IVS-179毫米波雷达测试系统的研究
2018-04-07袁战军
商 莹,李 焕,袁战军
(1.陕西国际商贸学院陕西咸阳712046;2.北京市第八中学北京100071)
雷达系统在军事领域、民用领域等均有着重要的作用。因此雷达系统伴随着科技的发展在不断的进步,用于雷达测试的雷达测试控制系统也需要不停的更新换代[1]。
高性能的雷达测试控制系统有助于更加快速、精确地测试目标距离和速度。
本系统中采用了VS-179毫米波雷达传感器,该传感器能够探测运动目标速度,辨别运动目标方向,尤其适用于探测静态或动态目标的距离信息,应用该传感器设计的毫米波雷达测试系统能够更快速、准确地进行对目标的测量。
1 系统组成
IVS-179毫米波雷达测试系统由调制信号模块,测量模块,信号调理模块和信号采集模块组成,系统框图如图1所示。
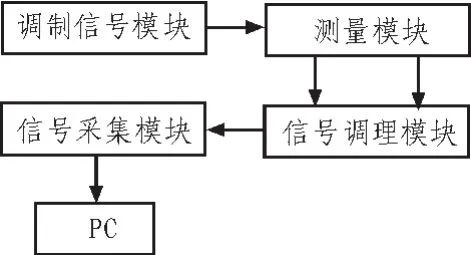
图1 系统组成框图
调制信号模块电路中所需的三角波信号由数据采集卡的DA输出口产生,为一个100 Hz~1 kHz的三角波或锯齿波信号,低电平为0.5 V高电平不能超过10 V,三角波的幅值决定了传感器线性调频信号的发射带宽。
输入调制电压由传感器内部的压控振荡源(VCO)转化为线性调频的发射信号,此发射信号频率随调制电压线性变化。完成毫米波信号的发射。
信号的调理模块电路主要包含电压跟随、信号滤波、信号放大3个部分,最后放大的信号经过数据采集卡采集回后经上位机进行处理。
2 毫米波原理
IVS-179毫米波雷达[2]测试系统中主要使用毫米波进行测距和测速,当使用毫米波进行测距时,Vtune端输入的调制信号为三角波或锯齿波,输入调制电压由传感器内部的压控振荡源(VCO)转化为线性调频的发射信号,此发射信号频率随调制电压线性变化。
由于收到的回波信号与发射信号有一定时延,在此时延上发射信号与回波信号的差频就对应目标的距离。对输出的差频信号进行滤波放大处理后,由FFT变换可得到这一信号的频率,即可求得目标距离。采用三角波调制的FMCW(可调连续波雷达)雷达[3]系统的发射信号和回波信号时频曲线以及对应的差频信号时频曲线如图2所示。
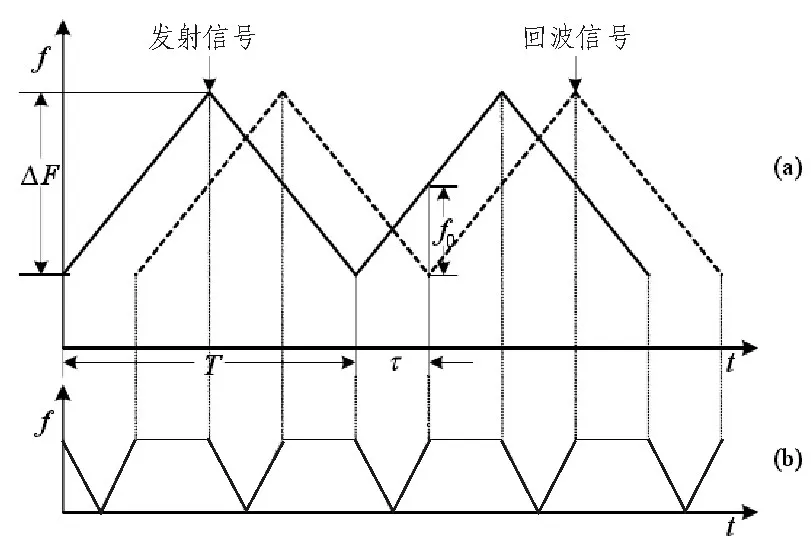
图2 FMCW雷达发射和回波信号时频曲线及对应差频信号视频曲线
当使用毫米波进行测速时,Vtune端输入的调制信号为固定直流电压信号,雷达发射信号的频率不变,由于目标运动而产生的多普勒效应会使回波的频率产生相应变化。回波信号与发射信号的差频即对应目标的速度,而目标的运动方向由两路输出信号的前后相位关系即可确定。由频率和两路输出信号的前后相位关系,即可求得目标的运动速度并辨别目标运动方向[4-5]。
3 IVS-179毫米波雷达传感器原理
采用IVS-179毫米波雷达传感器,可用于探测固定目标的距离,作用距离可达300 m到500 m,运动目标速度并辨别目标的运动方向,尤其适用于探测静态或动态目标的距离信息,采用24 GHz双通道K波段雷达传感器作为前端测速传感器,取得I、Q两路信号后,通过信号采集器将采集的数据发送给上位机进行分析处理[6-8]。
4 系统电路
IVS-179毫米波雷达测试系统的电路部分主要包含电压跟随部分、信号滤波、信号放大3部分组成。由于IVS-179毫米波雷达传感器采集回的I路、Q路信号十分微弱,不能直接做后续的滤波和放大处理,因此需要先经过电压跟随电路,增强信号的驱动能力,便于后续的滤波和放大[9-10]。电压跟随部分的电路如图3所示。
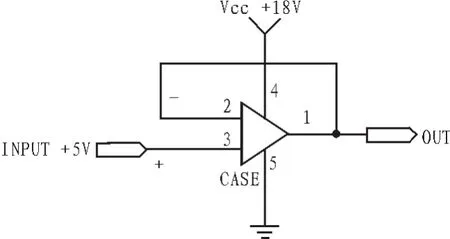
图3 电压跟随电路
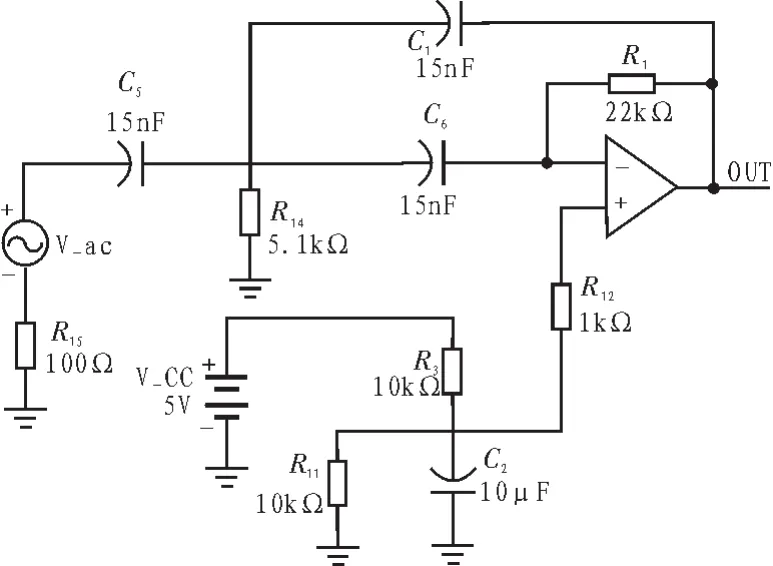
图4 1 kHz高通滤波电路
经过电压跟随器后,需要对信号进行高通滤波,用来滤掉低频的三角波调制信号,便于后续进一步放大处理,系统中采用1 kHz的高通滤波电路[11-13],其电路图4所示。
最后,为了便于采集卡的电压采集,需要对信号进一步做放大处理,满足AD的电压采集要求。本设计中采用的放大电路为常见的比例同相运算放大器[14-17],其电路图5所示。
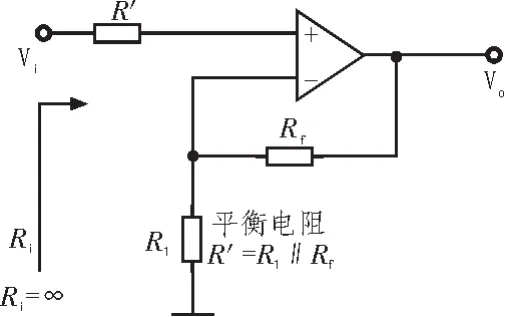
图5 同相比例放大器电路
由于毫米波雷达传感器的输出具有一定的噪声干扰,因此需要首先进行滤波,然后进行放大,否则,噪声也会被进一步放大,对后续的数据处理造成一定的干扰。其次,本系统中所有的运放芯片均应当考虑低噪声的要求,采用低噪音芯片可大大减少芯片本身产生的附加噪声,有利于后续数据的处理。
5 测试条件及测试结果
系统测试时采用0.5~4 V,频率为200 Hz的三角波调制信号,信号采集卡的采样率为50 k/s。当测试点目标的距离较远时,由于雷达墙壁对雷达回波具有一定的干扰,因此测试时尽量选择在空旷的室外进行,同时,在测试进行时,采用了将目标架在高处,采用大仰角的方式测量。可以有效避免背景墙壁等对雷达回波造成影响。测试进行时的测试效果如图6所示。

图6 测试进行时的测试效果图
实验场地选在较为空旷的楼顶进行,通过较大的仰角可以有效避免墙壁以及其他建筑物的干扰。其中雷达与目标的实际距离,可以通过勾股定理较为容易的求得。测试得到经过放大的波形和计算机的处理效果如下:
测试1:测试条件为雷达和目标高度差2 m,水平距离10 m,实际距离10.2 m,测试中雷达输出波形和经测试系统测得回波经过FFT变换结果如图7所示。
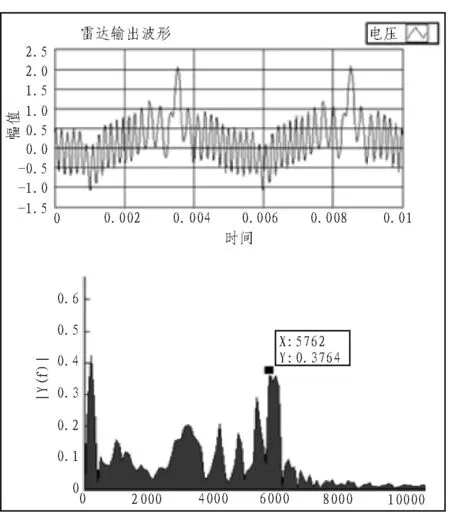
图7 雷达输出波形图和系统测得回波数据经过FFT变换结果
测试2:测试条件为雷达和目标高度差为2 m,水平距离12 m,实际距离12.1 m,测试中雷达输出波形和经测试系统测得回波经过FFT变换结果如图8所示。

图8 雷达输出波形图和系统测得回波数据经过FFT变换结果
测试3:测试条件为雷达和目标高度差2 m,水平距离18 m,实际距离18.1 m,测试中雷达输出波形和经测试系统测得回波经过FFT变换结果如图9所示。
通过表1对上述3种情况下对IVS-179毫米波雷达测试系统测试结果的分析得出,所有测得结果均有正向误差,经过对系统及测试结果数据分析得知存在误差的主要原因有线性调频在所选取的电压段不是完全线性和调频带宽有误差,在0.5~4 V调频时,真实的频带宽度可略小于理论的200 M,造成测量结果普遍偏大。再进一步的测试及分析中,通过研究得出减小正向误差的解决方案,其一为测得0.5~4 V调频时的真实频带宽度取代理论计算出的200 M,其二为进行一定程度的非线性补偿,通过解决方案在上述3种同样的情况下测得的数据分析结果后得到测量误差分别为0.011、0.015、0.015。

图9 雷达输出波形图和系统测得回波数据经过FFT变换结果
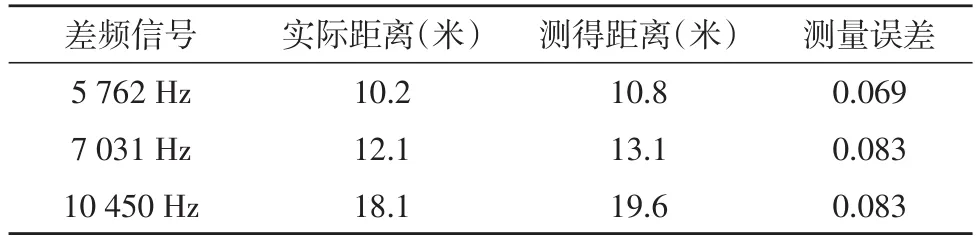
表1 3种情况下测得数据分析结果
6 结 论
IVS-179毫米波雷达测试系统的设计解决了对目标的快速、准确测量问题,系统能够应用于工业、医疗、交通等方面,通过对实验测得数据的分析及对系统进行的一系列改进后系统的测量精度显著系统,测量误差约为0.01,对存在的误差会在后续的研究中继续提出系统的改进措施,尽量减小误差,使系统的测试结果更加精确。
参考文献:
[1]喻江波.毫米波雷达对电力线检测的关键技术研究[D].南京:南京理工大学,2015.
[2]宗蓉.毫米波雷达对云宏微观特性的探测和研究[D].南京:南京信息工程大学,2013.
[3]柯振宇.基于毫米波雷达的车辆向碰撞预警系统设计[D].武汉:武汉理工大学,2014.
[4]张小红.浅谈毫米波雷达研究及应用[J].现代导航,2013(4):270-274.
[5]毛茅,李玉书.毫米波宽带成像测量雷达及其关键技术研究[J].飞行器测控学报,2015:42-47.
[6]彭刚锋,崔强,王国东.新一代测试总线标准—AXIe综述[J].测控技术,2012(7):6-9,19.
[7]刘华军,赖少发.汽车毫米波雷达目标跟踪的快速平方根CFK算法[J].南京理工大学学报,2016:56-61.
[8]骆云志,雷雨能.基于毫米波雷达和CCD摄像机信息的D-S融合方法[J].数据采集与处理,2014,29(4):52-58.
[9]程蕾,基于毫米波雷达和机器视觉的夜间前方车辆检测研究[D].长春:吉林大学,2016.
[10]戴作宁.毫米波雷达高速运动目标精确测速研究[D].南京:南京大学,2016.
[11]刘曰.基于组合毫米波雷达的智能车环境感知方法[D].烟台:烟台大学,2016.
[12]胡彬.基于毫米波雷达的车辆防碰撞预警[J].微型机与应用,2016:48-54.
[13]祝大同.基板材料在车载毫米波雷达中应用及技术进展[J].印制电路信息,2016:67-72.
[14]严思宁.基于信息融合的智能车辆前方目标识别技术研究[D].南京:东南大学,2015.
[15]张亚婷.毫米波多普勒雷达收发前端关键技术研究[D].成都:电子科技大学,2015.
[16]宋平.毫米波雷达天线测试系统的研究[D].沈阳:沈阳航空航天大学,2015.
[17]高振海,王竣,佟静,等.车载毫米波雷达对前方目标的运动状态估计[J].吉林大学学报,2014,44(6):1537-1544.