基于离散自适应滑模控制的DC-DC变换器的设计与仿真
2018-04-07徐恒通王卫国
徐恒通,王卫国
(兰州空间技术物理研究所甘肃兰州730000)
开关电源是一种时变的非线性系统,传统的PID控制器是一种针对精确电路模型的线性控制器,而开关电源往往与其理想模型有差异,当电路参数或外界条件非设计范围时,控制效果不佳甚至不稳定。非线性控制理论中,变结构控制(Variable Structure Control,VSC)是一种根据现在的状态,使系统按照预定的滑动模态的状态轨迹运动,所以又称为变结构控制为滑动模态控制(Sliding Mode Control,SMC),即滑模控制。滑模变结构控制具有稳定范围宽、动态响应快、鲁棒性强、控制实现简单等优点,是所有用于DC-DC变换器的控制策略中鲁棒性最强的控制策略之一。滑模控制技术是设计具有鲁棒性的控制系统的一种有效控制策略,变结构系统的滑模控制具有极高稳定度和快速暂态响应速度[1-4]。数字DC-DC作为离散时间系统,受到控制器所采用的离散趋近律的参数以及采样周期的影响,系统会出现很大的振抖。离散滑模控制应用于双向DC-DC以及反激等拓扑中[5-6]。自适应滑模控制的设计无需不确定性以及外加干扰的上下界,并且能够有效的避免系统的振抖。除此之外,滑模控制对于PWM控制仍然存在一些问题[7]。近年来,滑模控制已经越来越多的应用到开关电源领域中[8-12],但是以单纯的Si-mulink对电路进行仿真,只能对相关电路参数进行粗略的配置。
单端正激电路具有电路拓扑结构简单、元减少、工作可靠性高等优点被广泛应用于中小功率的场合[13]。本文设计了一种基于离散滑模自适应控制的单端正激电路,由于数字控制开关电源的难以应用传统方式进行仿真,本文中采用simulink-saber联合仿真对该电路进行仿真以便于对控制部分的参数进行调整,并最终进行了实物验证。
1 离散滑模控制器的结构与原理
理论上,滑模变结构控制主要是针对连续系统,对于离散系统滑模变结构控制不能产生理想的滑动模态只能产生两种准滑动模态。离散滑模切换带[1]:

其中,两种准滑动模态包括有限步到达切换面,然后在其上运动的理想准滑动模态以及在一个定义的切换带内步步穿越切换面的非理想准滑动模态。
设离散的单端正激电路的状态方程为

其中J=[jn…j1],j1=1。
选取自适应离散趋近律:

其中,系统的收敛速度取决于q;与连续滑模控制相应的当s接近于0时,趋近速度为而不是0,可以保证时减少振抖;T为系统的采样周期。当增大qT,同时减小时,可以快速趋近的同时又能减小振抖。
联立式(1)~(4)可得到离散系统的控制律:

2 离散滑模控制器的设计
2.1 离散滑模面的设计
单端正激电路在一个完整周期内的状态方程为[14]:
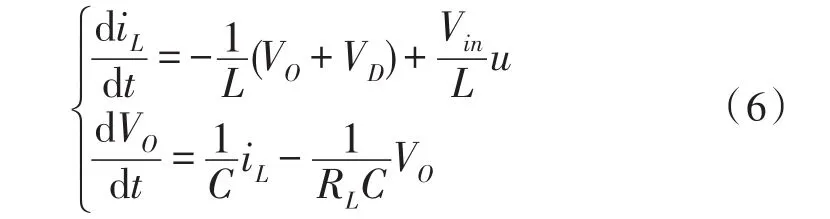
选择式(6)中两个状态变量作为线性组合滑模面:

其中,Vref为是电源输出的参考电压,iref是瞬时电感电流的参考电流,iref=k(Vvref-bVO)。
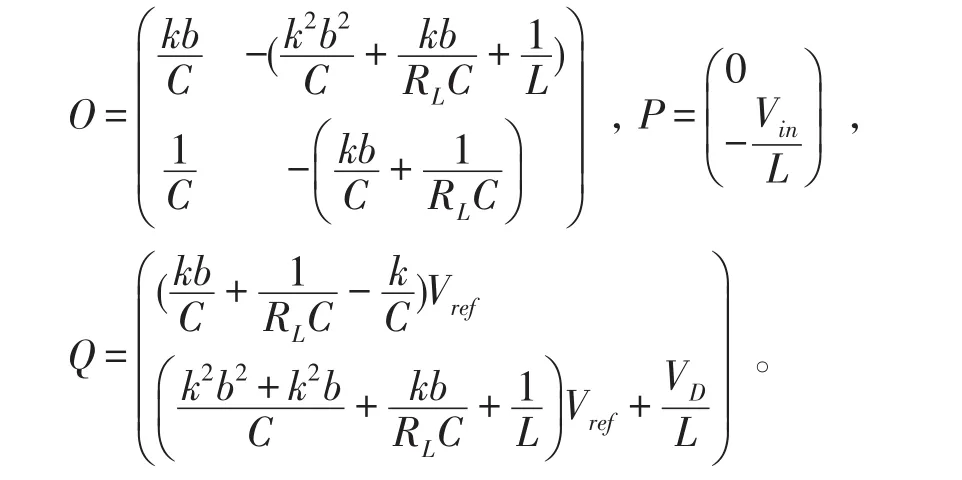
分解两个状态变量对系统对上式进行离散化,得到形如式(2)状态方程。
A=TO+I,B=TP,D=TQ
其中,I是n阶单位矩阵。
将上述方程代入式(5)可以得到单端正激电路的控制方程ueq。
2.2 离散滑模控制的参数设计方法
对于确定的DC-DC模块,其具有确定的输出参数,诸如功率P(W),输出电压范围Vo(V)。假设电源电压的稳定范围为(Vo-Δv)~(Vo+Δv),最大输出功率PMAX,通过对输出电压范围的分析可以得到一个输出电流的范围以及负载范围。如图1所示,该图为DC-DC模块的输出伏安特性曲线。
由式(3)可知

显然,S平面是一个通过额定负载点的直线。令S(k)=0可以得到

该式为S=0平面的表达式,是IL-Vo平面上的一条直线。如图1所示,图中作出该线,使其通过电源的最大功率输出点,以及额定输出点(Vref,Ios),并求出解析式:

将式(9)与式(10)进行对照,可以比较出λ、k、b的取值范围及公式。并且参考输出电压的范围与占空比的关系可以得到λ、k、b的取值。
3 电路的仿真
3.1 环境的搭建
Saber模拟及混合信号仿真软件是美国Synopsys公司的一款EDA软件[15]。它不仅适合于元件级仿真,也适合于系统级仿真。但是其并不能够很方便的对数字控制系统进行仿真。Simulink具有强大的控制系统仿真能力,本文结合Simulink在控制方面的优势以及Saber在电路细节上的优势对电路以及控制部分联合仿真。
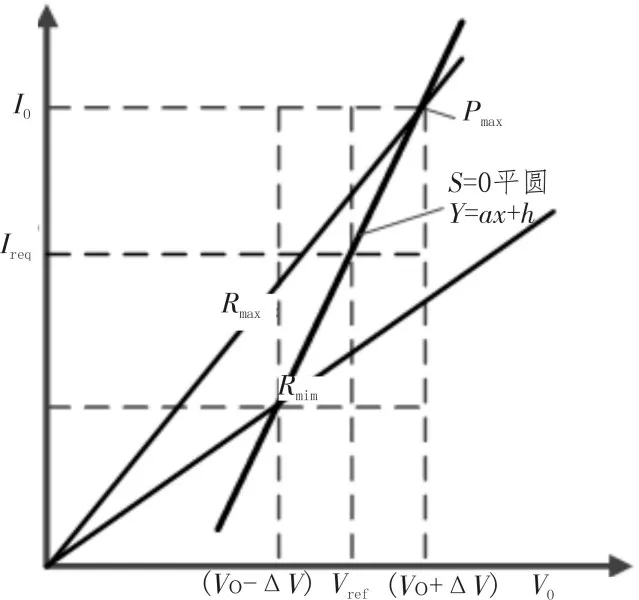
图1 DC-DC输出特性与S平面

表1 电路技术参数
如图2所示,根据表1所示的电路技术参数,对电路进行设计并在saber中搭建出相应的电路。单端正激电路通过谐振复位变压器进行复位,谐振复位所需的元件少、励磁能量循环利用等优点,非常适合在高频单端正激中使用[16]。该电路中加入Voltage to var模块、Var to voltage模块和Simulink co-sim模块。
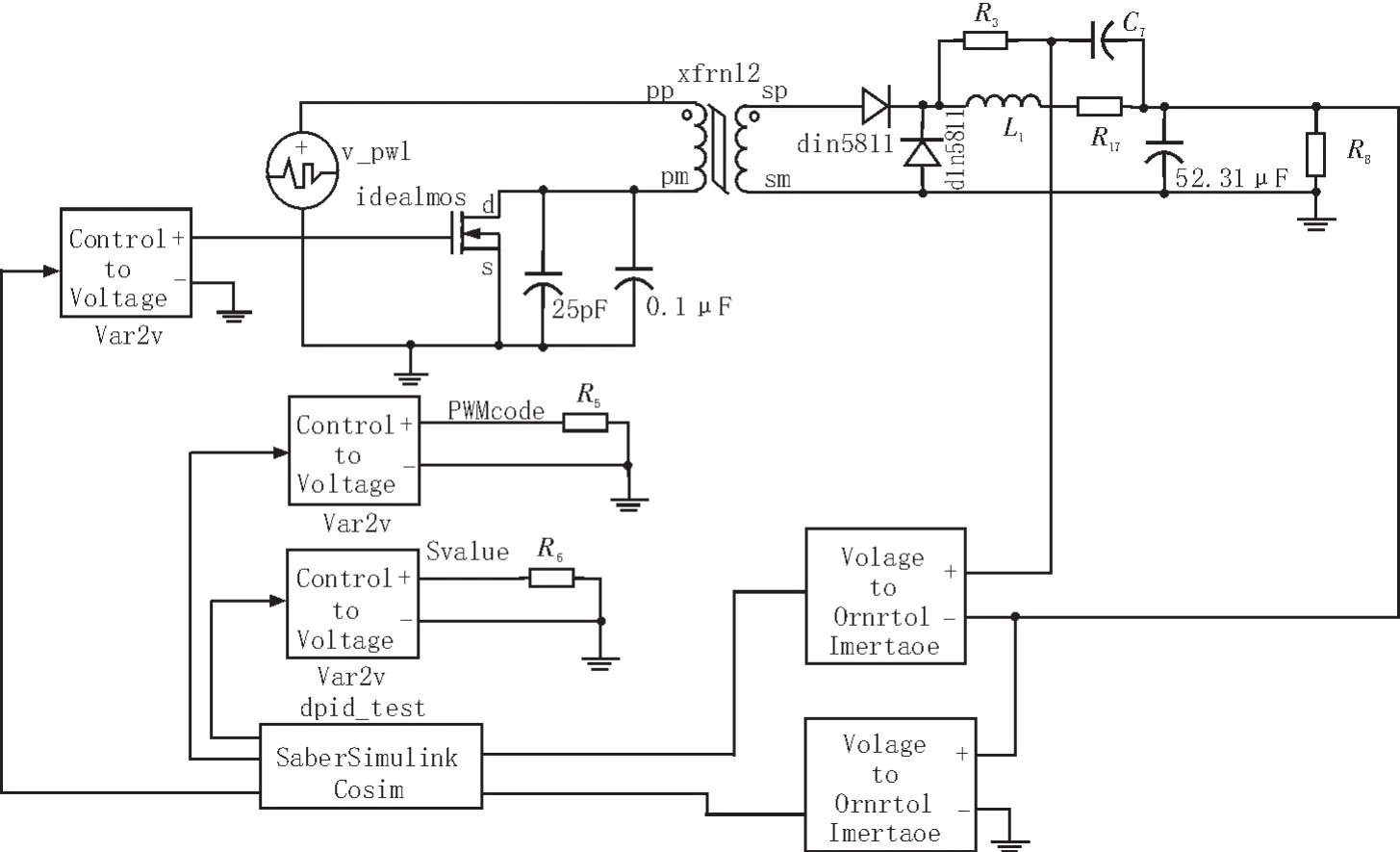
图2 saber中电路图
如图3所示,在Simulink中搭建出电路的控制部分。控制部分中需要调用联通模块Saber-Cosim模块来与Saber进行通信。控制部分包含滑模控制部分以及PWM产生部分。滑模控制部分通过编写S函数来对算法进行实现,由其产生一个占空比信号对调制PWM波形的宽度。PWM产生部分对滑模控制部分得到的控制字与一个斜坡信号进行对比,经过处理后输出为一个驱动MOSFET的PWM信号。控制部分输出的信号是一个[0,1 024]范围内的控制码。
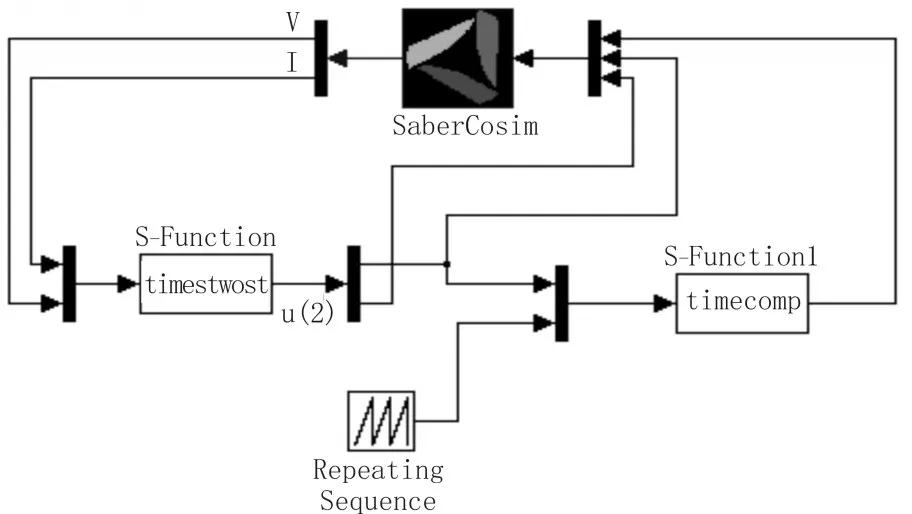
图3 Simulink中控制部分结构
3.2 仿真结果
控制部分的采样周期为周期为5.56 μs,进而对相关参数进行配置。本设计中按照电压的最大偏差不超过50 mV为例来实现电路功能。λ、k、b分别取-70.7、-4.5、1.444,按照所设计的参数对电路结构进行仿真。
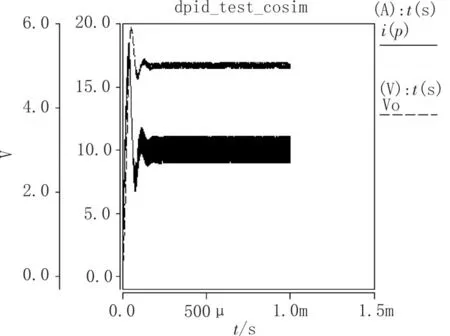
图4 稳态下输出电流与电压
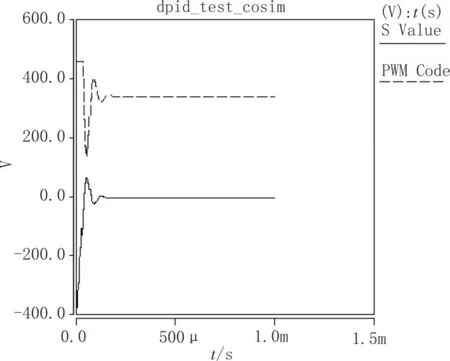
图5 稳态下PWM码与S值
在额载情况下加电时,电压建立时间为17.792 μs。如图4所示,输出电压与输出电流波形分别稳定于5 V与10 A。如图5所示,PWM控制码为368,S值稳定于0,系统达到稳定状态。
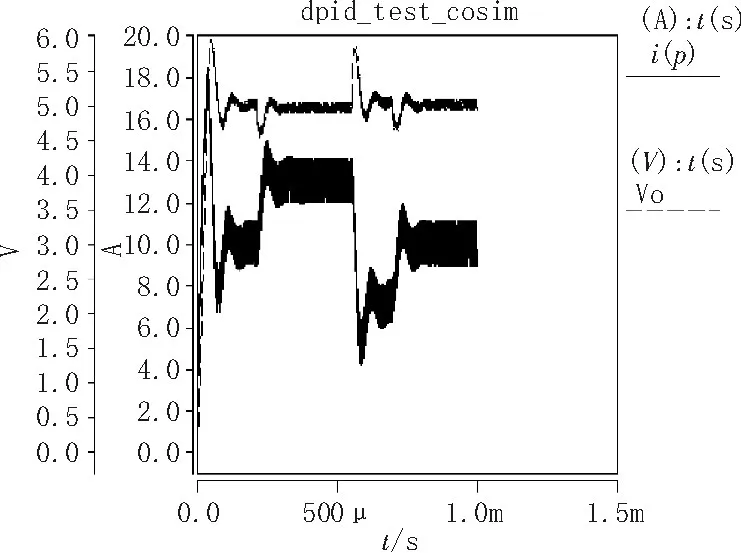
图6 负载变化时输出电流与电压
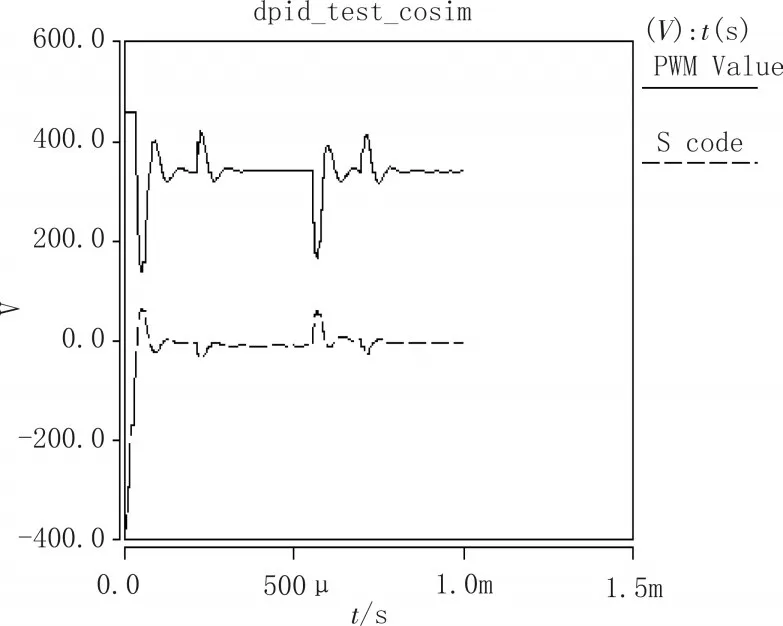
图7 负载变化时PWM码与S值
如图6所示,在215 μs时,电阻从额载0.5突变至最小值0.38,电路耗时55.7 μs重新建立平衡稳定于4.95 V。在555 μs时,电阻从最小值0.38突变至最大值0.7,电路耗时101.1 μs重新建立平衡稳定于5.1 V。在700 μs时,电阻从最大值0.7突变至额载0.5,电路耗时66.49 μs重新建立平衡稳定于5.0 V。可以从之前的仿真中可以看出滑模控制具有很好的鲁棒性。
4 应用实践
构建了基于FPGA[17-18]的离散自适应滑模控制的单端正激DC-DC实验平台,进行了实验研究。FPGA采用ALTERA cyclone IV系列的EP4CE15F17C8对电路进行控制。采用Verilog HDL编程语言对电路的控制部分进行编程。离散自适应滑模控制的单端正激DC-DC的实验结果与仿真结果良好的契合,并且也显示出了离散自适应滑模的控制方式具有很好的鲁棒性。
5 结束语
文中设计了一种基于离散自适应滑模控制的单端正激电路,在理论分析的基础上,通过仿真中充分验证了离散自适应滑模控制的控制性能。针对离散控制方法在仿真时难以准确仿真的问题,对其进行了Saber与Simulink的联合仿真[19]。在实验平台上对电路进行实验时,实验结果与仿真结果良好的契合,并且也显示出了离散自适应滑模的控制方式具有很好的鲁棒性。
参考文献:
[1]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2015.
[2]倪雨,许建平.准滑模控制开关DC-DC变换器分析[J].中国电机工程学报,2008,28(21):1-6.
[3]丁明亮.基于模糊滑模控制的Buck变换器[D].重庆大学,2013.
[4]周军,韩袁.基于滑模控制的低压大电流电源仿真研究[J].电源技术,2013(4):664-667.
[5]韩思亮,汤建新,马皓.双向DC/DC变换器滑模控制新方案研究[J].电力电子技术,2004(5):16-18.
[6]徐晓冰,戚枭宏,李冰,等.反激式DC-DC变换器滑模控制研究与仿真[J].中国农机化学报,2017(2):67-72.
[7]严宏举,冯全源.一种BUCK变换器附加积分定频滑模控制技术[J].电子技术应用,2015(6):121-124,128.
[8]孙文静.Buck型DC-DC变换器的滑模控制研究[D].北京:北京交通大学,2015.
[9]黄忻,汪健,陈宗祥,等.基于FPGA的比例积分滑模控制DC/DC变换器研究[J].电机与控制学报,2016,20(9):67-72.
[10]焦尚彬,刘晨,王俊辉.基于FPGA的开关电源模糊滑模控制器研究[J].电力电子技术,2014,48(4):31-33.
[11]孙鹤旭,张厚升.两并联双向DC/DC变换器的滑模变结构控制[J].电力电子技术,2016(5):4-8.
[12]汪健,葛芦生,陈宗祥.基于二重积分滑模控制DC/DC变换器的研究[J].电力电子技术,2015,49(11):17-18.
[13]张占松.开关电源的原理与设计[M].北京:电子工业出版社,2004.
[14]Tan S C,Lai Y M,Tse C K,et al.A Pulsewidth Modulation Based Integral Sliding Mode Current Controller for Boost Converters[C]// Power Electronics Specialists Conference,2006.Pesc'06.IEEE.IEEE,2006:1-7.
[15]曾伟,王君艳.车载逆变电源的Saber与Simulink联合仿真[J].现代电子技术,2012,35(12):186-188.
[16]张涌萍,肖波.一种新型谐振磁复位的单端正激变换器设计[J].科学技术与工程,2013,13(6):1626-1629.
[17]罗帅,徐进,夏杰,等.一种光纤数据采集系统的设计[J].西安工程大学学报,2016,30(3):312-315.
[18]陈彦丽,曹平,齐心成,等.CSNS-WNSC6D6谱仪读出电子学系统[J].现代应用物理,2017(3):74-79.
[19]曹雯,张云娟,宋倩文,等.气隙局部放电模型的Simulink仿真研究[J].西安工程大学学报,2017,31(4):495-501.