隔膜计量泵三相异步电机转速跟踪控制
2018-04-07陈以恒顾煜佳王申健何德峰余世明
陈以恒,顾煜佳,王申健,何德峰,余世明
(浙江工业大学信息工程学院,浙江杭州310023)
泵在流程工业中具有十分重要的作用,近年来,引起了广大科技工作者和应用工程师的广泛关注和兴趣[1-2]。隔膜计量泵作为流体计量和精确投加的理想设备,广泛应用于石油、化工、环保、制药、食品、造纸、水处理等行业中[3],在工艺过程中主要担负着流体定量投加和比例投加(简称定比投加)的任务[4],笼式转子的三相异步电动机具有效率高、起动性能好、运行可靠、重量轻及性价比高等特点,所以在工业计量泵的驱动中得到广泛应用。虽然三相异步电机具有上述优点,但是工业现场,工作环境复杂多变,存在各种干扰,对其驱动电机能否有效控制直接关系到计量泵的精度。文献[5]提出采用计量泵变频控制系统,通过PID算法进行调节控制从而使系统更为稳定,提高计量泵精度。文献[6]运用基于模糊PI的控制方法对三相异步电机进行控制,该方法具有结构简单,稳定可靠等特点,缺点是未基于模型控制,所以无法实现优化控制。
近年来,随着控制理论和技术的深入研究,使得三相异步电机控制系统得到快速的发展。三相异步电机的数学模型是多变量非线性系统,通过引入反馈线性化的思想,经过坐标变换和状态反馈,将其状态空间模型转换成一个线性模型,再运用线性系统控制方法设计控制器进行控制。文献[7-9]考虑仿射输入非线性系统,以微分几何为处理工具,将非线性系统的控制问题转化为线性系统的控制问题。文献[10]运用反馈线性化的思想对异步电机的磁链和转速实现解耦控制,但这种调速方法动态性能不理想。文献[11]运用同样的线性化思想建立模型,再用线性系统极点配置方法设计控制器,对永磁同步电机的转速进行控制,这种方法改善了系统的动态性能,提高了抗干扰能力,但是系统存在稳态误差,使其稳态性能变差。
为解决上述问题,文中结合现代控制理论中极点配置思想和跟踪控制器设计方法,设计隔膜计量泵三相异步电机转速跟踪控制器。针对经坐标变换后的三相异步电机线性系统,利用跟踪误差信号增广线性系统,设计控制器,在提高系统动态性能的同时,改善转速跟踪精度。最后给出仿真结果,证实该控制方法的有效性和正确性。
1 三相异步电机输入输出反馈线性化模型
1.1 三相异步电机仿射非线性模型
在两相同步旋转坐标系(即d-q坐标系)下,假设dq轴已沿转子磁场方向定向,则有:
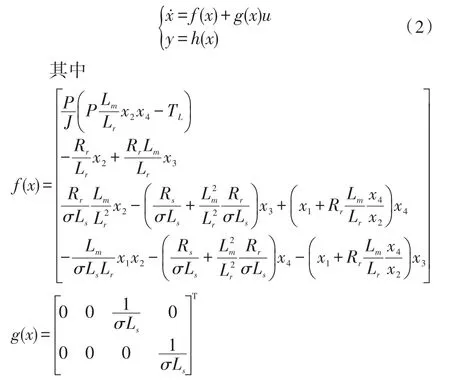
以转子电角速度、转子磁链和定子电流作为状态变量的三相异步电机的四阶状态方程[12]为:
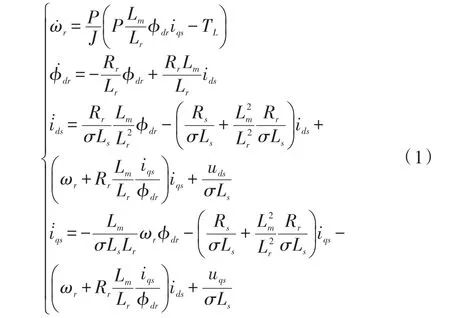
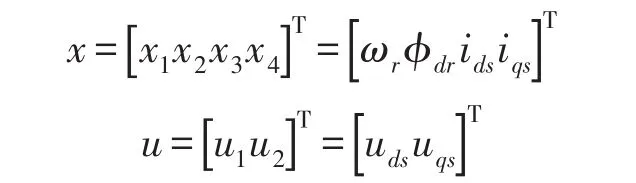
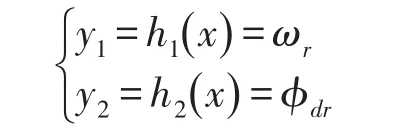
Rs,Rr分别为定子、转子电阻,Ls,Lr,Lm分别为定子、转子自感和定转子之间的互感,ωr为转子电角速度,uds、uqs为d、q轴定子电压,ids,iqs为d、q轴定子电流,φdr,φqr为d、q轴定转子磁链,TL为负载转矩,P为极对数,J为转动惯量,σ为漏感系数,d、q分别为电机磁场定向控制(又叫矢量控制)算法中Park变换的励磁分量和转矩分量直角坐标。取状态变量和输入变量分别为:
定义系统的输出为:
将(1)重新写成标准仿射非线性系统的形式:
1.2 反馈线性化
根据反馈线性化理论,首先对系统输出变量y1、y2求导,直到出现输入变量:
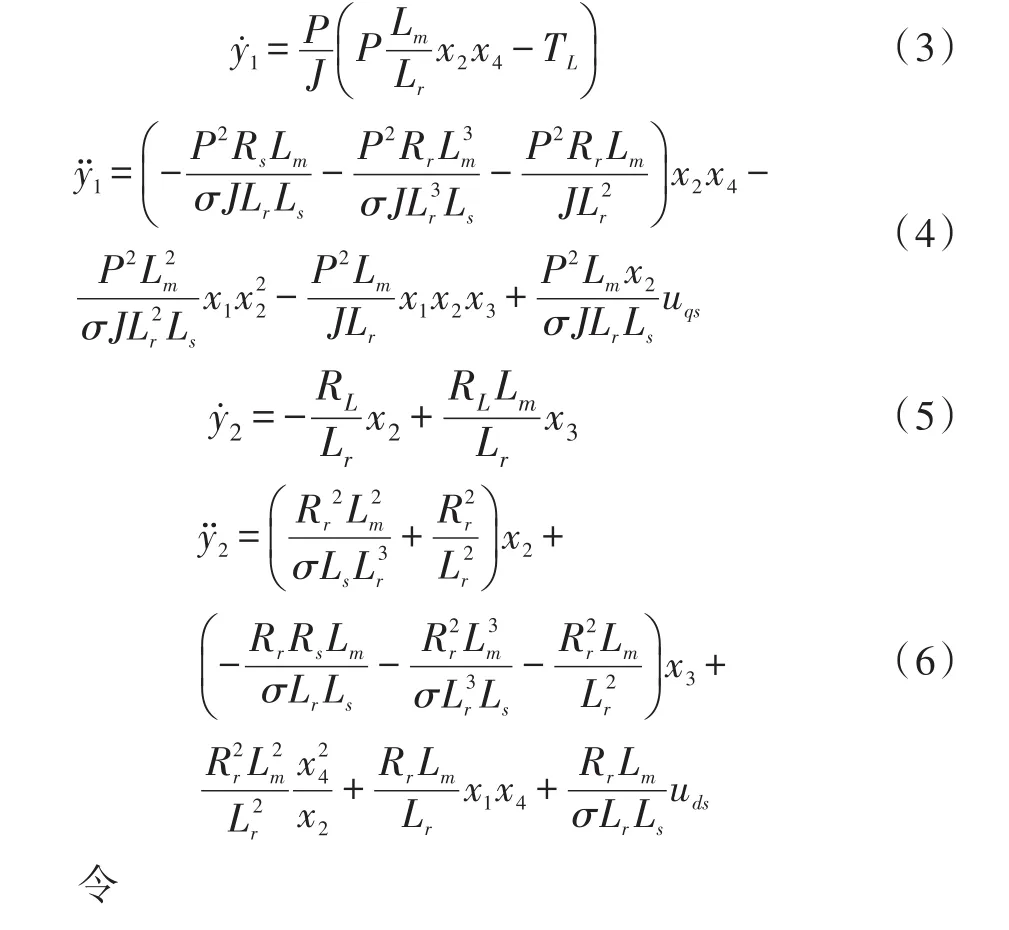
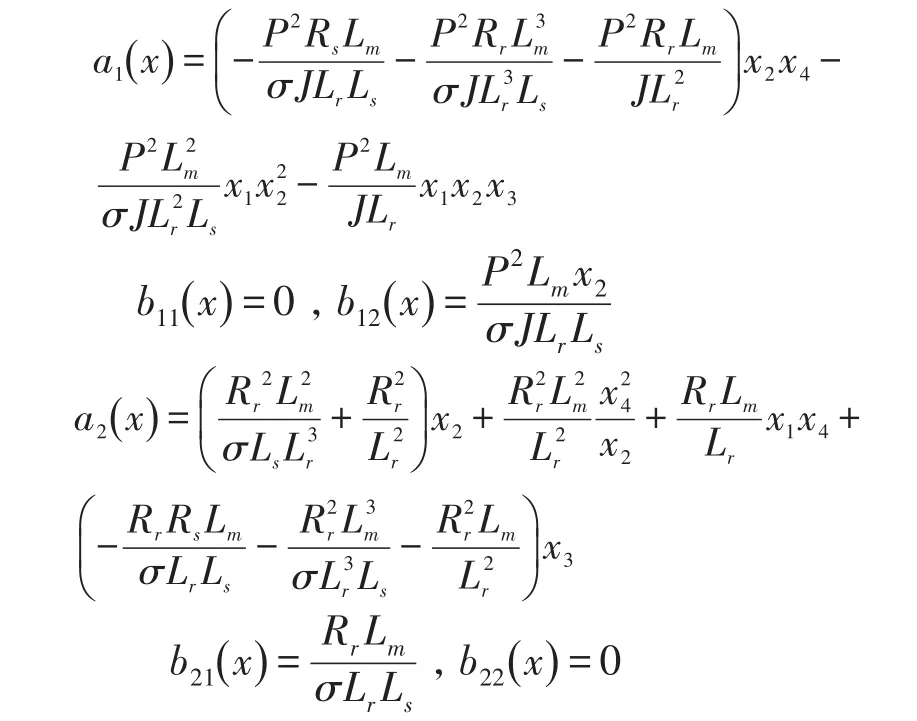
根据微分几何理论可得,系统输出变量y1,y2对于输入变量的相对阶分别为r1=2,r2=2可知系统的相对阶r=r1+r2=4,而原系统的阶次也为4。
与文献[13]不同,本文中系统的相对阶等于系统的阶次,因此不存在零动态问题,且满足反馈线性化的调节,设计控制器时不再需要做繁琐的稳定性分析。
取微分同胚变换,变换如下:
在上述坐标变换的基础上,通过引入非线性状态控制律,便可实现三相异步电机非线性系统的反馈线性化。
其中v=[v1v2]T为线性化系统虚拟输入变量。由式(8)可得到系统的非线性状态反馈:

根据(7)和(8),系统可以简化为:

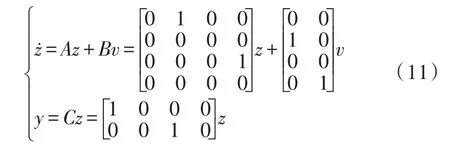
将系统重新写成状态空间模型:
2 三相异步电机转速跟踪控制器设计
运用控制理论中的状态反馈与极点配置[14,15]方法,对经过反馈线性化后的三相异步电机系统(10)设计控制器。对于状态空间模型(11),由于,等于系统的阶次,则系统(11)一定是能控的,因此该系统能通过状态反馈任意配置闭环极点。所设定的闭环极点可根据不同的性能指标进行修改。设计系统(11)的设状态反馈控制器为v=-Kz,其中K为极点配置状态反馈增益矩阵,其值由所配置的极点决定。
通过配置闭环极点,能改善闭环系统的动态性能,但可能使其稳态性能变差,会产生一定的稳态误差。考虑文献[16]中跟踪控制器的设计方法,本文通过在控制回路中增加r个积分器,其中r=rank(C),对极点配置后的系统设计跟踪控制器。
考虑增广系统的状态空间模型如下:
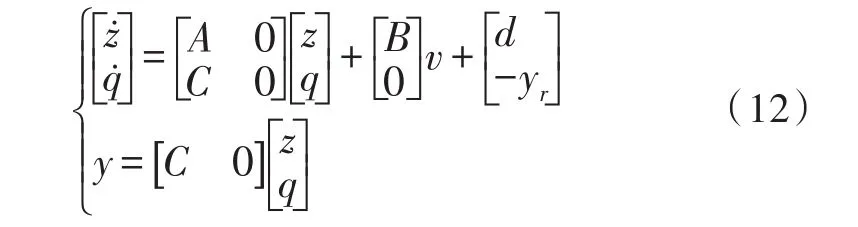
系统(12)中,q是r个积分器的输出。由于极点配置后系统是能控的,且矩阵的行列式不等于零,故,则增广系统是能控的。因此增广系统也能通过状态反馈任意配置闭环极点,对系统(12)设计状态反馈控制器为。
通过运用极点配置和跟踪控制器设计的三相异步电机的控制系统如图1所示。

图1 三相异步电机增广系统的状态反馈控制系统框图
3 仿真与结果讨论
为了验证所设计控制方法的正确性。本文在MatLab环境下对所建立的控制系统模型进行仿真,所提出的反馈线性化控制算法用C语言编写,仿真时的采样周期Ts=0.2 ms。三相异步电机控制系统参数如下:额定功率PN=1.5 kW,额定电压UN=380 V,额定电流IN=2.78 A,额定频率fN=50 Hz,额定转矩TN=7.45 N∙m,Rs=4.98 Ω,Rr=5.07Ω,Ls=0.532 H ,Lr=0.598 H,Lm=0.523 H,极对数P=2,转动惯量J=0.05 kg∙m2,nN=1 410 r/min,σ=0.5。
在验证极点配置方法的正确性时,将期望极点配置为λ1=[-2+4j-2-4j-5-6],运用MatLab工具计算出极点配置状态反馈增益矩阵,代 入控制器v=-Kz,观察系统的仿真输出结果。
图2为单一运用极点配置方法设计控制器的系统的输出仿真结果。图中实线表示磁链φdr,虚线表示转速ωr。
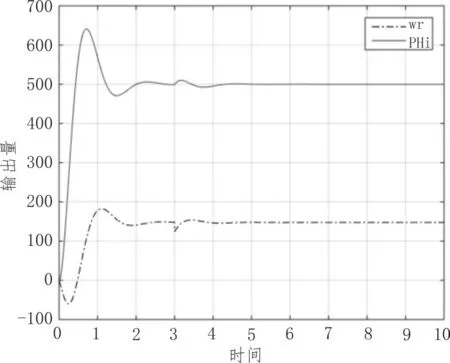
图2 经极点配置后的系统运行状态
达到稳态时的电机转速为147.434rad/s,磁链为499.834 Wb。可见存在一定的稳态误差,为了改善系统的稳态性能,笔者构造了三相异步电机的增广系统,在极点配置的基础上加入跟踪控制器的设计,对其设计控制器。
对增广系统配置极点为
λ2=[-2+4j-2-4j-5-6-10-20],同理可求出K=[K1K2],其中K1和K2的值如下:,将结果代入控制器,观察仿真结果。

使用该控制器的系统输出仿真结果如图3所示:
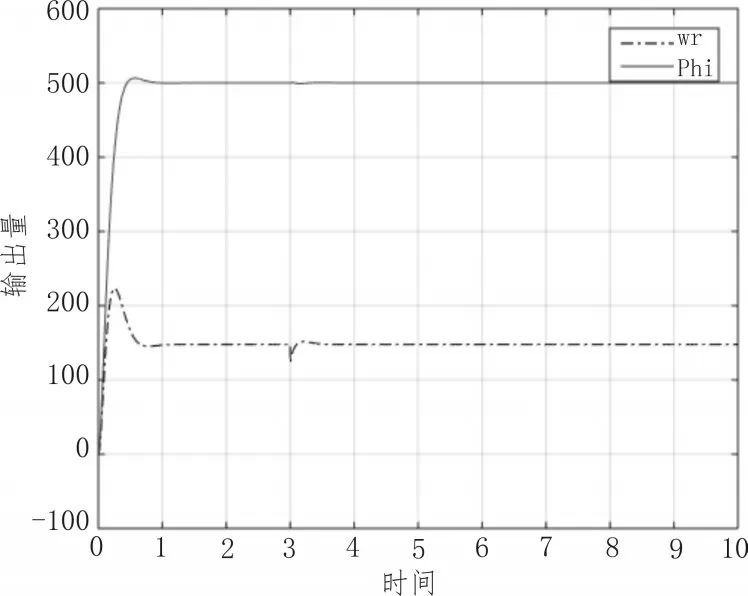
图3 极点配置后加入跟踪控制器的系统运行状态
达到稳态时的电机转速为147.716rad/s,磁链为499.943 Wb。通过上述分析,可知本文提出的控制方法与单一使用极点配置方法设计的控制器相比,减少了系统的稳态误差,使系统具有更加好的抗负载扰动性、动静态性能以及鲁棒性,有助于提高计量泵在复杂环境下运行的稳定性。
4 结论
文中从转子面向磁场定向控制的三相异步电机模型出发,运用直接反馈线性化的理论得到状态反馈,实现了系统的输入-输出线性化。然后根据现代控制理论中极点配置和跟踪控制器的设计方法,设计了虚拟控制器,最后得到了三相异步电机的转速控制器。仿真结果表明,文中提出的控制方法相比于单一的极点配置方法,减少了系统的稳态误差,当存在负载扰动和参数变化时,在保证系统闭环稳定的条件下,具有更好的动稳态性能和鲁棒性。且控制器的参数可根据实际性能指标进行调整,适用于隔膜计量泵对电机驱动系统和控制精度要求高的工业现场。
参考文献:
[1]段未,马国远,周峰.多回路泵驱动回路热管系统的换热特性[J].CIESC Journal(化工学报),2017,68(1):104-111.
[2]马跃征,马国远,张双.磁力泵驱动两相冷却环路的换热特性[J].CIESC Journal(化工学报),2015,66(11):4388-4393.
[3]Yu Shiming,Wu Jiangjiang,Zhang Duan.Robust non-fragile PID controller design for the stroke regulation of metering pumps[J].Chinese Journal of Chemical Engineering.2011,19(1):83-88.
[4]陈雨田,黄晓斌,陈震,等.计量泵、磁力泵、高速泵和增压泵的应用介绍与市场发展[J].化工设备与管道,2006,43(6):35-38.
[5]张悦.高精度隔膜计量泵的研制[J].水泵技术,2012(2):8-11.
[6]朱智勇,余世明,施金培.基于模糊PI控制的三相异步电机simulink建模与仿真[J].机电工程,2012,29(1):53-57.
[7]孙志毅.非线性系统控制理论与方法[J].太原重型机械学院学报,2003,24(4):249-253.
[8]ALD Franco,H Bourles,ER De Pieri,et al.Robust nonlinear control associating robust feedback linearization and H∞control[J].IEEE Transactions on Automatic Control,2006,51(7):1200-1207.
[9]Gao L,Chen L,Fan Y,et al.A nonlinear control design for power systems[J].Automatica,1992,28(5):975-979.
[10]宋文超,林飞,张春朋.基于定子磁链模型的异步电机反馈线性化控制[J].电工技术学报,2003,18(4):85-88.
[11]孟昭军,孙昌志,安跃军,等.状态反馈精确线性化永磁同步电动机转速控制[J].电机与控制学报,2007,11(1):21-28.
[12]李洁,孔维超,钟彦儒.一种不引入零动态的异步电机反馈线性化控制[J].电工技术学报,2014,29(1):110-115.
[13]郭春平,王奔,赵岳恒.异步电机反馈线性化解耦控制[J].大电机技术,2014(4):31-37.
[14]卢京潮.自动控制原理[M].北京:清华大学出版社,2013.
[15]吴麒,王诗宓.自动控制原理[M].北京:清华大学出版社,2006.
[16]俞立.现代控制理论[M].北京:清华大学出版社,2007.