OCXO高精度时间维持的自适应修正算法
2018-04-09王红建黄文德刘志俭
王红建, 王 玲, 黄文德, 刘志俭
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.国防科技大学 机电工程与自动化学院,湖南 长沙 410073;3.中国科学院 上海天文台,上海 200030;4.中国航天电子科技有限公司,北京 100003)
0 引 言
恒温晶体振荡器(oven controlled crystal oscillator,OCXO)是目前频率稳定度和准确度比较高的晶体振荡器;且OCXO兼顾体积小、功耗低、价格低的优点广泛用于电子仪器、IT工业、通信等领域。然而由于温度、老化等因素使得晶振的频率发生漂移——其长期稳定性比较差。因此,OCXO一般不单独使用,而是通过与外部参考频率进行时间同步从而保证其高精度的授时功能。系统运行在丢失外部频率参考的时间段,即保持阶段,晶振频率漂移得不到参考频率源的修正,其频率精度将达不到要求。通常3GPP2(The 3rd generation partnership project 2)组织要求码分多址(code division multiple access,CDMA)系统的时间模块在没有外部频率参考的情况下,8 h内系统的累积时间误差(cumulative time error,CTE)不超过10 μs[1]。
在对时钟精度要求高的场合中可以选择性能更佳的时钟源,但会面临时钟源体积、功耗、价格等方面的问题。因此,寻求一些方法以补偿晶振的频率漂移使得OCXO在进入保持阶段后满足高精度授时是必要的。
文献[1]建立晶振的自适应模型,用滤波器将修正量中影响晶振的老化和温度因素分离,并利用Kalman 滤波算法进行参数估计;当系统进入保持阶段,晶振的自适应模型输出晶振修正信号的预测值。但是由于滤波器的过渡带、延时补偿的不精确以及Kalman滤波器初始状态的修正信号误差等因素限制了模型预报的精度。文献[2,3]提出了更加精确的自适应控制模型,除对老化、温度考量外还对参考时钟源的秒抖动噪声和D/A转换的量化误差进行了建模。然而,噪声模型的局限性以及噪声的处理方法限制了晶振频率精度的提高。
本文根据晶振频率的温度和老化特性以及OCXO驯服系统的噪声特性建立模型集,利用增广最小二乘算法对模型集进行参数识别。当系统进入保持阶段,输出晶振误差的预报值。借助MATLAB建模仿真,系统8 h内的CTE不超过1 μs。结果表明:该自适应控制模型能更加逼近真实的系统,实现了更高精度的晶振频率偏移预报。
1 OCXO驯服系统的工作原理
图1为OCXO驯服保持系统的自适应控制模型框图。其运行机理如下:1)BD RX模块接收北斗导航卫星信号并输出卫星1 pps时标信息;2)分频器将本地10 MHz晶振频率进行分频进而得到本地晶振的1 pps时标信息;3)用相位鉴别器对卫星1 pps和晶振1 pps时标信息进行相位检测得到修正信号,并用此信号修正晶振频率的精度;4)同时利用修正信号辨识自适应控制模型的模型参数;5)当BD卫星失锁时,用控制模型的预报值修正晶振频率精度。
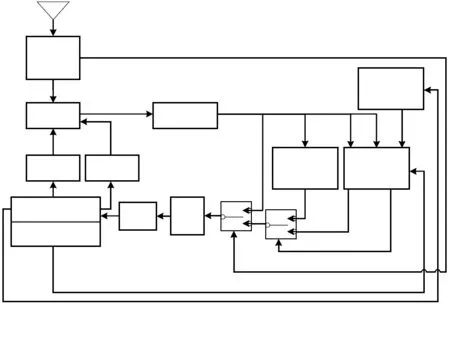
图1 OCXO驯服保持系统的自适应控制模型
图1中的平均修正信号模块的作用是在卫星失锁时自适应控制模型的算法还未收敛的情况下,由控制模型中算法收敛控制信号激活,并将修正信号过去2 000点历史数据的平均值输出,作为修正信号的预报值。自适应控制模型有2路信号来自修正信号,其中一路作为OCXO驯服系统的噪声信号。
2 OCXO驯服系统建模方法
晶振驯服系统中频率稳定度的影响因子主要包括:1)温度和老化因素对晶振频率输出的影响;2)参考时钟源的秒抖动误差、元器件噪声、D/A量化误差等系统噪声对频率的影响。所以,晶振驯服系统模型的建立分为两部分:晶振本体建模和驯服系统建模。
2.1 晶振本体建模
在晶振建模中主要考虑老化特性和温度特性对频率稳定性的影响[4]。时间和温度的关系可采用如下数学模型[5]表示
(1)
式中T为温度;x0为相位初始偏差;y0为初始频率偏差;a为温度引起的频率漂移。相位在物理上表现为时间延迟,为频率的积分。
老化特性的模型为
(2)
式中e为老化引起的频率漂移。事实上,为保证老化特性的数学模型对实际系统绝对的线性逼近,忽略上述模型中二阶项对相位的影响。最终老化特性数学模型为
x(t)=x0+y0·t
(3)
则晶振本体的数学模型为
y=a·T2+b·T+c+d·t
(4)
2.2 驯服系统建模
除了对晶振本体进行模型建立外,还需对这些噪声时行模型建立[5,6]。图2 为OCXO驯服系统的噪声传递示意。
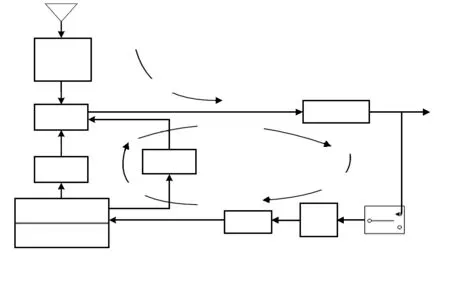
图2 OCXO驯服系统的噪声传递
如图2所示,信号在传播的过程中,每经过一个环节均会加入该环节的噪声。由线性系统特性可知,受染的信号包含该环节噪声的分布特性。即信号通过一个线性环节变成一种新的噪声,继续向下传播。认为各个环节的噪声独立,根据中心极限定理,最终的修正信号服从高斯分布。将驯服系统的噪声用滑动平均模型(MA)刻画,即
(5)
式中v(k)为OCXO驯服系统的第k时刻噪声输出。
综合上述2类模型,OCXO驯服系统的数学模型为
y=a·T2+b·T+c+d·t+e0·v(t)+e1·v(t-1)
(6)
本文将噪声模型考虑到一阶项。
3 OCXO高精度时间维持的自适应修正算法
辨识算法的选用取决于模型类的选择[7,8],式(6)的模型类采用增广最小二乘法进行辨识。由于测量误差和预测精度的限制,很难确定真实的系统状态。在逐次递推中,每次辨识利用新的测量数据,前次的预测值以及预测值的可信度来修正当前的模型参数。最终使模型的预测值与测量值的误差最小。
由式(6)可知,输入数据有3类:来自温度传感器的温度数据、系统的运行时间数据和OCXO驯服系统的噪声数据。噪声数据,“藏匿”在修正信号中。所以,噪声数据可直接由修正信号的测量值代替,通过已建立的噪声模型提取系统的噪声特性。在保持阶段,模型采用式(7)输出修正信号的预报值
y=a·T2+b·T+c+d·t
(7)
将式(6)中的时间t换成离散形式的时间k,令
h=[T2(k)T(k) 1kv(k)v(k-1)]
θ=[abcde0e1]
(8)
则
y(k)=hθT
(9)
利用增广最小二乘法即可获得参数θ的无偏估计,其递推格式如下
(10)
为启动递推算法,θ(0)和P(0)按式(11)取值
(11)
式中C为比较大的常数;单位阵I的维数为数据长度。
用式(12)作为算法收敛控制信号
(12)
式中ε为设定的足够小的阈值。
当模型参数满足式(12)时算法收敛。说明自适应控制模型的预报值可以作为校正晶振频率输出的修正值。
4 仿真实验与结果分析
采用MATLAB R2014a对模型的预测精度进行仿真验证。图3为Simulink环境下搭建的OCXO驯服系统中老化和温度特性引起的晶振频率偏移量。温度的变化轮廓以正弦曲线呈现,周期为1天。仿真场景的运行时间是3天,固定仿真步长1 s,在1.5天时场景模拟卫星失锁,系统进入保持阶段。在相同噪声环境下,完成3组实验以检验不同模型对晶振频率精度提高的性能。
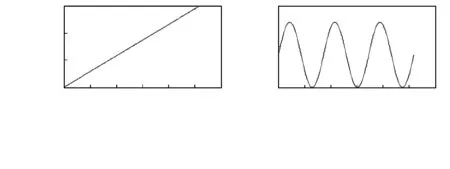
图3 晶振和温度特性引起的晶振频率偏移量
图4为系统进入保持阶段后没有预测修正,晶振全凭自身特性驱使情况下系统的累积时间误差输出变化曲线。由图可见,CTE达到近3 000 μs。
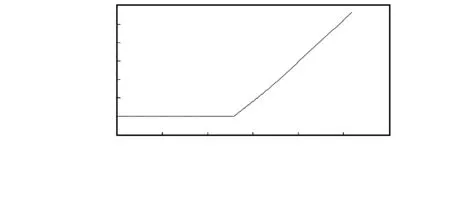
图4 系统未修正情况下CTE曲线
图5中实线代表的CTE输出曲线的ARX模型为
y=a·T2+b·T+c+d·t+v(t)
(13)
该模型未考虑噪声模型。虚线为用本文对ARMAX模型的噪声处理方法做相应改进后的ARMAX模型的CTE输出。ARMAX模型的数学描述如下
y=a·T2+b·T+c+d·t+v(t)+e·v(t-1)
(14)
此模型与本文所使用的模型几乎相同,然而噪声模型的立意大相径庭。ARMAX模型中v(t)+e·v(t-1)为卫星1 pps抖动噪声和系统中的D/A量化噪声。秒抖动和量化噪声导致e趋向但不等于-1。本文与ARMAX模型的另一不同处在于噪声的处理。与采用递推预测误差算处理方法相比[2],这种改进的效果明显。本文选取噪声模型的前2项,参数e0和e1的绝对值由于系统噪声的影响都趋向但不等于1。
图5中Difference图显示,与不考虑任何噪声的ARX模型预测精度相比ARMAX模型对预测精度的提高微弱。说明ARMAX模型中的噪声项对噪声特性的提取能力还存在很大不足。
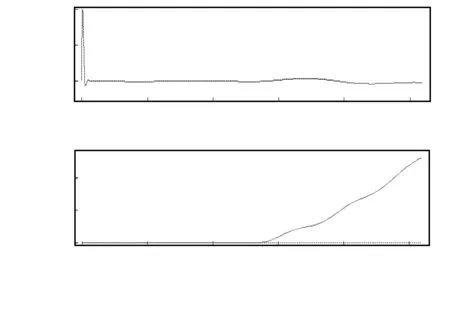
图5 ARMAX模型与ARX模型修正系统时的CTE
图6中黑色虚线为噪声处理方法做相应改进的ARMAX模型的CTE输出曲线;灰色实线为采用本文模型修正时系统的CTE输出曲线。由图6可知,本文自适应控制模型使系统在进入保持阶段后,晶振的频率稳定性得到了极大的改善。
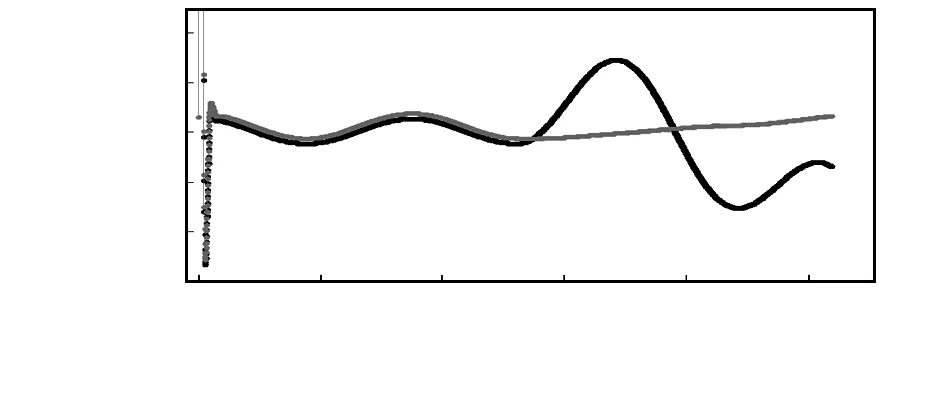
图6 改进模型与ARMAX模型修正系统时的CTE
图7中黑色实线为状态空间模型及Kalman滤波算法修正时系统的CTE输出曲线;灰色实线为采用本文模型修正时系统的CTE输出曲线。相对Kalman滤波算法本文的优势在于:1)Kalman滤波算法中未考虑系统噪声对修正信号的干扰;2)Kalman滤波算法中滤波器的使用,会对输入的信号产生延时和抑制且过滤带使不同影响因素之间相互干扰。这些弊端都为模型的预报精度带来挑战。
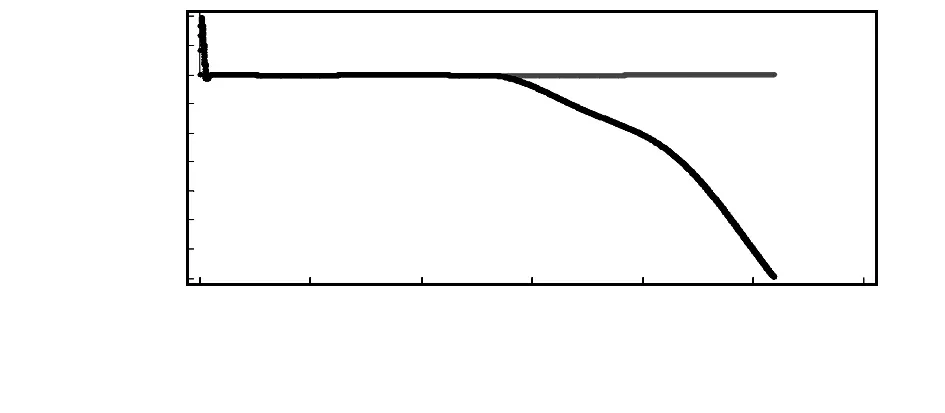
图7 改进模型与状态空间模型修正系统时的CTE
综上所述:本文所提出的算法模型更能反映真实的系统,实现更高精度的晶振频率偏移预报。该模型能将系统进入保持阶段后12 h内的CTE限制在1 μs之内,满足CDMA标准对晶振频率的精度要求。
5 结 论
提出了OCXO驯服系统的建模方法,以及数据选取和等价准则选择问题,通过仿真实验取得了良好的实验效果。在接下来的工作中,将结合实际的工程应用来验证并改进该模型。
参考文献:
[1] Nicholls C W T,Carleton G C.Adaptive OCXO drift correction algorithm[C]∥Proceedings of the IEEE International Frequency Control Symposium and Exposition,2004:509-517.
[2] Zhou H.Adaptive correction method for an OCXO and investigation of analytical cumulative time error upperbound[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2011(1):35-38.
[3] Zhou H.Adaptive high-accuracy timing module:Algorithms and performance bounds[D].Canada:Carleton University,2009.
[4] 孙永红.二级频标的驯服保持技术[D].西安:西安电子科技大学,2010.
[5] 马彦青.恒温晶振OCXO自适应驯服保持技术研究[D].西安:西安电子科技大学,2011.
[6] 张九宾,张丕状,杜坤坤.基于GPS的无线传感器网络时间同步技术[J].传感器与微系统,2009,28(6):31-33.
[7] 侯媛彬,汪 梅,王立琦.系统辨识及其MATLAB仿真[M].北京:电子工业出版社,2012.
[8] 程建华,罗立成,王鑫哲.高精度温度测量系统的测温补偿算法研究[J].传感器与微系统,2010,29(11):36-39.
