水下机器人-机械手系统自适应抗扰控制方法
2018-04-08李冀永张国成秦洪德
李冀永,万 磊,黄 海,张国成,秦洪德
水下机器人-机械手系统自适应抗扰控制方法
李冀永,万 磊,黄 海,张国成,秦洪德
(哈尔滨工程大学水下机器人技术重点实验室,哈尔滨 150001)
针对开架式水下机器人在其作业过程中易受到脐带缆、机械手和海流等扰动影响的问题,为减小改扰动对艇体姿态的影响,文中对开架式水下机器人设计了一种基于模型的自适应抗扰控制方法,并分别对脐带缆和机械手引起的扰动进行了建模分析,具体建立了一种以全局运动学控制环和扰动力补偿项为主的自适应抗扰控制.在SY-Ⅱ开架式水下机器人平台上进行了S面控制和自适应抗扰控制的对比实验.结果表明,脐带缆和机械手的扰动力会对水下机器人的姿态产生较大影响,通过对扰动力的实时估算和补偿,在定深定向、轨迹跟踪实验中,基于模型的抗扰控制方法表现出更高的控制精度,在姿态保持实验中,与S面控制方法相比,自适应抗扰控制展现了较好的鲁棒性,系统轨迹更平稳,具有更强的稳定性.
水下机器人;机械手;脐带缆;抗扰控制
开架式水下机器人在海底观测、海洋工程的管道检测与资源开发、海底作业等方面广泛应用.它们可以通过水面或母船的遥控在极端危险的大深度领域完成潜水员无法胜任的工作[1].然而由于在实际环境中,机器人面临海流等外界环境的干扰,脐带缆[2]和机械手[3]也会同时给载体带来扰动,所以实现开架式水下机器人的长时间精确作业还需要研究精确的控制方法.
开架式水下机器人在其作业过程中受到多方面扰动的综合影响,其中以脐带缆的拖曳力和机械手的干扰力为主.由脐带缆拖曳力造成的扰动影响使操作人员难以对水下机器人进行精确的位置控制;而机械手给水下机器人的悬停定位作业时带来的扰动力(矩),更会对其作业姿态造成较大影响.因此必须深入分析水下机器人的扰动力的特性,对作业过程中机械手、脐带缆产生的扰动力进行补偿.
文献[4-5]分别设计了滑膜控制器和状态反馈控制器对水下机器人进行运动控制,但都没有建立水下机器人所受的扰动力模型.在水下机器人-机械手系统方面,文献[6]针对水下机器人-机械手系统设计了一种自适应控制器,但其动力学模型参数存在较大的不确定性,因此较难应用.文献[7-8]分别基于能量的方法和拉格朗日方程对水下机器人-机械手系统建立了动力学模型,但并没有给出二者耦合运动时机械手给水下机器人的扰动力矩.文献[9-10]系统地分析了机器人-机械手系统的运动学模型,并给出了系统作业过程中浮心和重心变化派生的恢复力(矩),然而并未在模型中给出艇体和机械手相互耦合作用的表达式.脐带缆也会对开架式水下机器人产生较大的扰动,文献[11]建立了脐带缆带来的干扰力模型.文献[12]基于有限元技术,通过PD控制器对脐带缆造成的干扰力进行补偿.文献[13]同时考虑了海流和脐带缆对水下机器人的影响.但上述三者在分析时涉及了较复杂的数值计算,因此在引入机器人外部扰动力分析后,控制器的设计将更加复杂.
本文通过对开架式水下机器人机械手和脐带缆的扰动力分别进行建模和分析,建立一种基于模型的自适应抗扰控制方法,通过该控制方法对水下机器人进行全局控制,并对影响机器人姿态的扰动力进行实时观测和补偿,从而减小机器人作业过程中的扰动,使其更精确地进行作业任务.
1 基于模型的间接自适应控制方法
本节提出了一种基于卡尔曼滤波器的间接自适应控制器,先基于卡尔曼滤波器估计模型中的未知变量,再将估计后的状态变量应用于控制器中.
1.1 自适应控制方法
一个典型的开架式水下机器人结构如图1所示.包括前视声呐、水下摄像机等探测设备;磁罗经、深度计等运动感知传感器;水下机械手等作业设备.控制指令、传感器信息和动力电通过脐带缆在水面和水下之间传输.
开架式水下机器人的动力学模型为
根据动力学模型,所设计的开架式水下机器人的控制律为

(2)
通过机器人配置的多普勒测速仪、深度计、磁罗经等传感器,可获取机器人的实时首向角、纵倾角、横倾角、速度、深度等信息,机器人的实时运动转台可通过扩展卡尔曼滤波器(EKF)获得

(3)


(4)
1.2 稳定性分析
结合式(1)和式(4),形成闭环系统为


(5)


(6)


(7)
考虑到面运动学控制环可展开为


(8)

(9)
这样定义Lyapunov函数为





所以控制器为全局一致渐近稳定的.
2 扰动力分析
开架式水下机器人在水下作业,主要受到来自脐带缆、机械手和海流等的扰动力.下文分别分析脐带缆和机械手扰动力的估计方法,以实现运动控制中的补偿.
2.1 脐带缆扰动力分析
在海流扰动条件下,脐带缆对开架式水下机器人有重要的非线性干扰.脐带缆在流体中的动力学模型可以描述为

(10)
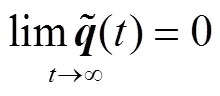
根据图2所示的受力状况,可以将脐带缆的扰动分为水面、水下和与机器人的连接点几个部分.

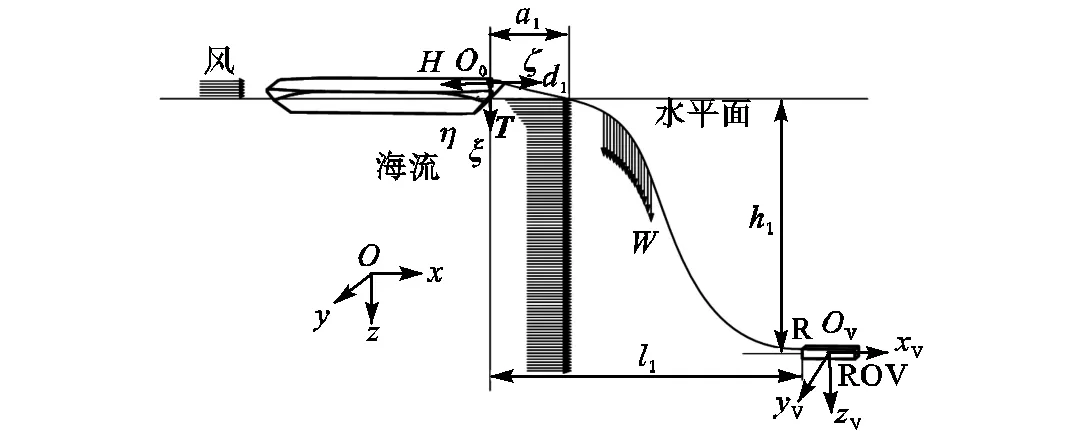
图2 脐带缆-开架式水下机器人模型
类似的脐带缆在水中有



(11)

(12)
2.2 机械手扰动力分析
如图3所示,在作业过程中机械手和开架式水下机器人之间的相互作用主要体现在两个方面:一是重心和浮心变化给机器人平台造成的恢复力矩;二是机器人和机械手之间的耦合作用力.
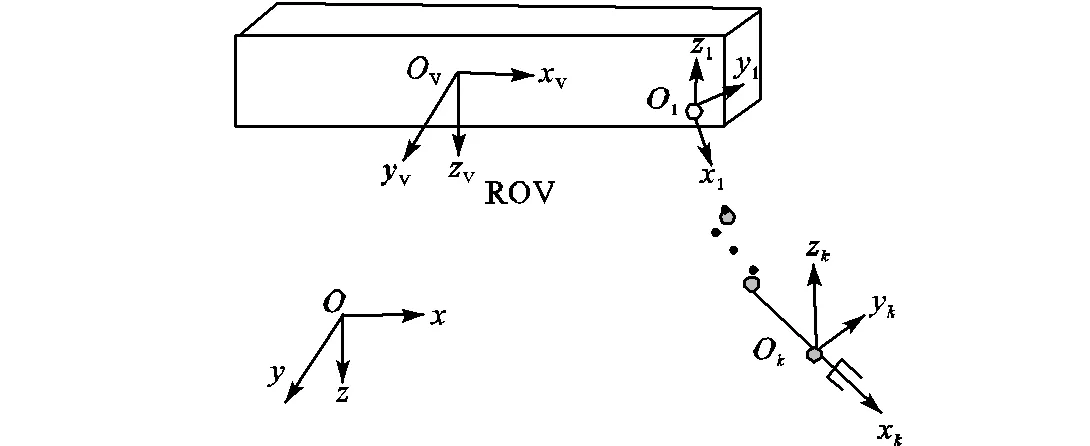
图3 机械手扰动力分析
机械手的运动给开架式水下机器人所造成的恢复力矩为

机械手的第+1个广义连杆相对于第个广义连杆的变换矩阵为
另一方面,水下作业时机械手和机器人遵循动量矩守恒.所以根据Newton-Euler方程,机械手的第个广义连杆所受的惯性力和力矩分别为


因此机械手对开架式水下机器人的干扰主要为恢复力矩和耦合作用力的总和,即
3 实验与分析
为了验证和分析所设计的控制器,在哈尔滨工程大学水下机器人技术重点实验室的综合水池(50,m×30,m×10,m)分别进行了轨迹控制和机械手作业的协调控制实验.用面控制方法[14](式(8))和本文提出的自适应抗扰方法(式(4))进行了对比得

实验平台为SY-Ⅱ开架式水下机器人平台(如图4所示,平台的水动力系数如表1所示).该机器人长1.3,m、宽0.8,m、高0.6,m,配有2个主推螺旋桨、2个侧推螺旋桨、2个垂推螺旋桨和1个具备两俯仰关节机械手,机械手相关参数如表2所示.脐带缆和机器人的固定点在机器人的艉部中点,所以脐带缆给机器人造成的横倾力矩为0,脐带缆相关参数如表3所示.
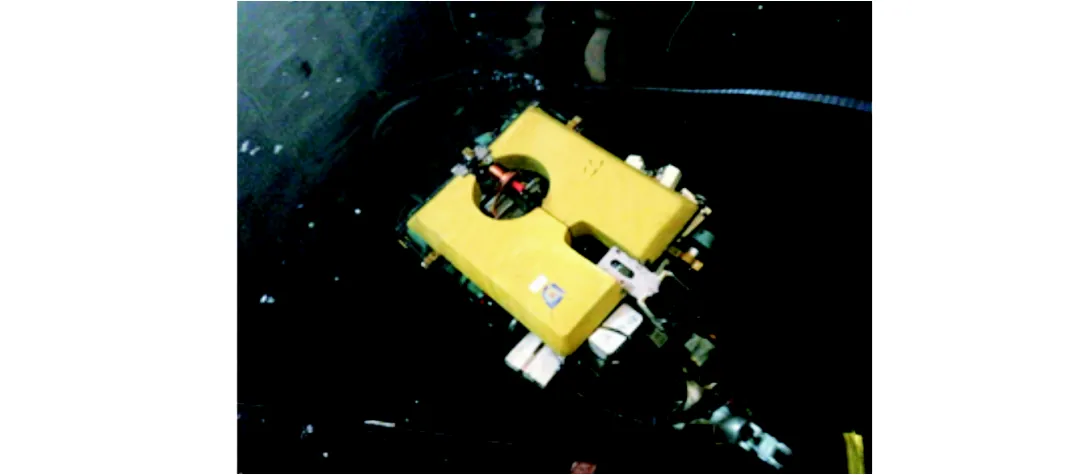
图4 SY-Ⅱ开架式水下机器人
它通过水面控制台向水下机器人嵌入式计算机发送控制指令,实现它的运动控制.
表1 水动力系数

Tab.1 Hydrodynamic parameters
表2 机械手相关参数
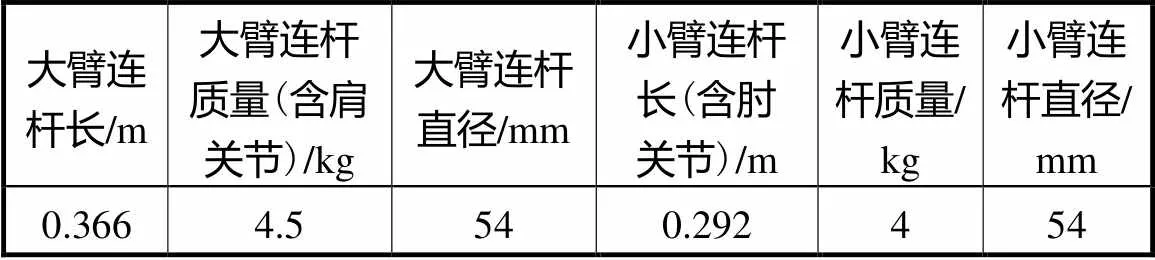
Tab.2 Parameters on the manipulator
表3 脐带缆相关参数

Tab.3 Parameters on the tether
文中首先进行了同时定深定向控制,在水面同时进行机器人的艏向控制和深度控制,目标艏向120°,深度3,m,如图5所示.机器人在水面下潜,同时到达期望深度和艏向姿态.和面控制相比,所设计的控制器基于模型和机器人的艏向、俯仰、和横倾等姿态实时估计了机器人所受到的脐带缆等扰动力,并通过自适应抗扰控制实时补偿,从而降低了控制误差,提高了收敛速度和控制精度.在路径跟踪过程中,机器人通过多普勒和磁罗经推算机器人的实时位置,分别跟踪了空间Z型曲线和空间螺旋线,虽然面控制也可以实现跟踪,但所设计的控制器根据机器人的三维姿态、航行速度实时估计机器人所受到的脐带缆等扰动力,通过自适应抗扰控制实时补偿,并在控制过程中不断比较期望路径和实际路径的误差,实现了更加精确的路径跟踪.
本文研究了控制器在水下机器人机械手作业过程中的姿态控制能力,在作业过程中机器人的姿态的稳定直接影响到机械手末端的作业精度和效率,所以作业过程中的姿态能力将较大提高机器人的悬停抓取和作业的精度和效率.图6(a)中,机械手的肘关节在水中进行俯仰运动,图6(b)中,机械手的肩关节和肘关节在水中同时进行俯仰运动,在机械手运动过程中,机械手的俯仰运动主要给机器人的俯仰姿态造成了影响.可从图6(c)和(d)中观察到肘部运动时机械手对机器人的扰动力和扰动力矩;图6(e)和(f)表示了肩-肘联合运动对机械手的干扰力和干扰力矩.由此可见,机械手的运动,尤其是肩-肘联合运动会对机器人产生较大的干扰影响.在协调运动控制中,机器人通过前后两个垂推进行姿态控制,抑制机械手影响的机器人俯仰运动,保持机器人的姿态平稳.在姿态控制过程中,所设计的控制器根据磁罗经得到的机器人俯仰、横倾和艏向等姿态角,机械手的各关节反馈角,实时估计机器人所受到的机械手扰动力,并进行补偿.和面控制相比,基于模型的自适应控制器因为能够估计到机械手的扰动力,所以机器人的姿态平稳,控制精度高.


4 结 语
脐带缆的拖曳力和机械手的扰动力会对开架式水下机器人的作业造成较大扰动影响,为使水下机器人以更稳定的姿态进行精确作业,本文针对开架式水下机器人设计了一种基于模型的自适应抗扰控制方法,该控制方法主要由全局运动学控制环和扰动力补偿项组成.文中通过系统动力学模型和Newton-Eulerian反向递推方法分别得到了脐带缆和机械手对水下机器人的扰动力模型,模型中包含机器人受到的海流扰动力、脐带缆的拖曳力及其产生的扰动力矩、机械手带来的耦合力(矩)和恢复力(矩).通过上述对两种扰动力的建模,建立了含有具体扰动力补偿项的自适应抗扰控制方法.进一步通过SY-Ⅱ开架式水下机器人进行实验验证,实验表明,相比于面控制,基于模型的自适应抗扰控制方法通过对扰动的实时补偿,在定深定向、路径跟踪的实验中,降低了控制误差,提高了收敛速度和控制精度.而在涉及机械手运动的水下机器人作业实验中,通过对机械手扰动的实时估计和补偿,基于模型的自适应抗扰控制方法在机器人的姿态控制上较面控制方法表现出更大的优越性.
[1] 徐玉如,肖 坤. 智能海洋机器人技术进展[J]. 自动化学报,2007,33(5):518-521.
Xu Yuru,Xiao Kun. Technology development of autonomous ocean vehicle[J].,2007,33(5):518-521(in Chinese).
[2] 吴家鸣,崔 寅,邓 威,等. 控制动作下带缆遥控水下机器人的水动力特性[J]. 华南理工大学学报:自然科学版,2012,40(4):150-157.
Wu Jiaming,Cui Yin,Deng Wei,et al. Hydrodynamic characteristics of tethered underwater robot under control manipulations[J].:,2012,40(4):150-157(in Chinese).
[3] 陈 巍,魏延辉,曾建辉,等. 水下机器人-机械手系统控制方法综述[J]. 重庆理工大学学报:自然科学版,2015,29(8):116-123.
Chen Wei,Wei Yanhui,Zeng Jianhui,et al. Review of underwater vehicle manipulator system control method [J].:,2015,29(8):116-123(in Chinese).
[4] Bian X,Qu Y,Yan Z,et al. Nonlinear feedback control for trajectory tracking of an unmanned underwater vehicle[C]//(2010). Harbin,China,2010:1387-1392.
[5] Bagheri A,Karimi T,Amanifard N. Tracking performance control of a cable communicated underwater vehicle using adaptive neural network controllers[J].2010,10(3):908-918.
[6] Antonelli G,Caccavale F,Chiaverini S. Adaptive tracking control of underwater vehicle-manipulator systems based on the virtual decomposition approach[J].,2004,20(3):594-602.
[7] 郭 莹. 水下自主作业系统协调控制技术研究[D]. 武汉:华中科技大学船舶与海洋工程学院,2008.
Guo Ying. Coordinated Control Technology of Underwater Vehicle-Manipulator System[D]. Wuhan:School of Naval Architecture and Ocean Engineering,Huazhong University of Science and Technology,2008(in Chinese).
[8] 彭生全. 水下机器人-机械手系统运动规划与控制技术研究[D]. 哈尔滨:哈尔滨工程大学机械与电气工程学院,2012.
Peng Shengquan. Research on the Motion Planning and Control for Underwater Vehicle-Manipulator System [D]. Harbin:College of Mechanical and Electrical Engineering,Harbin Engineering University,2012(in Chinese).
[9] Ismail Z H,Dunnigan M W. Redundancy resolution for underwater vehicle-manipulator systems with congruent gravity and buoyancy loading optimization[C]//2009. Guilin,China,2009:1393-1399.
[10] Han Jonghui,Chung Wan Kyun. Active use of restoring moments for motion control of an underwater vehicle-manipulator system[J].,2014,39(1):100-109.
[11] James C K,Yang Q J,Jonathan C H. Nonlinear dynamic model-based state estimators for underwater navigation of remotely operated vehicles[J].,2014,22(5):1845-1854.
[12] Sairam P,Bradley B. Dynamics modeling and control of a variable length remotely operated vehicle tether[J].,2005,2(2005):1255-1262.
[13] Mario A J,Jorge L B. Guidance of underwater vehicles with cable tug perturbations under fixed and adaptive control systems[J].,2008,33(4):579-598.
[14] 唐旭东,庞永杰,李 晔. 基于S 模型的水下机器人改进人工免疫控制器[J]. 大连海事大学学报,2008,34(1):49-53.
Tang Xudong,Pang Yongjie,Li Ye. S model-based improved artificial immune controller for autonomous underwater vehicle[J].2008,34(1):49-53(in Chinese).
[15] Montano A,Restelli M,Sacco R. Numerical simulation of tethered buoy dynamics using mixed finite elements computer methods[J].,2007,196(41/42/43/44):4117-4129.
[16] Tsai Lung-wen.[M]. New York:Wiley,1999.
(责任编辑:孙立华)
Adaptive Control Method of Underwater Vehicle Manipulator System Under Disturbances
Li Jiyong,Wan Lei,Huang Hai,Zhang Guocheng,Qin Hongde
(Department of Naval Architecture and Ocean Engineering,Harbin Engineering University,Harbin 150001,China)
Open frame underwater vehicles tend to be affected by the disturbances caused by manipulator,tether,waves and other factors.In order to reduce the influence of disturbances,in this article a model-based adaptive anti-disturbance control(AADC)method for open frame underwater vehicles was proposed.The models of disturbances caused by manipulator and tether was analyzed,and an AADC method in details based on global dynamic control loop and disturbances compensation terms was established.Experiments carried out on SY-Ⅱ open frame underwater vehicle to compare the AADC with the S surface control show that manipulator and tether indeed caused certain disturbances on the vehicle.The AADC method shows higher control accuracy through the estimation and compensation of disturbance in deep keeping,orientation keeping and path following experiments.When it comes to the position keeping experiments while the manipulator is at work,AADC method is robust against disturbance,hence generating smoother trajectory in vehicle motion and showing better stability performance than S surface control.
underwater vehicle;manipulator;tether;anti-disturbance control
10.11784/tdxbz201701015
TP242.6
A
0493-2137(2018)04-0413-09
2017-01-14;
2017-11-10.
李冀永(1992—),男,博士研究生,lijiyong@hrbeu.edu.cn.Email:m_bigm@tju.edu.cn
黄 海,huanghai@hrbeu.edu.cn.
国家自然科学基金资助项目(61633009,51579053,51209050).
the National Natural Science Foundation of China(No.,61633009,No.,51579053 and No.,51209050).
