SCARA机器人的运动控制分析与计算
2018-04-04刘慕双杨荣章赵瑶瑶
刘慕双,杨荣章,赵瑶瑶
(承德石油高等专科学校 机械工程系,河北 承德 067000)
近年来,世界工业生产进入到了智能制造时代。德国提出了工业4.0计划, 我国为了赶上世界科技发展的步伐,制定了符合我国国情的《中国制造2025》行动纲领,计划到2025年我国制造业迈入制造业强国的行列。智能制造要求在工业生产中广泛使用机器人。目前我们国家在工业生产中使用机器人的比例与世界发达国家相比还比较低,主要是因为机器人控制原理复杂,造价成本较高。能否找到几种应用范围较广,控制原理易于实现,造价成本低廉的机器人方案,是解决机器人在我国工业生产中使用比例低的关键所在。工业生产中经常要在生产线上下搬运工件,采用3~4个自由度结构简单控制方便的SCARA机器人是解决这方面问题的较好选择。
1 SCARA机器人的结构原理及功能分析
SCARA(Selective Compliance Assembly Robot Arm,中文译名是选择顺应性装配机器手臂)是一种圆柱坐标型的结构简单、可以广泛应用在工业生产现场的机器人。如图1[1]所示,SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于水平面的运动。
如图2所示,手腕参考点的位置坐标(x,y,z)是由两旋转关节的角位移φ1和φ2及移动关节的位移z决定的[2],根据几何关系可以建立手腕参考点O3的坐标方程:
根据图2表达的SCARA机器人投影图形,可得抓取短点O3的坐标式[3]:

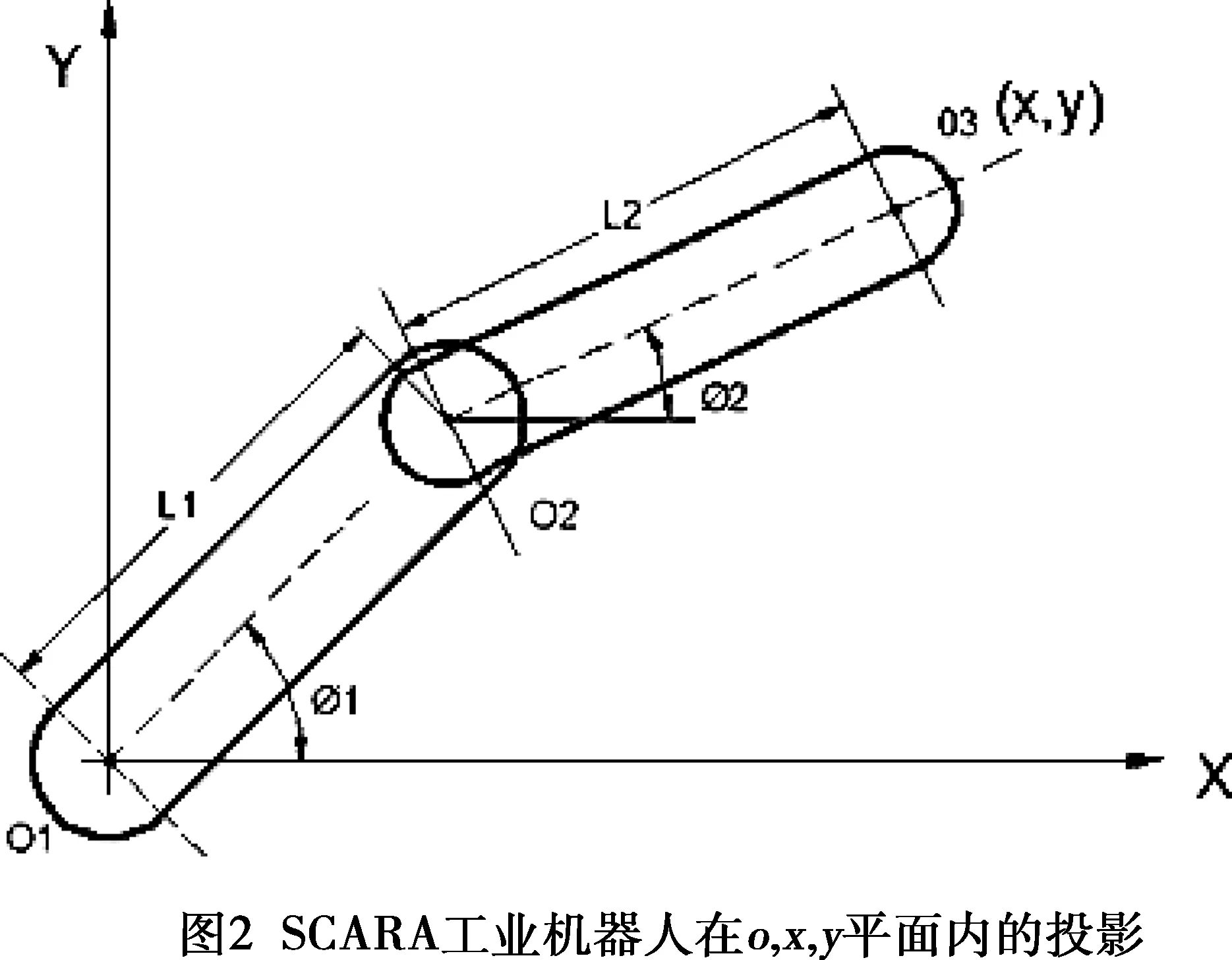
式中:L1、L2分别为两个摆臂的长度;φ1、φ2分别为两个摆臂对静止坐标系的转角;φ3为纵向移动丝杠对静止坐标系的转角;t为纵向移动丝杠的导程。

(6)

(7)
(8)
由(6)、(7)、(8)式得:
(9)
采用与上面相同处理方法可得:
(10)
考虑到减速器的减速比及伺服电机的脉冲转角等因素,发给伺服电机的脉冲数公式可表达为:
n1=φ1*i1/Δ1
(11)
n2=(φ2-φ1)*i2/Δ2
(12)
n3=φ3*i3/Δ3
(13)
分别将(9)、(10)、(3)式代入(11)、(12)、(13)式得:
式中:i1、i2、i3分别为三个伺服电机的减速比;△1、△2、△3分别为三个伺服电机的单位脉冲转角;n1、n2、n3分别为控制计算机发出的脉冲数。注意:n1、n2为正时,伺服电机逆时针转动,n1、n2为负时,伺服电机顺时针转动。
这类机器人的结构轻便、响应快,SCARA机器人运动速度可达10 m/s,比一般关节式机器人快数倍。它最适用于平面定位,垂直方向进行装配的作业。该机器人可具有四个轴和四个运动自由度(包括沿X、Y、Z方向的平移和绕Z轴的旋转自由度)。
SCARA系统在x、y方向上具有很强的灵活性,可以很方便地将集成电路芯片和其他器件针插入到PCB板中,故SCARA系统首先大量用于装配印刷电路板和电子零部件。SCARA机器人系统在Z轴方向具有良好的刚度,特别适合于工件在机床上加工时的定位安装及机器的零部件装配成整机方面的工作。所以在工业自动化生产中具有十分广泛的用途。
2 结论

1)SCARA机器人可以搬运工件,实现工件从三维空间内的一个点运送到另外一个点的操作,同时还可以实现工件在一个方向上的转动。
2)SCARA机器人的工作范围在水平面内的投影是一个扇形区域,区域的大小取决于两个臂的长度参数,在铅锤方向的工作范围取决直线导轨的运动范围,如图3[4]所示。
3)SCARA机器人能够广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业[4]等领域。它的主要作用是搬取零件和装配零件的工作。SCARA机器人的负重净载重量在0.1 kg至200 kg之间。
参考文献:
[1]左国栋,赵志勇,王冬青.SCARA机器人运动学分析及MATLAB建模仿真[D]. 青岛:青岛大学,2016.
[2]熊青春.四自由度教学机器人的研制[D]. 合肥:合肥工业大学,2005.
[3]刘江南.四自由度机械手轨迹规划算法与应用研究[D]. 哈尔滨:哈尔滨工业大学工程,2015.
[4]卢军,郑国穗,马金锋,等.SCARA机器人结构优化设计与运动分析[J].陕西科技大学学报,2014(1): 137-141.
