佳,让能量得以充分利用。小车三维建模如图3所示。
小车的轴承、轴及齿轮的参数经运动仿真及能量公式的运算得出理想的参数,使重锤的势能得以充分的利用。为使能量更好的充分利用,原动力的驱动力不宜过大,过大会使小车的速度加大,使小车的平稳性大大降低。过小无法正常启动。用运动仿真得出适当的驱动力矩,使小车平稳行驶,达到最优效果。
5 无碳小车整体结构
为适应大赛赛题,前轮转向,后轮驱动,后轮A为驱动轮,采用单轮驱动另一个为从动小轮实现差速运动,使小车运动时实现差速,平稳启动,平稳运行,达到小车的运动最优效果。小车整体结构如图4所示。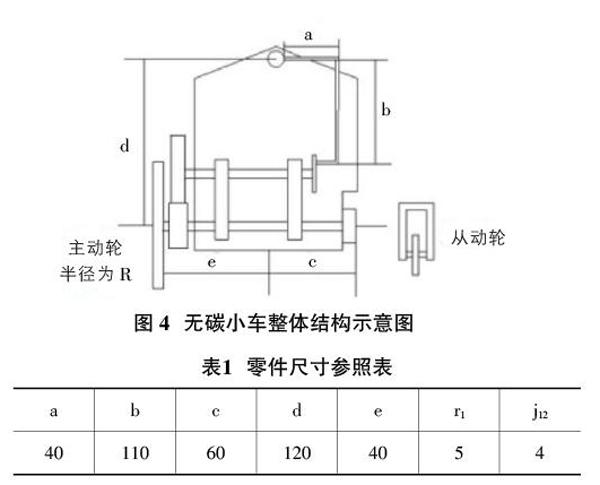
6 驱动系统建模分析
无碳小车在行驶中,砝码缓慢下落dh时,砝码线带动绕线轴转动,绕线轴与大齿轮过盈配合带动小齿轮转动,间接的带动驱动后轮转动,传动比为i12,则主动轮A前进的距离
转向系统的曲柄安装在绕线轴上,曲柄所转过的角度与绕线轴所转过的角度一样,故曲柄所转过的角度为
7 转向系统的建模分析
无碳小车的转向机构是空间四连杆机构,应用数学建模求解曲柄L1的输入角和 杆L3的输出角?兹 之间的关系。建立空间直角坐标系,具体如图5所示。
各点坐标为:A(0,0,z0),D(x0,0,0),B(xb,yb,zb),C(xc,yc,zc)
設计过程中必须要求:zc=z0、当曲柄L1绕OZ轴转动到YOZ平面内时,摇杆L3与OZ轴必须保持同一个平面内。
由空间坐标系点与点之间的关系得:
l22=(xb-xc)2+(yb-yc)2+(zb-zc)2(1)
用数学知识得出点B、C与L1、、L3和?兹的关系如下:
将点B、C的坐标代入公式(1)得
设A=2l1l3cos-2x0l3
B=2l32
C=-(l12-l22+2l32+x02-2x0l1cos)
则原式可写为
A cos +B sin C=0
利用工程数学解三角函数的方法得
8 小车行走轨迹
无碳小车前轮为转向轮,A轮为主动轮,B轮为从动轮。当重锤下落时,带动绕线轴转动,带动大齿轮转动,然后大齿轮带动小齿轮转动,从而后轮轴带动驱动轮A驱动小车前进,无碳小车的前轮做周期性摆动。当无碳小车前轮转过的角度为?兹时,小车前进距离为ds。小车整体转过的角度为
在乒乓球台的二维坐标系中,小车转过的角度为?琢时,有
小车其他轮的轨迹
以从动轮B为参考,在小车的运动坐标系中,轮A的坐标(-(e+c),0),C的坐标(-c,d)
在乒乓球台坐标系中,故关系如下:
xB=xA-(e+c)·cos?琢 yB=yA-(e+c)·sin?琢
xC=xA-c·cos?琢-d sin?琢 yC=yA+d·cos?琢-c sin?琢
用Graph软件画出“8”字图像如图6所示。
AB段:f(x)=(-260 BC段:f(x)=(-260 CD段:f(x)=-60sin(pi×x/400)(-200 DE段:f(x)=-(200 EF段:f(x)=(200 FA段:f(x)=60 sin(pi×x/400)(-200 小车的运动轨迹按照从A-B-C-D-E-F的顺序进行运动,运用线积分的知识计算出小车一个周期所行驶的路程。利用反求法计算出小车的各个参数。再用MATLAB软件程序中给各个参数赋予初值,假定绳轮转角速度已知(在传动比确定的条件,角速度不影响小车运动轨迹形状)不断地进行赋值使得出的合理的“8”字图形。如图6所示。具体值为:(零件尺寸参照表)齿轮传动比i12为4,绕线轴半径i1为3,轮半径R为5,曲柄为30,连杆L2为110,转向杆L3为40,e为40,c为60,d为120。再利用数学建模知识,将无碳小车的各个参数进行数学建模合理分析,在无碳小车各个参数在合理的范围内得出能量损失率最低值,从而得出最优的无碳小车各个参数,使小车在原有的基础上行驶更远的距离。 在理想状态下无碳小车驱动轮运动轨迹如图7所示,且重锤的势能得到充分的利用。但是实际的运动过程中,由于小车受到各种因素的限制,导致实际运动轨迹与理想运动分析轨迹存在偏差。此时就要对转向机构进行微调化,微调化会让小车的不定因素降低到最低化,让小车平稳行驶,走出最远距离。 9 结束语 本次小车的设计是通过砝码下落拉动主动轮运动,利用齿轮把动力传递给后轮,后轮是驱动轮带动小车前行。前轮换向时的角度是根据两个后轮的轮距与前后轴间距的比值计算得出来的,换向的时间是通过四连杆机构的间歇比来控制的。经过不断优化和改进,本次设计的小车具有整车质量轻、转向灵活、转角可调范围大等特点。 通过该小车的设计制作过程培养大了学生的创新设计意识、综合工程应用能力和团队协作精神,促进学生基础知识与综合能力的培养、理论与实践的有机结合,养成良好的学风,为优秀人才脱颖而出创造条件。有望在教学方面成为教学的实例展现在学生面前,介绍空间四连杆机构的构成及运动方法,提高学生的学习兴趣,生动形象的展示机械的魅力。也可以生产大型无碳小车,可以用于工厂车间货物的短途运输。有望在小车上安装各类传感器,自动避开任何障阻,实现短长途载人功能。做出真正意义上的无碳小车。 参考文献: [1] [2]濮良贵,陈国定,吴立言.机械设计[M].高等教育出版社,2012. [3]朱琳.机械制造工程学[M].中国石化出版社. [4]邹慧君,殷鸿梁.间歇运动机构设计与应用创新[M].机械工业出版社,2008.