基于MTi系统的水声遥测技术研究
2018-04-07张庆国连莉
张庆国,连莉
(昆明船舶设备研究试验中心云南昆明650051)
水下航行体的当前姿态信息是其航行状态判断的重要参数,也是进行水下无人自主规划控制的主要信息来源。在其水下航行测试试验中,常采用水声遥测的方式进行航行姿态参数的实时测量,以获得航向角、俯仰角、横滚角、航深等当前姿态信息。为了实现水下航行体姿态参数的实时水声遥测,必须有效获得水下航行体的运动状态参数,然后通过水声通信的方式,在岸基实现多信息的实时获取与显示[1]。
1 水声遥测简介
通常情况下水下航行体安装有高精度的惯性导航系统,与内部的控制系统联合完成航行体的整体控制与机动。为了保证水下航行体的一致性和整体性,在水下航行测试中通常独立安装试验测试设备[2],专用于水下航行体的试验测试。另外,由于航行体上安装的试验测试设备体积较小,不能安装与航行体内部相似的高精度惯性导航设备,因此,需要采用简单可靠的测量方案,对其水下运动姿态信息进行实时测量,最后通过水声通信的方式将信息实时传送至岸基进行显示,以便对水下航行体的试验情况进行判定。
对于水下运动目标的姿态测量来说,多采用三维电子罗盘、光纤惯性测量[3]、MEMS惯性测量等系统或设备,实时获得水下目标的姿态信息。针对水下航行体中、高速航行状态下的实际使用条件[4],无法使用GPS等卫星导航及电子罗盘等设备。并且水下航行体的设备安装空间、环境及功耗均受到一定的限制,高精度惯性导航设备(如光纤惯性测量设备),虽然具备较好的测量精度和可靠性,但不能适用水下航行体试验测试的实际使用条件。具体比较情况见表1所示。
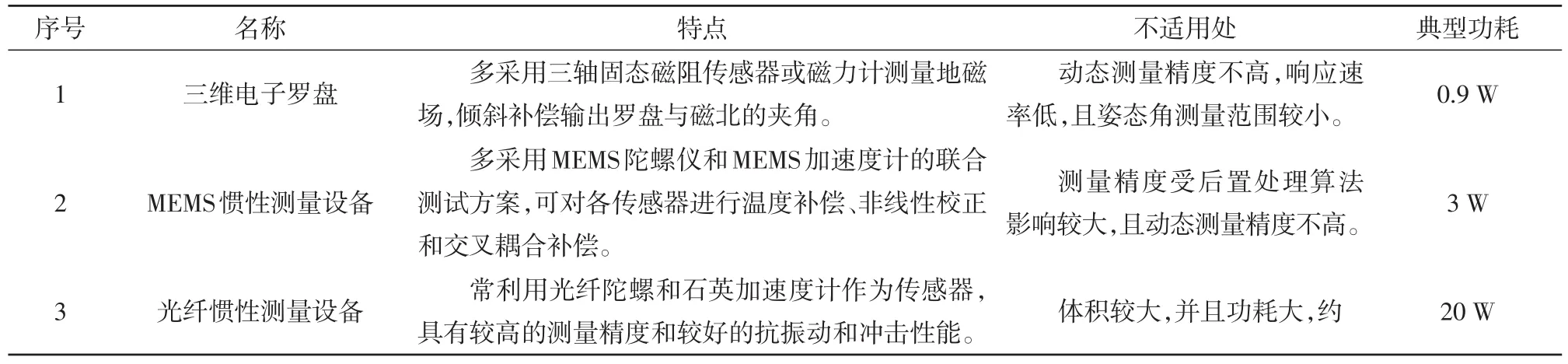
表1 姿态测量设备对比表
由表1可见,相比较来看,光纤惯性测量设备具有最高测量精度,且稳定性好,可实时获得水下航行体的姿态信息(也是水下航行体常用姿态测量设备)。但由于该设备体积较大,功耗大,且成本也较高,不适合水下航行体试验测试使用。荷兰Xsens公司生产的MTi(motion tracker instrument)系统[5],可在水下航行体中、高速航行状态下进行姿态信息的实时测量,具备全角度三维、体积小巧、功耗低、响应速率快等优点[6],满足水下航行体试验测试需求。
2 MTi系统简介
MTi系统(实物图见图1所示)采用三维陀螺仪快速跟踪被测物体的三维姿态,同时利用中间加速度和地磁场方向为系统提供可靠的测量参考,内部集成算法可将温度、三维安装误差以及传感器交叉轴影响进行实时补偿,为系统提供准确、可靠、及时和稳定的姿态输出。其主要能性指标如下[5]:
1)动态范围:三维所有角度;
2)角速度分辨率:0.05°;
3)静态精度(俯仰角、横滚角):不大于0.5°;
4)静态精度(航向角):小于1°;
5)动态精度:2°(RMS);
6)最大更新速率:512 Hz(校准数据),100 Hz(航向角数据);
7)功耗:0.36 W(航向角输出时);
8)模拟输出:0 V~3.3 V;
9)数字接口:USB/RS-232;
10)工作电压:4.5 V~15 V;
11)外形尺寸:58 mm×58 mm×22 mm(长×宽×高);
12)环境温度:0℃~55℃;
13)重量:50 g。

图1 MTi系统实物图
MTi系统初次使用时,需要在具体使用环境中进行多方向、多角度的校准设置,一旦校准完成便可投入使用。MTi系统在初始对准时,采用加速度计和磁强计对重力向量和地磁向量进行观测,得出载体的初始姿态角。利用当前数据来确定初始姿态矩阵,之后采用卡尔曼滤波对其测量数据,进行误差补偿。该方法对准速度快,误差不累积,在初始对准时无需水下航行体完全静止[7]。
在实际使用过程中需要对MTi系统坐标系进行转换,确保所测量的欧拉角[8]与水下航行体的姿态角坐标系相统一。另外,由于MTi系统中的三轴加速度数据中包含了重力加速度,因此如果使用加速度数值,需要相应减去重力加速度。在具体设计安装时还需考虑大功率电子器件(如功率放大器、FPGA)与MTi系统之间的相互干扰问题,相互之间安装距离尽量有一定距离,或采取相应的隔离与屏蔽措施。
MTi系统由三轴加速度计、三轴陀螺仪、三轴磁强计、温度传感器,以及A/D、DSP、FLASH、电源模块、接口等组成,其结构框图见图2所示。
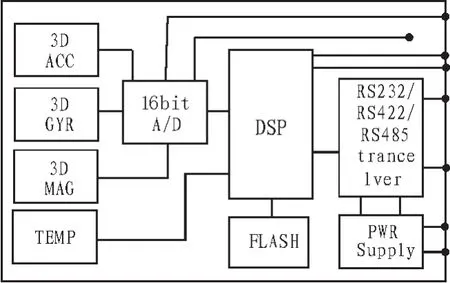
图2 MTi结构框图
MTi系统实时采集3D加速度计(ACC)、3D陀螺仪(GYR)、3D 磁强计(MAG)测量姿态数据,同时该数据既可以直接输出,也可以用于MTi内部物理传感器模型校准。利用加速度传感器来校准俯仰角和横滚角,利用地磁场数据校准偏航角,同时利用温度传感器(TEMP)进行航向角数据的补偿(温度传感器的测量范围是-55~125℃,精度为0.5℃)。当MTi周围有影响磁场的物体时,MTi会在10~20 s左右的时间内进行现场磁场数据的检测,以便确保航向角的测量精度。
由此可见,MTi系统可满足动态情况下,水下航行体姿态参数声学遥测的测量需求,符合水下航行体姿态遥测的小尺寸、低功耗、无需特殊校准等要求。一般情况下,水下航行体的运动姿态遥测精度不高,通常2°的精度便可对其航行状态进行判定和评估。如有更高精度要求,可采用其升级产品—MTi 100[9],该设备在运动状态下具备航向角1°、姿态角0.25°的更高测量精度。
3 基于MTI的水声遥测系统
水声遥测系统主要用于水下航行体实航试验时,姿态、航向等状态参数的实时水声获取,用于水下航行体实航试验整体功能测试及相应技术指标的检验与判定。水声遥测系统基于水声通信原理[10],利用水声调制编码信号将水下航行体状态信息传送至岸基显示。系统主要由安装在水下航行体的声源设备、水下声学基阵、岸基处理设备等组成。水声遥测系统原理框图见图3所示。
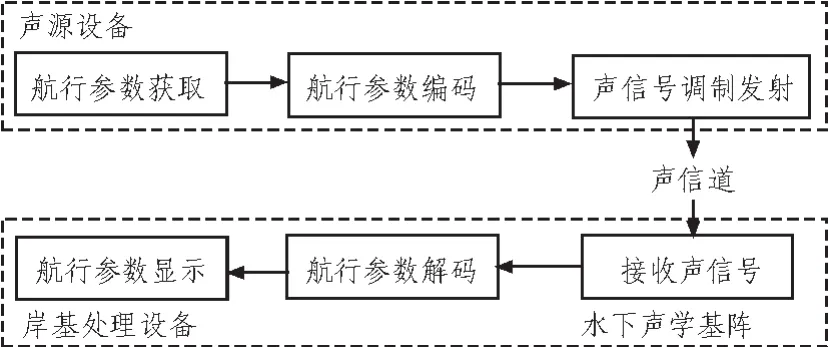
图3 水声遥测系统框图
MTi系统安装在水下航行体内(属于声源设备,见图4所示),负责完成水下航行体航行参数的实时获取。声源设备实时将深度传感器[11-15]、MTi系统的数据进行采集和处理,获得水下航行体的航深、航向、俯仰、横滚等状态信息,通过功率放大器和发射换能器将其编码后的声信号发射出去,水下基阵接收到该声信号后通过相应的信号处理,最终获得水下航行体的航行姿态信息。其时钟电路为统一时序所用,将航行体上声源发射信号与岸基处理系统进行时钟同步。另外,在设计固定位置时需要精确获得在航行体坐标系中的位置坐标,使MTi系统坐标系与航行体坐标系建立转换公式,以便进行航行参数的水声遥测。
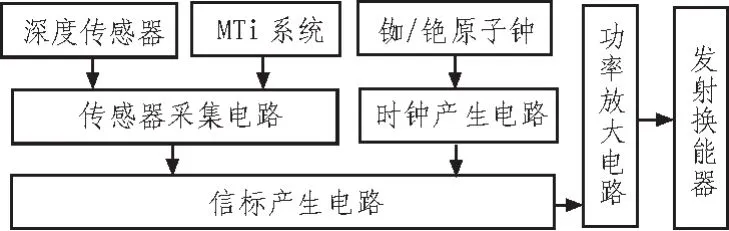
图4 声源设备原理框图
4 试验测试情况
水声遥测系统试验测试采用静态和动态两种方式进行,所谓静态为声源设备在水下为固定或漂悬/浮状态,而动态为声源设备安装在水下航行体上或水面船只上动态模拟的试验测试方法。对于整个水声遥测系统来说,其实际应用条件应是在水下航行体中、高速航行状态下的实航测试。为了模拟实际使用环境,利用MTi系统固定安装在试验船只上,实时将试验船只的姿态等信息调制在声源设备上,模拟水下航行体实航试验情况。水声遥测系统实时获得接近真实使用情况下的,水下航行体航行状态参数。该考核方式更加接近真实使用情况,具有较高的真实性。具体试验方法见图5所示。
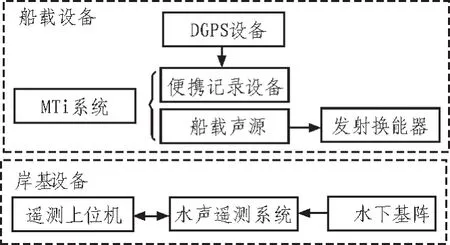
图5 试验测试框图
如图5所示,在船只试验测试时同时记录MTi系统的姿态、航行及DGPS数据,将该数据与岸基水声遥测数据进行对比分析(以MTi系统实时输出数据为基准),利用静态及动态测试的方式,获得其水声遥测航向角比对分析图见图6所示。
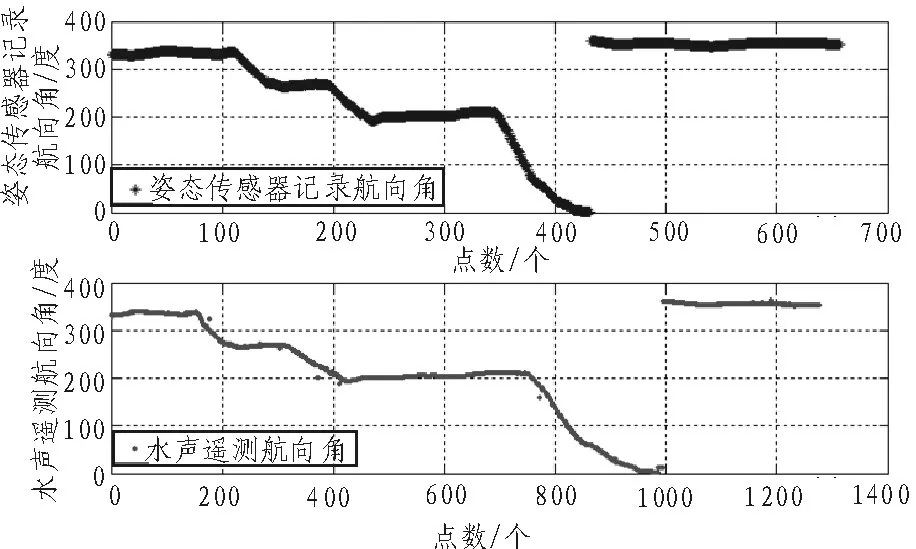
图6 航向角水声遥测比对图
图6中MTi系统实际的数据更新率可达100 Hz,但是由于本次动态船只实航试验,船载记录设备为了与船载声源同步,姿态传感器数据的记录周期与船载声源的大周期(4 s)相同。因此,姿态传感器数据和水声遥测数据个数不同,水声遥测周期为2 s,也就是说水声遥测数据约为姿态传感器记录数据的两倍。虽然两数据总量不同,但可从数据变化趋势中看出,实际MTi系统测量值与水声遥测值吻合。
经过动态与静态试验测试数据的统计分析,可知具体水声遥测试验的实际测量误码率见表2所示。其中姿态传感器跑船测试误码率为后期进行比对分析得出的实际测量误码率。从表2的统计结果可以看出,无论是静态、动态,还是MTi系统的实时动态测试,水声遥测误码率均小于10-3,能够满足水下航行体的常规试验测试需求。
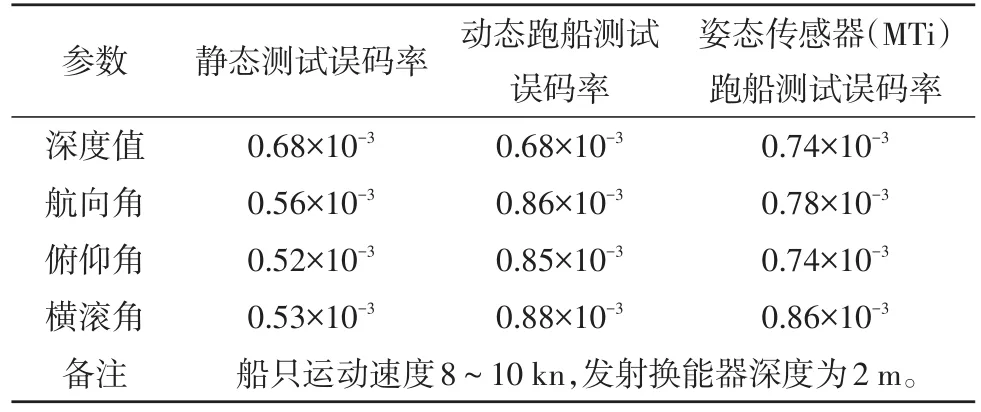
表2 水声遥测误码率表
5 结束语
水下航行体的运动状态参数如能实现水声实时遥测,将是对其实航试验测试手段的一大提升,可在岸基实时获得水下航行体的运动状态,针对其功能和性能进行测试和检验,无需常规试验结束后利用“内测”数据进行比对分析,具有直观、高效等优点。利用MTi系统的小尺寸、低功耗、高数据率等优点,安装在声源设备上,负责获得水下航行体的运动状态参数,为其水下航行体姿态及航向声学遥测提供一种可行的实施参考方案,具有较高的工程实用价值。
参考文献:
[1]张庆国,王健培.水下高速目标航行参数遥测技术研究[J].声学技术,2014(33):412-416.
[2]侯云山,蒋敏.无人水下航行器舷侧阵多目标探测技术[M].北京:电子工业出版社,2014.
[3]王鲁军,凌青,袁延艺.美国声纳装备及技术[M].北京:国防工业大学,2011.
[4]周德善,李志舜,朱邦元.鱼雷自导技术[M].北京:国防工业出版社,2009.
[5]MTi andMTx UserManual[M].Xsens,2006.
[6]MTi and MTx User Manual and technical Document Revision G.the Nertherland[M]:Xsens,2006.
[7]王磊.硅微航姿系统技术研究[D].哈尔滨:哈尔滨工程大学,2009.
[8]张玉磊,陈进.基于MTi系统的三维运动检测方法的研究[J].测控技术,2008(27):34-36.
[9]MTi100 Low-Level Communication Protocol Docu⁃mentation[Z].Xsens,2013.
[10]许天增,许鹭芬.水声数字通信[M].北京:海洋出版社,2010.
[11]高金锁,谢明,朱强.基于EKF的永磁同步电机的无传感器控制研究[J].电子科技,2017,30(12):55-58.
[12]滕志刚,朱华辰,白茹,等.巨磁阻传感器的温度补偿电路系统设计[J].电子科技,2017,30(12):17-20.
[13]宋水泉.基于DSPIC30微控制器的光电传感器设计[J].电子科技,2017,30(8):159-161.
[14]徐震,邵波,王云鹏.无线传感器网络分布式数据采集功率控制研究[J].电力信息与通信技术,2017(2):115-120.
[15]赵晨,贾光锋,陆文总.压电型分子印迹传感器对棉酚的检测[J].西安工业大学学报,2016,36(6):504-509.