DBF和差波束测向设计与实现
2018-04-02刘红
刘红
(中国西南电子技术研究所四川成都610036)
DBF技术是一种以数字方法来实现波束合成的技术,是利用阵列天线同时接收多路信号,通过加权因子对空间不同天线的接收信号做加权求和而成。由于加权因子相当于滤波器系数,而输入的信号为空间位置不同天线的接收信号,所以数字波束合成相当于一个空域滤波器。
应用于测向系统的DBF技术在拥有优越性能的同时也带来了相应的设计难度。为了获得要求较高的实时性,需要具有多天线阵元、多通道接收机、多通道数据采集处理、多路采集同步、大数据量高速传输、多路信息实时处理、结果上报等要求,其中多路采集同步对系统测向精度对信号同步采集要求较高。因此关于DBF测向的理论研究较多,具体工程实现较少,早期的DBF测向系统都是通过把多路无线信号采集并存储后,进行事后离线处理,不能对信号进行实时处理并获得信号的来波方向。
同时,采用DBF技术测量电磁波信号来波方向的手段有多种,常用的有和差幅度比较法和和差相位比较法。文中采用在接收天线阵中广泛采用的和差幅度比较法,对硬件平台采集、测量要求较低,易于实现。文中的测向处理系统基于先进的VPX平台,具有高速数据采集、传输和处理的能力,采用大容量FPGA、多核DSP以及嵌入式操作系统,采用模块化的设计思路,能对多个通道信号进行同步采集处理、波束覆盖范围广、具有实时波束合成、实时测量信号来波方向的功能[1-4]。
1 DBF和差波束测向原理
1.1 DBF原理
图1为N元均匀线阵波束合成原理图。设x(it)(i=1,2,…,N)为t时刻第i号天线接收到的信号,w(it)(i=1,2,…,N)为对应天线幅度相位加权系数,则t时刻波束合成后阵列输出信号为:

其中,W=[w1,w2,…,wN]为加权系数向量,X(t)=[x(1t),x(2t),…,x(Nt)]T为阵列接收信号矩阵。
通过改变权系数W的值可控制信号的移相量和信号幅度,进而控制波束指向。信号经过DBF后,可以显著提高信噪比,对干扰信号进行抑制[5-7]。
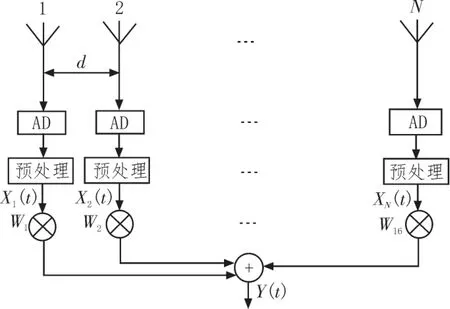
图1 N元均匀线阵波束合成原理图
1.2 和差波束合成
在数字波束合成时,通过幅度加权得到和差波束。
如图2所示,将N个天线接收信号经过幅相加权后,可得到合成后的和波束输出YΣ:

把和波束分为左右相等的两部分,由左边一半和波束输出信号与右边一半和波束输出信号相减,即可得到差波束输出YΔ:

其中,WL=[w1,w2,…,wN/2],WR=[wN/2+1,wN/2+2,…,wN],XL(t)=[x1(t),x2(t),…,xN/2(t)],XR(t)=[xN/2+1(t),xN/2+2(t),…,XN(t)]。
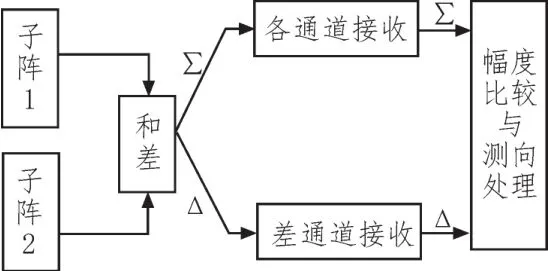
图2 阵列天线幅度和差波束合成
1.3 利用和差波束测向
本方案采用了具有16个阵元的线性天线阵,天线间距d为0.14 m的均匀线阵,合成8个约3 dB波束宽度重合波束,同时覆盖-45°到+45°的空域。采用的和、差幅度比较单脉冲法,利用天线和差波束之间的幅度差与偏离方位主轴的角度关系进行测向。这种幅度法测角所要求的设备量少,除对和差通道的增益均衡外,对两路之间的相位关系要求不高,较容易实现,其原理框图如图2所示。
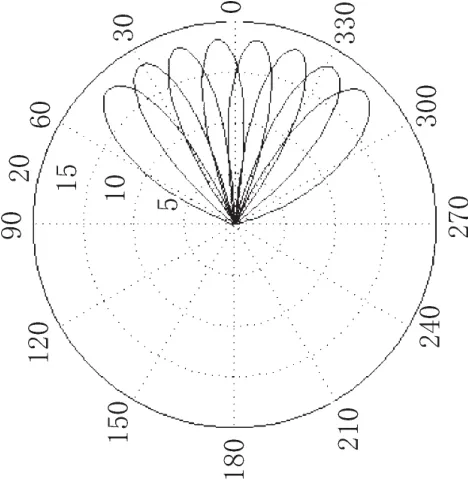
图3 DBF波束覆盖仿真示意图
同时合成的8个瞬时带宽10 MHz的波束覆盖-45°到+45°的空域,波束合成后增益16 dB左右,如图3所示。
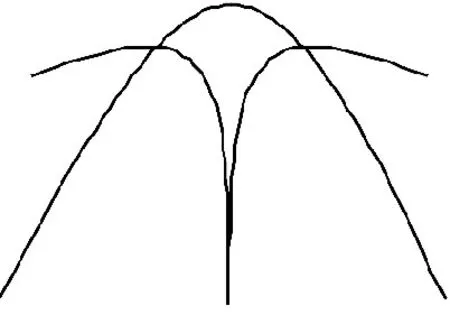
图4 和差波束方向图的细化图形
对于单个波束,通过对和差波束的幅度进行测量,计算出和波束与差波束对应频点信号幅度比K,查找偏离角表(和差方向图查找表)得到偏离角,确定信号在波束内的位置。如图4所示,由于天线的波束是关于中心对称,所以有两个位置具有相同的和差比值,它们位于中心点的两侧。但是,通过提取和差波束内对应信号的相位,计算和差信号的相位关系,可以确定目标在和波束主轴方向的左侧或右侧。偏离角加上波束的瞄准角,即可算出目标的方位角。
对于合成的多波束,需先对覆盖范围内的多个和波束对应频点的信号进行比幅,根据信号幅度的大小,确定信号来波方向在哪个波束中,然后再进行单波束测向[7-12]。
2 系统设计
2.1 关键技术及解决方法
1)多路信号采集及同步
根据前面的DBF测向原理,为了提高空域覆盖范围,保证测向精度,本系统对16路中频信号进行同步采集,合成8个波束。为了尽可能地降低系统的复杂性,采用了两个采集处理模块对16路信号进行采集,单个采集处理模块具有8路采集能力。
为了满足系统对相位一致性的要求,提高测量精度,所有采集电路采用统一时钟源设计,并且在模块间设计了同步信号,确保。
2)大数据量高速传输
为了满足系统对信号带宽的要求,采集处理模块采用250 MHz sps的采样率,数据分辨率为14 bit。如果把采样数据实时地传输,那么需要500 MByte/s的传输速率,8路AD数据转换为串行信号传输至少需要32 Gbps的传输速率。这样高的传输速率对模块间的传输速率、缓存能力和处理要求都较高。
为了降低传输速率对系统硬件的要求,降低设计难度,在各个采集处理模块上对信号进行了预处理和波束预合成运算,并把波束预合成结果通过SRIO高速数据传输网络传送到主控模块上。同时,系统中模块之间的数据传输采用4通道2.5 Gbps SRIO交换网络,模块间的数据传输速率可以达到10 Gbps的速率,这样就在降低了数据传输负荷的同时并保证了数据传输的实时性,以实现实时测向的目的。
2.2 DBF和差波束测向系统设计
DBF测向系统组成如图5所示,系统基本由3部分组成,第一部分由天线及天线开关网络组成;第二部分由接收机模块和标校时钟源模块组成;第三部分由采集处理模块、交换模块、控制及接口处理模块和显示控制计算机组成。
天线及天线开关完成对空间的电磁波信号进行接收、传输。接收机模块含独立时钟源、频综、信道和监控电路,是一个可独立工作的接收机,对射频信号进行下变频和滤波处理,系统通过CAN总线对其进行控制。各个接收模块间通过时钟级联可以相参工作,适应测向的要求。标校时钟源提供系统基准时钟,同时可以为测向提供标校信号。系统中所有模块均为标准VPX 6U尺寸插卡,采用高低频混装的连接器与背板进行连接。所有模块可以根据需要进行组合,以满足不同场合的应用。
如图5所示,处理系统作为整个测向系统中的一个重要部分,采用软件无线电设计思路,在通用硬件处理平台上,通过加载测向软件来实现系统功能。处理系统机箱中包含两个采样及预处理模块、一个交换模块、一个控制及接口处理模块;交换模块实现VPX机箱内各个模块之间的高速串行RapidIO交换;控制及接口模块完成系统各模块的协同控制,同时与上位机交互数据,上位机则完成参数下发、监控、结果显示等功能。
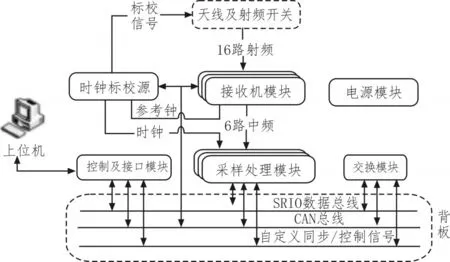
图5 DBF测向系统组成
2.3 测向工作流程设计
DBF测向工作流程主要由测向数据库准备、测向系统标校和测向3个过程组成。
测向数据库准备,是在系统上电后,上位机把测向需要的权系数理论库和测向库下载到主控模块中,以供测向时计算所用。
测向系统标校是指在系统进行测向之前需要对整个系统的接收信道、数据采集等在各个频点进行计算并对理论权系数校正,以消除系统误差。标校流程如图6所示,上位机下发标校启动命令,同时下发标校的频率范围等参数;主控模块收到标校命令后,控制采集处理模块进行同步采样,并根据采集处理模块的数据对权系数理论数据进行标校;主控模块在完成对所有频点标校后,向上位机上报标校结果。
DBF测向系统的测向工作流程如图7所示,由上位机软件控制测向系统工作。上位机通过以太网下发测向启动命令的同时,下发目标信号的频率、带宽等参数,主控模块接收到测向命令后,通过SRIO总线向各个采集处理模块发送该频点的权系数用于波束预合成,并通过LVDS接口对多个模块发送同步采集脉冲启动采集处理模块进行采集;采集处理模块在同步采集脉冲的控制下,进行采集并对数据进行处理和波束预合成,最后通过SRIO总线把波束预合成结果数据发送到主控模块;主控模块对收到的8路数据进行波束合成,并根据测向数据库和波束合成结果在测向库中进行查表比对,最后并把频谱、信号频点、信号方位等结果数据进行整理上传到上位机;上位机接收到8个波束的频谱数据和信号方位,通过文字和图形的形式在用户界面上显示[13-16]。
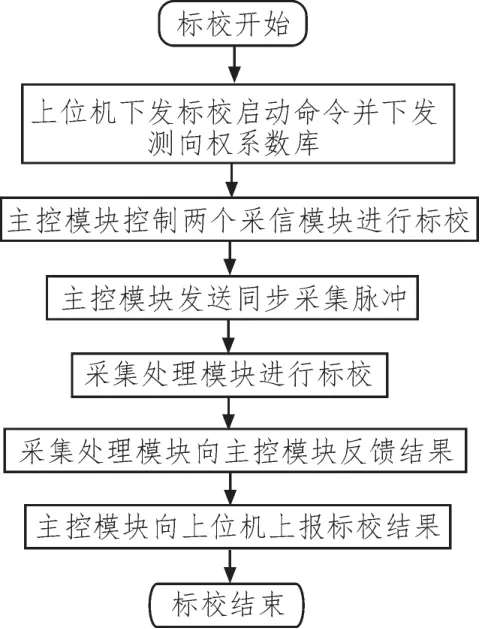
图6 DBF测向系统标校流程
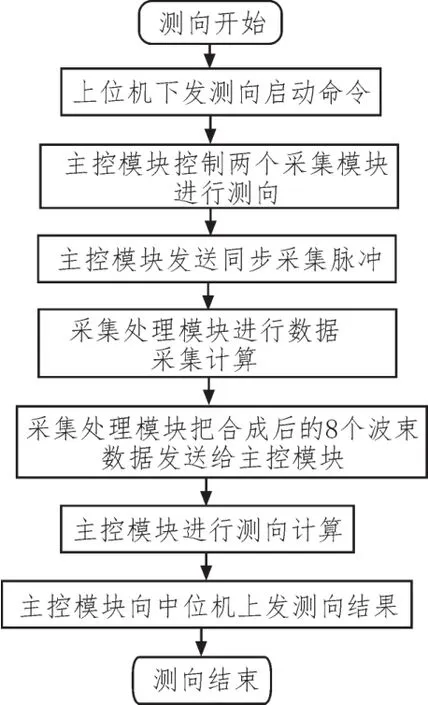
图7 DBF测向工作流程
为了验证本系统的测向功能技术指标,在实验室环境下,采用了一个1分16的功分器和一个16通道中频移相器模拟16阵元天线及接收机的输出信号。以移相器的第1路作为基准,控制第2至第16通道移相角度,对这16路中频信号进行同步采集并处理。
3 结束语
本文根据DBF和差波束测向的原理和特点,设计了一种基于VPX平台的测向处理系统。对系统组成、硬件架构、工作流程进行了详细设计。与传统的测向处理系统相比,本文提出的方案可行、实用,具有通用、小型化的特点。根据此方案研制出了实际的硬件设备对原理和流程进行了验证,对225 MHz~3 GHz的信号进行了测向试验,测向误差小于1.5°,实验表明系统运行可靠、接口稳定、性能指标达到了设计要求。
参考文献:
[1]杨小牛,楼才义,徐建良.软件无线电技术及应用[M].北京:北京理工大学出版社,2010.
[2]向宇.DBF中的数据转换系统设计[D].成都:电子科技大学,2014.
[3]董国英.侦察阵列接收机数字波束形成和测向方法研究及其工程实现[M].西安:西安电子科技大学,2010.
[4]胡广书.数字信号处理理论、算法与实现[M].北京:清华大学出版社,2003.
[5]马银玲,毛秀丽.基于DBF的比幅测向方法研究[J].舰船电子对抗,2014,33(2):91-93.
[6]张忠传,邰新军.相控阵中频数字和差波束形成技术 [J].数据采集与处理,2012,27(S1):9-13.
[7]韦北余,朱岱寅,吴迪,等.一种基于和差波束的机载SAR定位算法[J].电子与信息学报,2013,35(6):1464-1470.
[8]李钢.基于和差波束形成的阵列信号处理平台设计[D].西安:西安电子科技大学,2010.
[9]韩彦明,陈希信.自适应和差波束形成与单脉冲测角研究[J].现代雷达,2010,32(12):44-47.
[10]杨欣然,吴琼之,范秋香.多通道实时阵列信号处理系统的设计[J].电子设计工程,2015 23(12):176-179.
[11]方棉佳,吕涛.单脉冲和差波束测角的精度研究[J].雷达科学与技术,2013 11(6):645-649.
[12]许京伟,廖桂生,朱圣棋.基于幅相线性约束的自适应和差波束形成方法研究[J].电子学报,2013,41(9):1724-1729.
[13]杨雪亚,刘张林.子阵级和差波束形成及测角方法研究[J].中国电子科学研究院学报,2015,10(1):82-86.
[14]杨玲芳,孙国梁,李炬金.数字和差波束形成的实验研究 [J].空军预警学院学报,2016,30(5):334-337.
[15]杨欣然,吴琼之,范秋香.多通道实时阵列信号处理系统的设计 [J].电子设计工程,2015,23(12):176-179.
[16]邱冬冬,金华松,孙永江.自适应波束形成算法的研究[J].电子设计工程,2013,21(1):44-46.