基于无线通信的汽车后视镜控制系统
2018-04-04宋传旺孙凡晴韩悦李恩玉吴则举谢帅虎
宋传旺 孙凡晴 韩悦 李恩玉 吴则举 谢帅虎
摘 要: 目前减小后视镜视野盲区是提高驾驶员行车安全的重要措施。利用无线通信技术设计了汽车后视镜控制系统,发射端采用方向盘转角传感器采集方向盘的转角数据,用NRF24L01模块实时发送数据;接收端采用NRF24L01模块对数据进行无线接收,利用STM32进行数据处理后,控制后视镜控制端的电机转动,使后视镜自适应地调整到最佳位置。经过测试分析后得出,采用无线通信技术的方式实现了汽车后视镜的自适应调整,减小了驾驶员行车过程中后视镜视野盲区。
关键词: 后视镜控制系统; 无线通信技术; 方向盘转角传感器; 数据采集; 数据处理; STM32
中图分类号: TN911?34 文献标识码: A 文章编号: 1004?373X(2018)07?0004?04
Automobile rearview mirror control system based on wireless communication
SONG Chuanwang1, SUN Fanqing1, HAN Yue2, LI Enyu1, WU Zeju1, XIE Shuaihu1
(1. School of Communication & Electronic Engineering, Qingdao University of Technology, Qingdao 266033, China;
2. College of Automobile and Transportation, Qingdao University of Technology, Qingdao 266033, China)
Abstract: The reduction of rearview mirror′s blind area is an important measure to improve the traffic safety of driver. Therefore, an automobile rearview mirror control system was designed by means of wireless communication technology. The steering wheel angle sensor is used in the transmitting terminal to acquire the steering wheel angle data. The NRF24L01 module is used to transmit the data in real time. The NRF24L01 module is adopted in the receiving terminal to perform the wireless receiving for the data. The STM32 is employed to process the wheel angle data to control the motor of the rearview mirror′s control terminal, and adjust the rearview mirror to the best position. The test analysis results show that the method based on wireless communication technology can realize the adaptive adjustment of the automobile rearview mirror, and reduce the blind area of the rearview mirror in the driving process of driver.
Keywords: rearview mirror control system; wireless communication technology; steering wheel angle sensor; data acquisition; data processing; STM32
0 引 言
近年來,因为后视镜视野出现盲区所引起的交通事故屡见不鲜,中国所占的比例约为30%、美国占的比例约为20%。驾驶员在行车过程中转弯或者变换车道时由于后视镜视野范围有限,会出现一定的盲区,因此常常会发生交通事故。为减小事故的发生率,急需研究一种新的技术应用在汽车电子行业,提高行车的安全性[1?2]。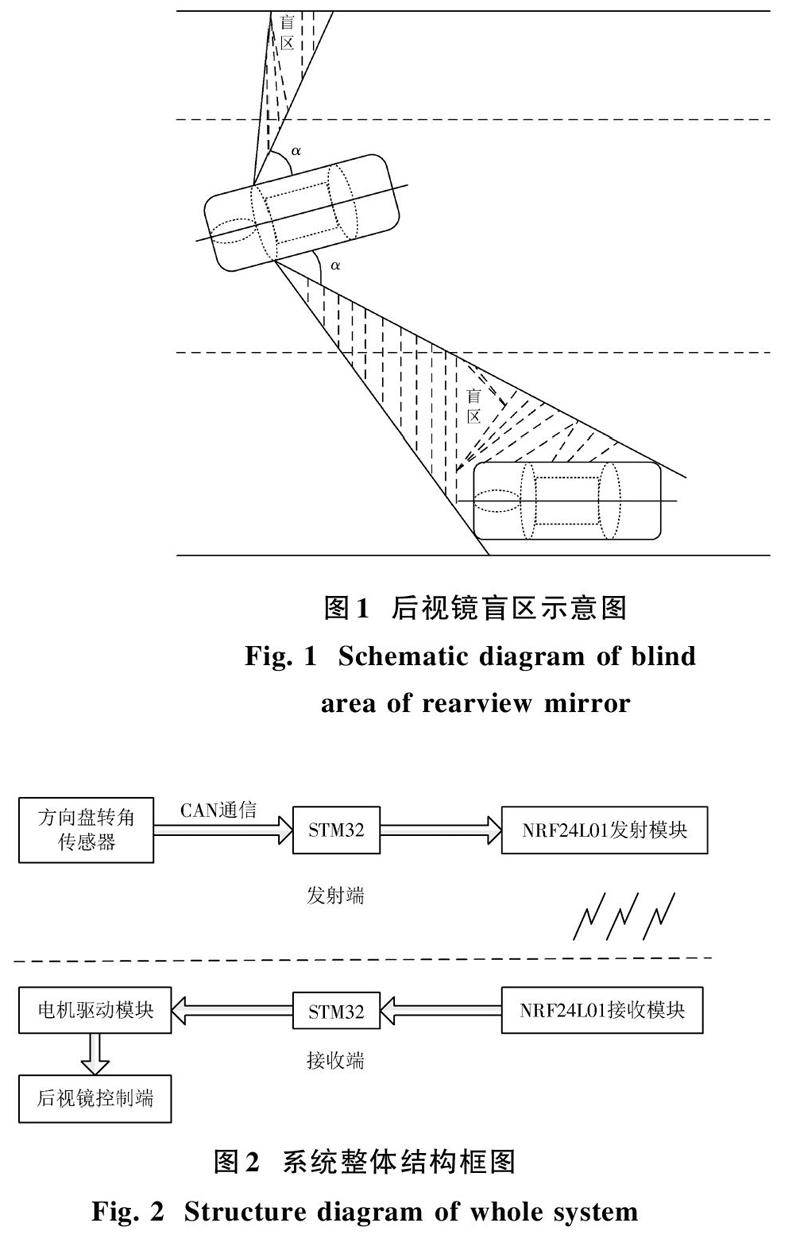
传统的汽车后视镜采用手动来操作,驾驶员可以根据个人需要手动调整后视镜来获得自己所需要的后视镜视野,对于行驶过程中的车辆来说极为不便。另外一种是驾驶员可在驾驶室内通过后视镜调节开关来调节后视镜,但需要驾驶员根据行车状态进行不断操作[3?4]。近年来,随着汽车电子技术的不断发展,人们对于汽车舒适感的需求也逐步增加[5]。文献[6]用有线通信技术的方式实现对电动后视镜的控制。文献[7]考虑到每个驾驶员的身高和驾驶习惯的不同,首先对座椅位置和后视镜位置进行调节,然后用有线通信技术方式来记忆驾驶员调整好的座椅和后视镜位置。从上述文献中可以看出,采用有线通信方式时,需要增加大量的线路或传感器处理电路,而采用传统有线方式不仅复杂、成本高,且不利于后期的功能扩展。
文献[8]尝试用无线通信方式实现行车记录数据的显示,为汽车驾驶员提供参考;文献[9]用位置传感器实现了倒车结束后后视镜位置的自动回复。
本文采用NRF24L01无线模块实现方向盘转角数据实时传输,进而对汽车后视镜进行控制,自适应地调整后视镜达到最佳位置,减小了驾驶员行车过程中后视镜视野盲区,提高了行车的安全性。
1 系统的总体设计方案
驾驶员在行车过程中变换车道时,如图1所示,左右后视镜都出现了视野盲区,另外一车道的车辆在盲区范围内,此时两辆车很有可能发生碰撞等交通事故。本文系统设计是通过检测方向盘的转动角度,自适应地调节后视镜的视野范围,即[α]的大小,目的是减小后视镜视野盲区,提高行车的安全性。
2 系统硬件设计
本系统由发射端和接收端组成,系统的整体结构框图如图2所示。采用STM32F103作为主控芯片,方向盘转角传感器和NRF24L01发射模块均与发射端的STM32相连。方向盘转角传感器对方向盘的转角数据进行实时采集,通过NRF24L01发射模块将数据实时发送。NRF24L01接收模块和电机驱动模块分别与接收端的STM32相连,STM32将接收到的数据进行数据处理后对电机驱动模块输入端进行高低电平的控制,實现对后视镜控制端电机的正反转控制,进而实现后视镜的角度调节。
2.1 发射端设计
本系统的发射端由方向盘转角传感器、CAN通信模块、STM32以及NRF24L01发射模块组成。
方向盘转角采集是用经纬恒润科技公司生产的型号为C68049XF25849366ANA761008A的传感器,其内部电路有CAN通信电路、电源稳压电路、光电传感器编码阵列和角度测量芯片等。该传感器的机械构造与汽车方向盘转向柱相匹配,可以固定在转向柱上[10]。驾驶员通过操作方向盘,使得传感器的主齿轮发生转动,其内部小齿轮也随之转动,转动圈数同方向盘转动圈数保持一致。另外,小齿轮上的小磁铁随着齿轮发生转动,周围的磁场发生变化,通过传感器内部角度测量芯片的检测输出一个模拟电压信号,此电压信号与小磁铁的转动角度成线性关系。经过该传感器内部的A/D模块将模拟电压信号转换成数字信号后,由内部DSP芯片进行数据处理,输出方向盘转角传感器内部齿轮的转角值,从而得到方向盘的转动角度。发射端的STM32以CAN通信方式接收方向盘转角传感器采集到的转角值。采用的无线传输模块即NRF24L01发射模块内置2.4 GHz天线,最高工作速率达到2 Mb/s,具有抗干扰能力强、功耗低等优点。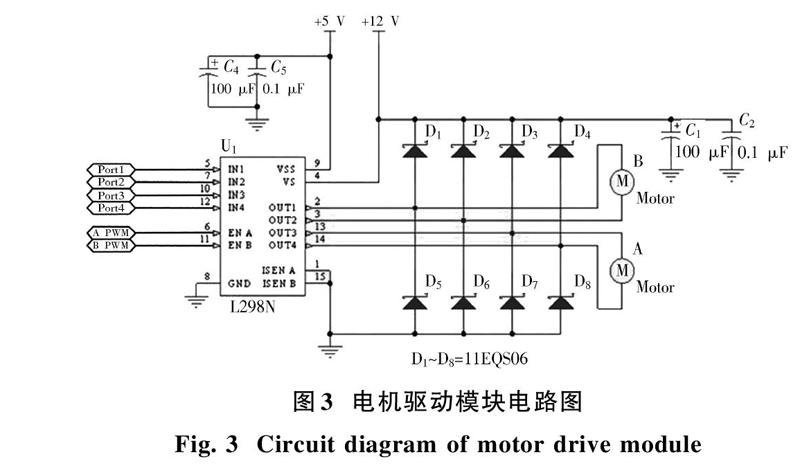
2.2 接收端设计
接收端采用NRF24L01接收模块接收数据,以SPI通信的方式将数据传递给STM32。接收端的STM32负责分析和处理数据。因为电机的负载较大,而单片机的输出电压和电流都比较小,不足以直接驱动电机,故采用电机驱动模块对后视镜控制端的电机进行控制。本设计采用L298N逻辑电路驱动后视镜端电机的转动[11],电机驱动模块的电路图如图3所示。
每个后视镜控制端装有2个小电机控制后视镜的角度,通过改变输入IN1和IN2的高低电平控制电机B的正转、反转和停止,改变输入IN3和IN4的高低电平控制电机A的正转、反转和停止,A、B电机协调控制后视镜角度的调整。
3 系统软件设计
3.1 发射端设计
发射端的软件流程如图4所示,主要包括各模块的初始化和方向盘转角数据的实时发送。初始化程序主要完成对NRF24L01发射模块的发送模式设置,数据的实时发送是将STM32接收到的转角数据以无线的方式发送给接收端。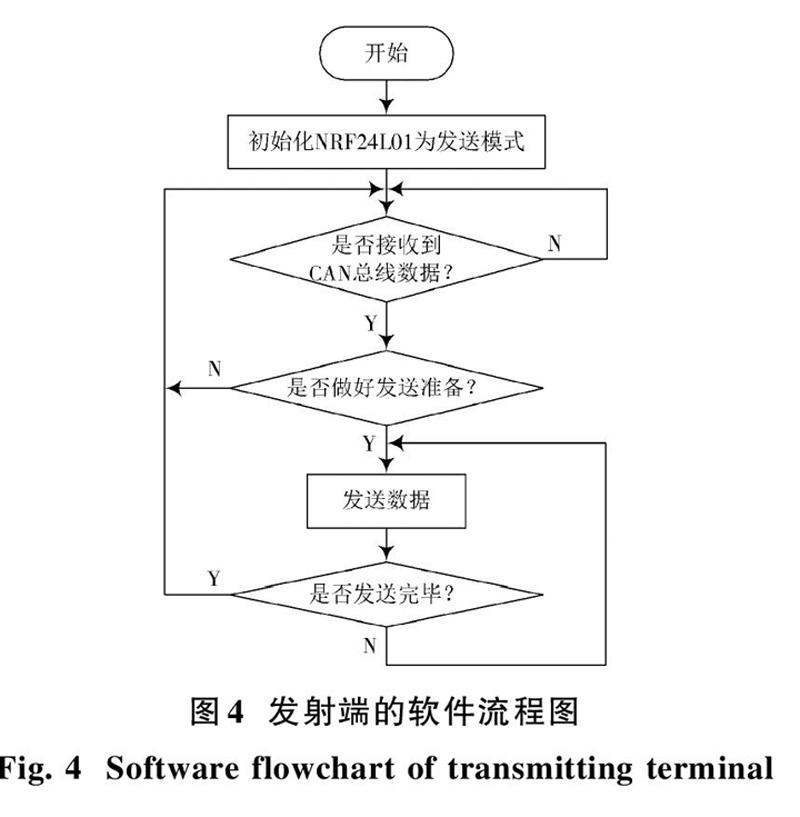
3.2 接收端设计
接收端的软件流程如图5所示,主要包括NRF24L01接收模块的初始化设置以及数据的分析和处理。首先判断NRF24L01接收模块是否接收到转角数据,对数据进行分析后判断方向盘是左转还是右转,如果采集到的转角值大于45°,且转角值发生变化,则实时控制电机转动,实现自适应的改变视野范围,否则继续接收方向盘转角数据进行分析。
首先是模块的初始化,包括TIMER,SPI,NRF24L01,串口等模块。将NRF24L01模块设置成接收模式,通过无线的方式接收发射端的转角数据。对接收端是否接收到数据进行判断,如果接收到转角数据则进一步判断方向盘转动的方向,分为左转和右转两种情况。
在检测到方向盘转动的情况下,如果转角值不超过45°,考虑到驾驶员的视野变化范围相对较小,保持电机状态即后视镜端状态不变;如果转角值超过45°,并且短时间内不断发生变化,表明驾驶员正在变换车道或转弯,对方向盘进行不断调整,控制电机转动;若是短时间内转角值在超过45°的情况下不发生变化,表明驾驶员正在等待变换车道或转弯,同样需要将后视镜视野调整至最佳,故保持当前电机状态不变,以减小视野盲区。电机的转动随着方向盘转角的变化而改变,实现后视镜的自适应调整。
4 系统测试与分析
本系统转角数据的接收测试通过上位机软件进行显示,结果如图6所示。方向盘分别左转和右转一定的角度,方向盘转角传感器将采集到的数据实时传输,无线接收端接收到的数据信息通过串口在PC机上显示。结果表明本系统实现了转角数据的无线发送和接收。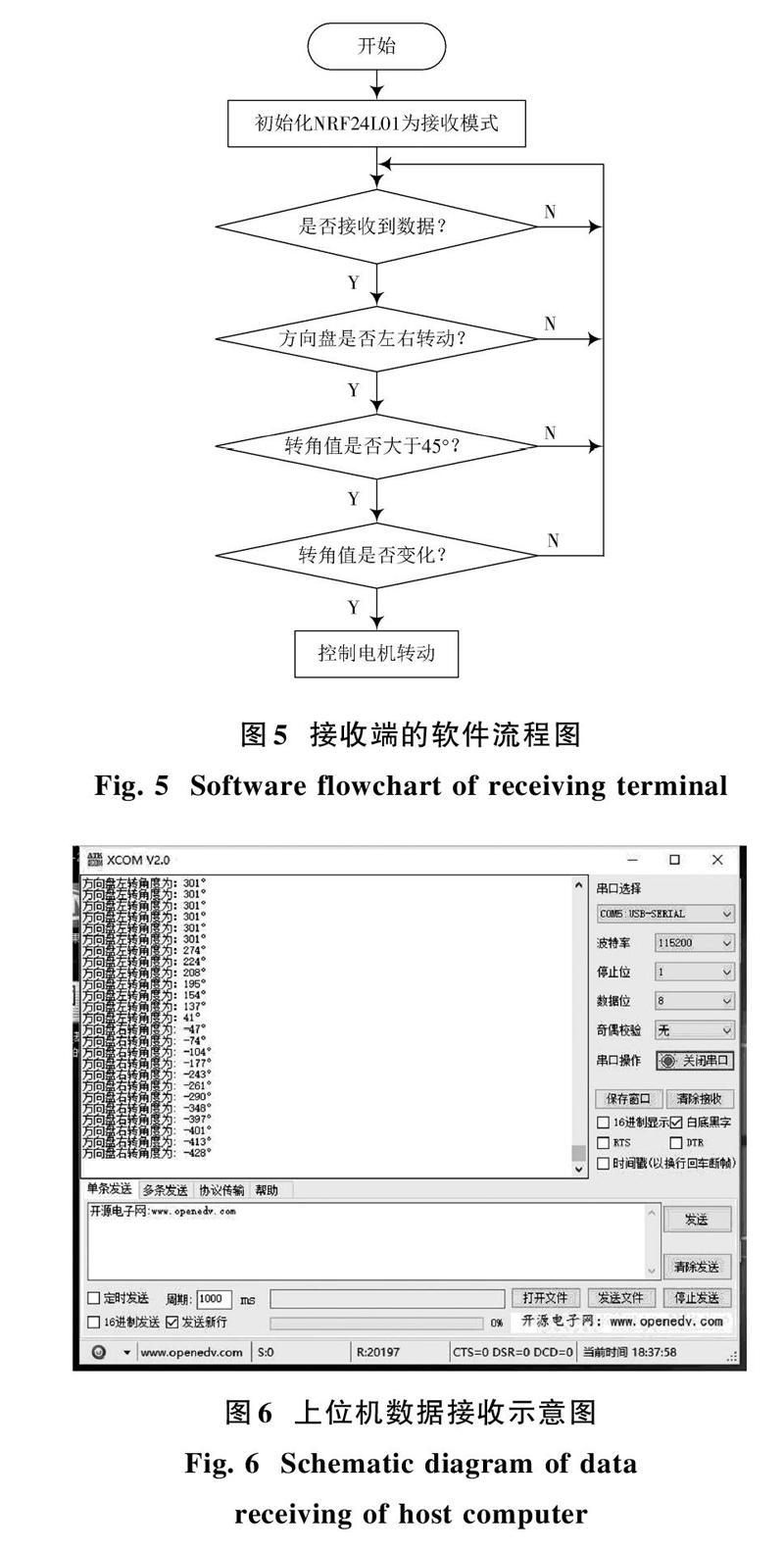
接收端收到方向盘转角数据后,对数据进行实时处理,利用电机驱动模块对后视镜控制端进行电机的调整。后视镜控制端实物图如图7所示,通过控制2个电机的转动,对后视镜进行上下、左右调节,实现后视镜视野的调整。
经实验测得:后视镜控制端中的电机在正常工作区域内转动时间是6 s。后视镜控制端的参数如表1所示,控制端工作角度大于或等于26°,本系统中取26°进行研究,设定车辆方向盘转角[β]的转动范围为:[-450°≤β≤450°,]通过角度与时间的对应关系可得,方向盘转角大于45°情况下,方向盘转角每转动10°,后视镜变化角度为0.64°,即对电机的控制时间约为74 ms。
方向盘转角值的绝对值与后视镜变化角度关系为: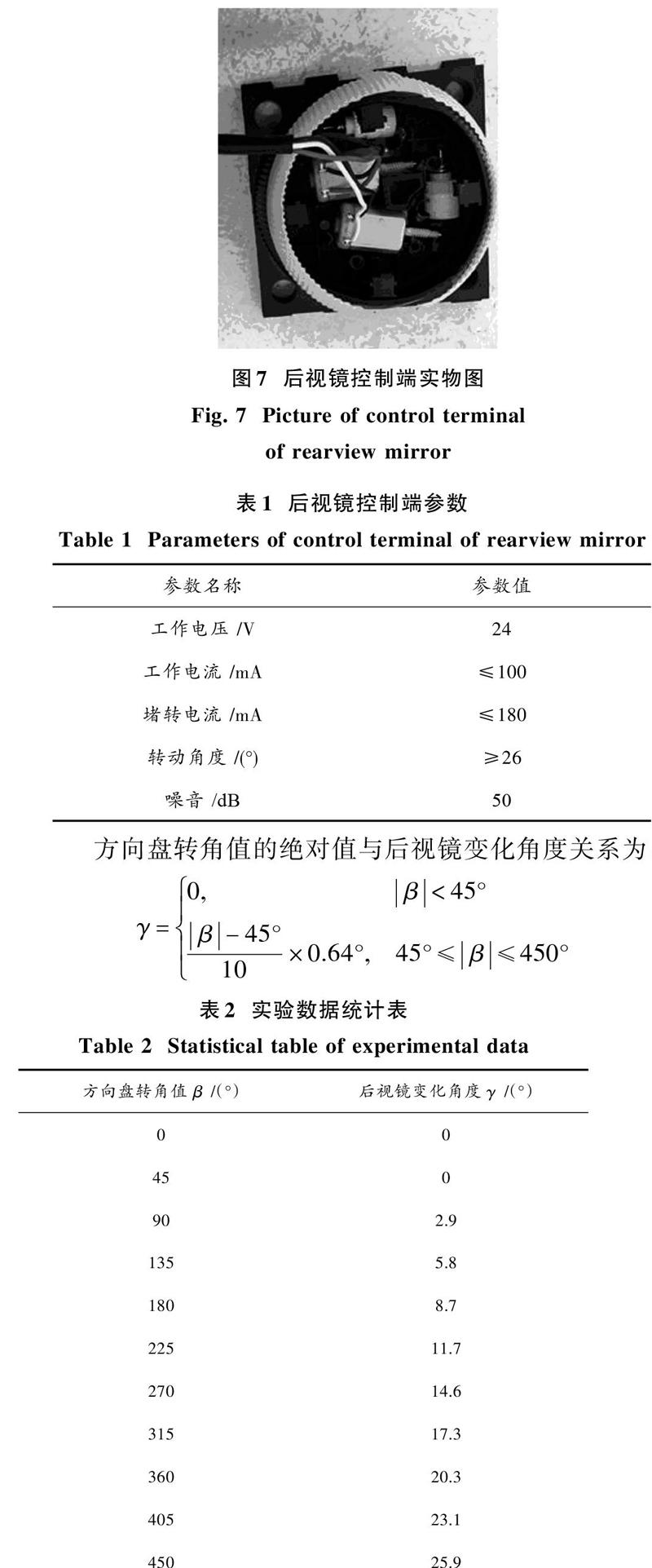
式中:[β]为方向盘转角值;[γ]为后视镜变化角度。
实验测得的方向盘转角值和对应的后视镜变化角度数据如表2所示,所得后视镜的变化角度的平均误差约为0.07°,实现了后视镜的自适应调整。
5 结 语
本文设计的基于无线通信的汽车后视镜控制系统实现了汽车方向盘转角数据的采集和实时无线传输,通过无线接收后对汽车后视镜的自适应调整来获得行车过程中转弯或者变换车道时的最佳视野。本系统减小了驾驶员在行车过程中变换车道或者转弯情况下后视镜的视野盲区,提高了行车的安全性。
参考文献
[1] 王昊.汽车视野安全的研究与进展[J].江苏理工大学学报(自然科学版),2001,23(2):46?50.
WANG Hao. Research and development of automobile visual field safety [J]. Journal of Jiangsu University of Science and Technology (natural science), 2001, 23(2): 46?50.
[2] 吴佳林,孔军.汽车后视镜盲区及预测方法[J].武汉理工大学学报(信息与管理工程版),2010,32(6):958?961.
WU Jialin, KONG Jun. Blind area and prediction method of auto rearview mirror [J]. Journal of Wuhan University of Technology (information & management engineering), 2010, 32(6): 958?961.
[3] 王琛玮,杨林,程雨恒,等.基于航向角的汽车后视镜转动规律研究[J].中國高新技术企业,2016(29):23?26.
WANG Chenwei, YANG Lin, CHENG Yuheng, et al. Study on rotation law of auto rearview mirror based on heading angle [J]. China high technology enterprises, 2016(29): 23?26.
[4] 赵治国,钟一鸣,赵楚豪,等.乘用车随动后视镜视野范围测量及转角分析[J].同济大学学报(自然科学版),2014,42(9):1408?1414.
ZHAO Zhiguo, ZHONG Yiming, ZHAO Chuhao, et al. Visual field measurement and rotation?angle analysis of follow?up rota?ting rear?view mirrors for passenger cars [J]. Journal of Tongji University (natural science), 2014, 42(9): 1408?1414.
[5] 童有好.中国汽车电子产业发展现状与趋势[J].中国经贸导刊,2007(11):27?29.
TONG Youhao. The current situation and trend of the development of China′s auto electronics industry [J]. China economic trade herald, 2007(11): 27?29.
[6] 黄科,陈贤,李海涛.一种汽车后视镜自动翻转控制系统的改进设计[J].科技创新导报,2010(16):33?35.
HUANG Ke, CHEN Xian, LI Haitao. An improved design of auto rearview mirror flipping control system for automobile [J]. Science and technology innovation herald, 2010(16): 33?35.
[7] 郑芳芳,李娟,刘成厚,等.一种基于CAN总线的汽车后视镜控制系统[J].农业装备与车辆工程,2014,52(2):44?47.
ZHENG Fangfang, LI Juan, LIU Chenghou, et al. Automobile′s rearview mirror control system based on CAN bus [J]. Agricultural equipment & vehicle engineering, 2014, 52(2): 44?47.
[8] 廖海鸿,吴明,赵惠,等.汽车后视镜和行车记录系统:CN202186333U[P].2012?04?11.
LIAO Haihong, WU Ming, ZHAO Hui, et al. Auto rearview mirror and vehicle record system: CN202186333U [P]. 2012?04?11.
[9] 张泽修.一种汽车后视镜控制装置:CN203753009U[P].2014?08?06.
ZHANG Zexiu. A car rearview mirror control device: CN203753009U [P]. 2014?08?06.
[10] 陈富安,李江江.迈锐宝等汽车用方向盘转角传感器工作原理研究[J].汽车实用技术,2015(4):4?6.
CHEN Fuan, LI Jiangjiang. Study on the working principle of the Malibu car and so on with a steering wheel angle sensor [J]. Automobile applied technology, 2015(4): 4?6.
[11] 何雍奥,张卫波.新款汽车后视镜自动调节装置的研发[J].海峡科学,2010(12):41?43.
HE Yongao, ZHANG Weibo. Research and development of a new auto rearview mirror adjusting device [J]. Straits science, 2010(12): 41?43.
