边坡清筛机侧犁防碰撞技术研究与应用
2018-04-04王瑞军高春雷周佳亮
王瑞军,高春雷,周佳亮
(1.济南铁路局 工务机械段,山东 济南 250022;2.中国铁道科学研究院 铁道建筑研究所,北京 100081)
铁道线路在运营过程中,会发生变形、磨耗、破损、腐蚀、脏污及老化,因此要对其进行养护、维修,以使其处于正常可靠的工作状态,保证行车安全。对碎石道床而言,当其不洁度超过30%时,应该进行清筛。由于道床清筛在线路大、中修任务中是一项工作量大、劳动强度高的作业项目,目前我国越来越多地采用大型养路机械来完成。其中,边坡清筛机是用来完成对边坡道砟的挖掘、清筛、回填、整形和抛土的大型养路机械,可大大改善道床的排水性能,延长线路的大修周期。侧犁是位于边坡清筛机两侧的工作机构,承担着对筛分好的道砟进行坡度整形的任务。由于侧犁必须频繁地超出限界进行整形工作,容易碰撞沿线两侧分布的接触网支柱等地面设施,造成安全或晚点等事故[1-2]。
针对边坡清筛机侧犁碰撞接触网支柱等设施的安全隐患,各路局采用了相关管理办法提高司机的安全驾驶意识。在噪声、振动和灰尘都很大的恶劣工作环境中,司机长时间集中精力保障施工安全是一件很困难的事情。为了降低司机劳动强度,解决边坡清筛机侧犁碰撞接触网支柱等设施的安全隐患,设计了一套侧犁防碰撞装置,介绍了装置的现场装车应用的方法,为边坡清筛机侧犁安全施工提供设备保障。侧犁防碰撞装置的技术方案将重点解决接触网支柱等地面设施位置检测和侧犁超限外伸量检测的问题,测量结果不能受到现场尘土等周围环境因素影响。
1 总体方案

1-边坡清筛机; 2-扬声器; 3-摄像机; 4-无线测距固定端; 5-计算机; 6-侧犁外伸量检测装置; 7-无线测距移动端; 8-侧犁 图1 侧犁防碰撞装置示意
边坡清筛机侧犁防碰撞装置见图1所示,该系统的无线测距装置由无线测距固定端4和无线测距移动端7组成。无线测距移动端用于标识障碍物的位置,它放置于接触网支柱或斜拉线旁边。无线测距固定端4安装在边坡清筛机车尾,它检测车前方最近的无线测距移动端7的位置,便可获取经过标识的障碍物的距离值D。侧犁外伸量检测装置6安装在侧犁旁的车身处。摄像机3安装在车尾,它实时检测车前现场图像。扬声器2安装在司机室,它向司机发出语音提示信息。司机室里的计算机5接收障碍物的距离值D、侧犁外伸量检测数据和监控图像,数据经计算和处理后,可控制声光报警器工作、语音提示和控制清筛机自动停车。
1.1 接触网支柱位置检测
测量接触网支柱位置的传感器按照被测物对检测信号的影响可分为主动探测类和标识类。主动探测类传感器是对某个信号区域进行主动探测,利用特定区域的物体对声光信号的反射,计算信号的往返时间和传播速度,达到测量的目的。例如激光、超声波、红外探测器、雷达等设备。标识类传感器一般至少由2个设备构成,一个设备放置于指定的被测物附近,标识被测物位置,另一个设备则是接收标识设备的信号。2个设备可以实现测距的功能,3个以上的设备能实现设备之间的空间定位。例如GPS、电子标签等设备。
主动探测类设备探测到的物体可能是灰尘、路过的工作人员、甚至可能是落叶等,这些物体对污土带不构成障碍,而此类设备无法自动区分探测到的是何种物体,因此误报率会很高[3-5]。
对于GPS和电子标签这些标识类设备而言,测量结果只能是唯一的被标识过的物体,这就大大增加了现场施工作业的灵活性,它们可用于标识斜拉线、接触网支柱等对侧犁构成障碍的一切地面设施。人为标识这些设施准确可靠,避撞装置将很少有误报。由于GPS设备定位区域大、价格高,局部定位误差受地形等环境的影响,所以选取基于电子标签标识障碍物位置的无线测距技术来获取障碍物的位置信息。
1.2 侧犁外伸量检测
侧犁外伸量检测装置见图2所示,该装置的核心单元由拉绳传感器和角度传感器组成。拉绳传感器下方有一个半径为r的导轮,轮的轴心与角度传感器的轴心重合。角度传感器前方有一个转动半径为R的摆杆,拉绳传感器的钢丝绳穿过摆杆的横梁后与侧犁外侧边缘固定。
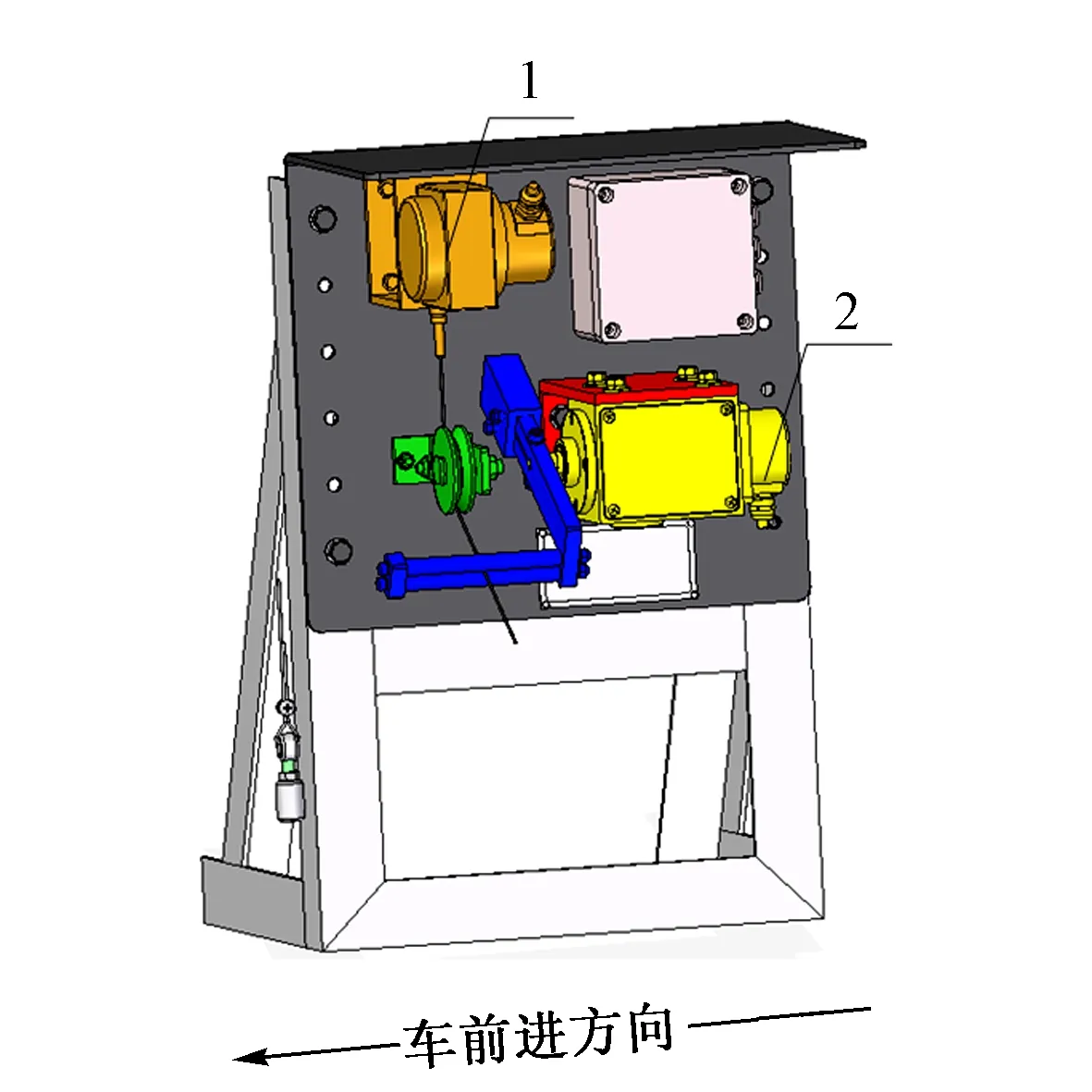
1-拉绳传感器; 2-角度传感器图2 侧犁外伸量检测装置

图3 侧犁外伸量检测数学模型
根据侧犁外伸量检测装置的机械结构,可得到侧犁外伸量检测的数学模型,见图3所示。设导轮轴心距线路中心为X0,钢丝绳垂直向下时的摆角为θ0,钢丝绳位于导轮水平轴的位置时的长度为L0,则侧犁外伸量X的计算公式为
式中:L为拉绳传感器的输出值;θ为角度传感器的输出值,其他参数为跟安装几何结构有关的已知量。
2 软件设计
2.1 软件结构
系统软件结构见图4所示,按功能划分为4个模块。显示HMI模块是人机交互界面,它告知司机障碍物的位置、侧犁超出限界的外伸量和现场作业视频图像。参数设置模块可对预警等级区间进行划分,用3个纵向设定参数Y1,Y2,Y3进行设置;还可对侧犁安全外伸量区间进行划分,用一个横向设定参数X1进行设置。状态监测模块用于查看系统工作过程中底层硬件的数字开关量输入输出、脉冲量和传感器的状态是否处于正常工作状态。防撞预警模块通过计算侧犁外伸量,以及接触网支柱等设施迎着作业方向的一侧和车辆端面之间的距离,与预设距离(Y1,Y2,Y3)比较,满足设定条件时,进行断续报警、持续报警或自动停车,实现辅助避障。

图4 系统软件结构
2.2 程序逻辑
侧犁防碰撞装置的程序逻辑见图5所示。程序采集无线测距、侧犁外伸量和图像数据,通过计算分析实现不报警、断续报警、持续报警和自动停车4个避障预警等级。4个避障预警等级程序逻辑划分是:当测距值D≥Y1时,不报警;当测距值D 图5 防撞预警程序逻辑 边坡清筛机拥有一套振动装置,可将泥土等杂质从筛网孔内分离出来。为减少车体振动对侧犁外伸量检测装置的影响,选用中值滤波算法对角度传感器和拉绳传感器的数据进行处理。具体步骤如下: 1)定义一个大小为20的数组a[20]用于存放传感器的数据。 2)采用冒泡排序算法对数组a[20]进行由小到大排序后,取数组中间2个数据a[9]和a[10]的均值。 3)采集传感器数据后更新数组a[20]。 通过对侧犁防碰撞装置的装车应用,总结了一套既能满足实际侧犁的防撞需求,又能适应边坡清筛机司机的使用习惯的操作流程: 1)启动电源 在边坡清筛机到达施工地点后,闭合防碰撞装置的保险和各级电源开关,系统在30 s后将自动启动并运行程序。 2)标识障碍物位置 车下防护工位操作人员将无线测距移动端放置于距线路中心3 m且与接触网支柱或斜拉线等障碍物位置对齐处。在数据跳动较大时,为保证测距精度,可将移动端托举到胸前高度或以上,使无线信号能无遮挡的在空中传输。 3)避障 根据预警危险等级进行避障:断续报警时,说明接触网支柱等设施距清筛机车尾距离已小于纵向设定参数Y1,此时应谨慎操作。持续报警时,应立即操作侧犁避让障碍。车下防护工位操作人员必须等到侧犁成功避开障碍物后,将无线测距移动端放置于下一个需标识的障碍物位置。 4)退出系统 施工完成后,将线路下的无线测距移动端放置于车上,在人机交互界面上退出系统软件后,断开防碰撞装置电源和保险。 2017年6月29日将侧犁防碰撞装置安装在济南局编号为09508#边坡清筛机上,并对装置的侧犁外伸量测量精度和侧犁防撞预警功能进行了试验。 侧犁外伸量精度测量试验过程:如图6所示,将侧犁分次外伸到距线路中心2.5~3.5 m范围内的3个采样点位置,用卷尺测量采样点处侧犁外边沿距线路中心的距离作为采样值,读取系统测得的外伸量并计算均值作为实测均值,将实测均值减去采样值作为侧犁外伸量测量精度。 图6 侧犁外伸量测量精度试验 试验结果见表1,侧犁外伸量测量精度可控制在0.1~0.3 m内。由于接触网支柱等设施距离线路中心3 m位置附近,检测侧犁距线路中心3 m附近的外伸量测量精度具有重要意义,表1中所测精度能保障侧犁通过障碍时具有0.1~0.3 m的安全距离。 侧犁防撞预警功能试验过程:如图7所示,将无线测距移动端放置于接触网支柱或斜拉线位置,设置Y1=20 m,Y2=18 m,Y3=14 m,X1=2.5 m,边坡清筛机驶向接触网支柱时,观察4个避障预警等级。 侧犁防撞预警功能试验结果:当测距值D≥Y1时,不报警;当测距值D 表1 侧犁外伸量测量精度试验结果 m 图7 侧犁防撞预警功能试验 本文设计的侧犁防碰撞装置选用了不受尘土等环境因素影响的接触网支柱等设施的位置检测技术,设计了基于拉绳传感器和角度传感器的侧犁外伸量检测装置,选用了中值滤波算法处理传感器数据的抖动问题,设计了4个避障预警等级,实现了侧犁防撞预警功能。该装置可在噪声、振动和灰尘都很大的恶劣工作环境中使用,降低了司机劳动强度,解决了边坡清筛机侧犁碰撞接触网支柱等设施的安全隐患。 [1]寇长青.全断面枕底清筛机[M].北京:中国铁道出版社,1998. [2]刘伟,王妍萍,曲冬辉.边坡清筛机控制系统的研究[J].北京服装学院学报,2016,36(3):79-86. [3]颜琼,李懿.清筛机污土输送装置防碰撞系统研究[J].中国铁路,2015(12):46-50. [4]高春雷.清筛机污土输送装置避障系统的设计[J].铁道建筑,2007,47(8):97-99. [5]薛安琳,周佳亮.BS-1200型边坡清筛机避撞辅助安全装置设计[J].铁道建筑,2014,54(5):145-147.
2.3 滤波算法
3 装车应用
4 现场试验



5 结语
