叶片调节式水田侧深施肥装置设计与试验
2018-04-02王金峰高观保王金武闫东伟
王金峰 高观保 王金武 闫东伟
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
水田侧深施肥是采用施肥机械将化肥施入泥面以下5 cm、水稻苗侧3~5 cm的位置,可以提高水稻产量和肥效利用率,减轻环境污染,是目前水田最主要的施肥方式[1]。当今水稻机械化生产采用两大栽培体系,一是以欧美为代表的水稻直播机械化栽培体系,二是以日本为代表的水稻移栽机械化栽培体系[2-3]。欧美国家水稻的种植方式为直播,普遍采用撒肥机进行施肥作业,或喷药和施肥同步作业。日本水稻种植方式为移栽,普遍采用插秧和深施肥同步作业,机械插秧和深施肥已实现了系列化和标准化,如久保田SPU-65型侧深施肥装置、洋马2FC-6型侧深施肥装置、井关PZ60型插秧机配装侧深施肥装置和东洋PD60型侧深施肥装置。以上品牌的侧深施肥装置采用机械结构排肥和风机吹送方式施肥,施肥量调节范围为60~930 kg/hm2。久保田、井关和东洋公司生产的侧深施肥装置采用外槽轮式排肥器,也是目前侧深施肥的主要排肥形式。洋马公司生产的侧深施肥装置采用更换不同孔径的排肥盘和齿轮,并调节齿轮转速实现肥料的调节,但结构复杂,安装精度高,配件易磨损,且配件成本高。上述4种品牌的侧深施肥装置只能在同品牌的插秧机上配套使用,适应性差,无法对现有的插秧机进行改造[4-8]。中国对水田深施技术的研究始于20世纪60年代,先后研制了20多种不同方案的水田深施机械,目前,主要采用螺旋输送器作为施肥部件强制施肥,但由于结构复杂,施肥量调节能力差,故没能大面积推广和使用[2,9-12]。
针对上述问题,本文设计一种水田侧深施肥装置,通过改变叶片组合体构成的中心通孔大小,实现排肥和施肥量调节。通过在插秧机上增加连接部件,将侧深施肥装置安装在分插机构前方的浮板位置,或独立装配在插秧机分插机构的后方,与不同品牌和型号的插秧机配套使用,实现插秧时同步进行侧深施肥作业。
1 施肥农艺要求
水田侧深施肥装置可与插秧机配套,插秧同时进行侧深施肥作业,为了适应不同水稻品种、不同株距和不同作业时期施肥量需求,要求水田侧深施肥装置排肥量的调节范围为60~930 kg/hm2,作业速度为0.8~1.2 m/s[2,13]。
2 水田侧深施肥装置结构和工作原理
叶片调节式水田侧深施肥装置是一种用于水稻苗侧深施肥作业的装置,主要由肥箱、螺旋钢丝、施肥量调节机构、防堵排肥机构和施肥靴等组成,其中施肥量调节机构为主要工作部件,施肥装置结构如图1所示。
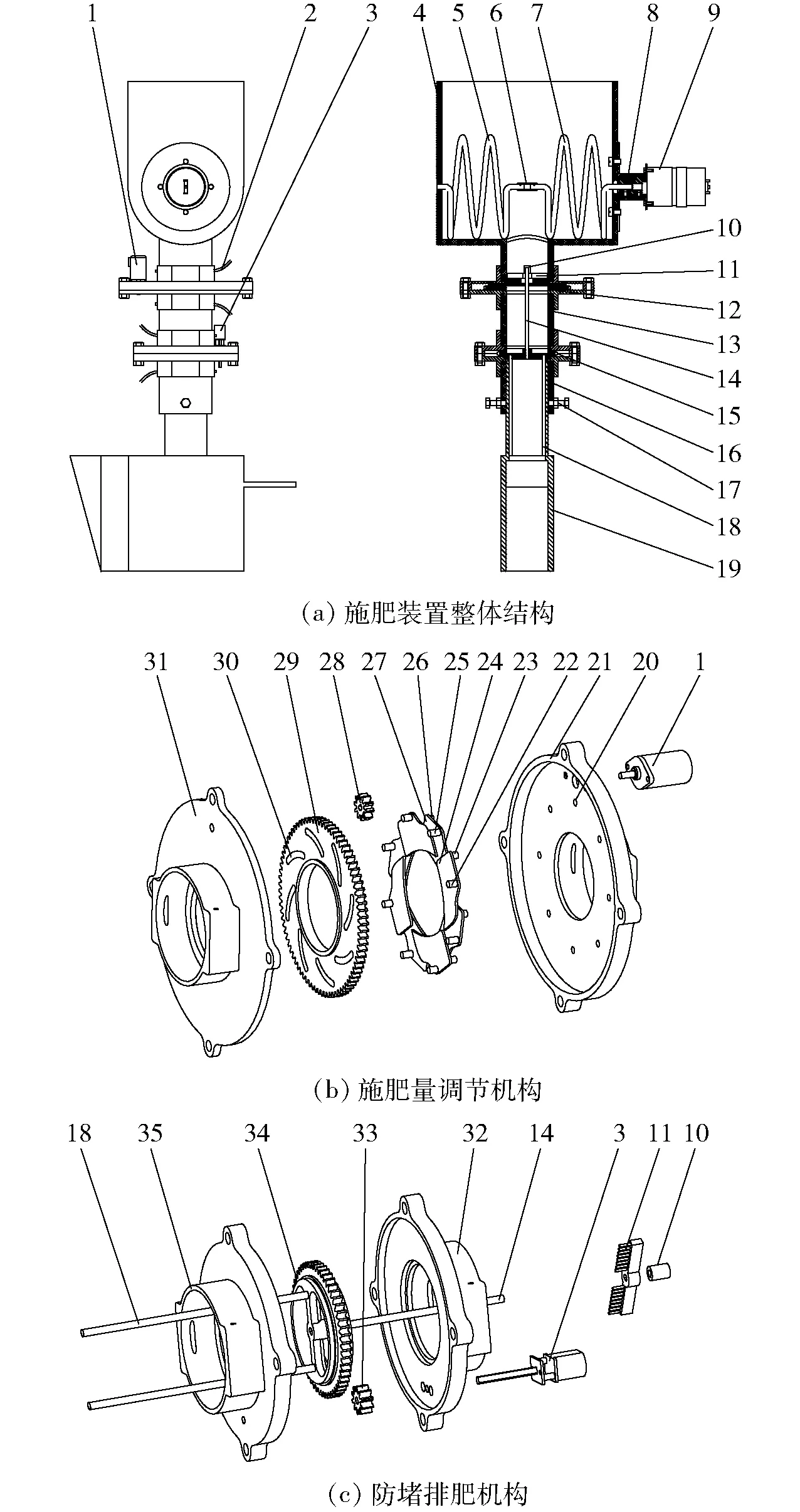
图1 侧深施肥装置结构图Fig.1 Structure diagrams of side deep fertilizing device1.步进电动机 2.插孔式锁紧钢丝 3.防堵装置直流电动机 4.肥箱 5、7.螺旋钢丝 6、8.联轴器 9.肥箱直流电动机 10.毛刷锁紧帽 11.毛刷 12.施肥量调节机构 13.上施肥管14.毛刷连接杆 15.防堵排肥机构 16.下施肥管 17.施肥靴锁紧螺栓 18.刮肥杆 19.施肥靴 20.销轴孔 21.施肥量调节机构上壳体 22.下叶片滑动限位柱 23.下叶片销轴 24.下叶片 25.上叶片滑动限位柱 26.上叶片销轴 27.上叶片 28.主动齿轮 29.齿轮转动环 30.导向滑槽 31.施肥量调节机构下壳体 32.防堵排肥机构上壳体 33.驱动齿轮 34.齿轮环 35.防堵排肥机构下壳体
施肥装置由上至下依次安装肥箱、施肥量调节机构、上施肥管、防堵排肥机构、下施肥管和施肥靴,采用插孔式锁紧钢丝或施肥靴锁紧螺栓连接。在肥箱内安装螺旋钢丝,通过联轴器固定连接。肥箱直流电动机通过联轴器与螺旋钢丝连接并驱动螺旋钢丝转动,如图1a所示。
施肥量调节机构结构如图1b所示。在施肥量调节机构上壳体与下壳体内部可转动装配相互啮合的主动齿轮和齿轮转动环,施肥量调节机构上壳体上端外部设置步进电动机,主动齿轮固定安装在步进电动机轴上,齿轮转动环上沿圆周方向均匀分布弧形的导向滑槽。在施肥量调节机构上壳体与下壳体内部,位于齿轮转动环上侧从上至下依次装配上叶片和下叶片,并沿圆周方向呈间隔交叉错位配置,在上叶片的上下端面上分别安装销轴和滑动限位柱,销轴可转动的插装在施肥量调节机构上壳体的销轴孔内,滑动限位柱沿圆周方向间隔插配在相邻的弧形导向滑槽内。
防堵排肥机构结构如图1c所示。在防堵排肥机构上壳体与下壳体内部可转动装配相互啮合的驱动齿轮和齿轮环,防堵排肥机构上壳体上端外部安装防堵装置直流电动机带动驱动齿轮转动。齿轮环上端与带有毛刷的毛刷杆连接,下端与刮肥杆连接。刮肥杆圆柱面与施肥靴输肥孔内壁接触。
作业时,肥箱直流电动机驱动螺旋钢丝转动,将化肥从肥箱内部两端向中央输送。防堵排肥直流电动机驱动齿轮环转动,并带动毛刷和刮肥杆同步转动,毛刷在转动时促进肥料颗粒下落,同时使化肥无法粘附在施肥量调节机构叶片表面和施肥靴内壁。当需要改变施肥量时,通过控制步进电动机进行正向或反向转动,驱动齿轮环转动,在上、下叶片销轴与施肥量调节机构上壳体销轴孔的配合控制下,滑动限位柱与齿轮转动环上的弧形导向滑槽滑动限位配合下,使上、下叶片分别绕销轴孔做向圆心内侧方向或向圆心外侧方向的摆动,改变其上、下叶片构成的中心通孔大小,实现和完成施肥量调节[14-18]。
3 施肥量调节机构设计
当前水田侧深施肥装置主要采用外槽轮式排肥器,但外槽轮式排肥器工作时存在脉动现象,施肥质量无法达到国家标准要求,因此需设计一种新型施肥量调节机构。应用“水田侧深施肥肥量调节装置计算机优化软件V1.0”得出施肥量调节机构主要参数:齿轮转动环分度圆半径为40 mm、齿轮转动环圆环宽度为20 mm、叶片数量为8、销轴孔轴心点与施肥量调节机构上壳体圆心的距离为35 mm、销轴孔轴心点与滑动限位柱轴心点的距离为15 mm、齿轮转动环的角速度为68 r/s、叶片绕销轴孔轴心点转动的角速度为35 r/s[19-21]。
步进电动机进行正向或反向转动,驱动齿轮转动环转动,使上、下叶片绕着销轴孔转动。为保证施肥量调节的顺畅,上、下叶片在安装时采用间隙配合,因此,在工作时每个叶片仅受到肥料颗粒的压力FN和叶片之间的摩擦力Ff,如图2所示。
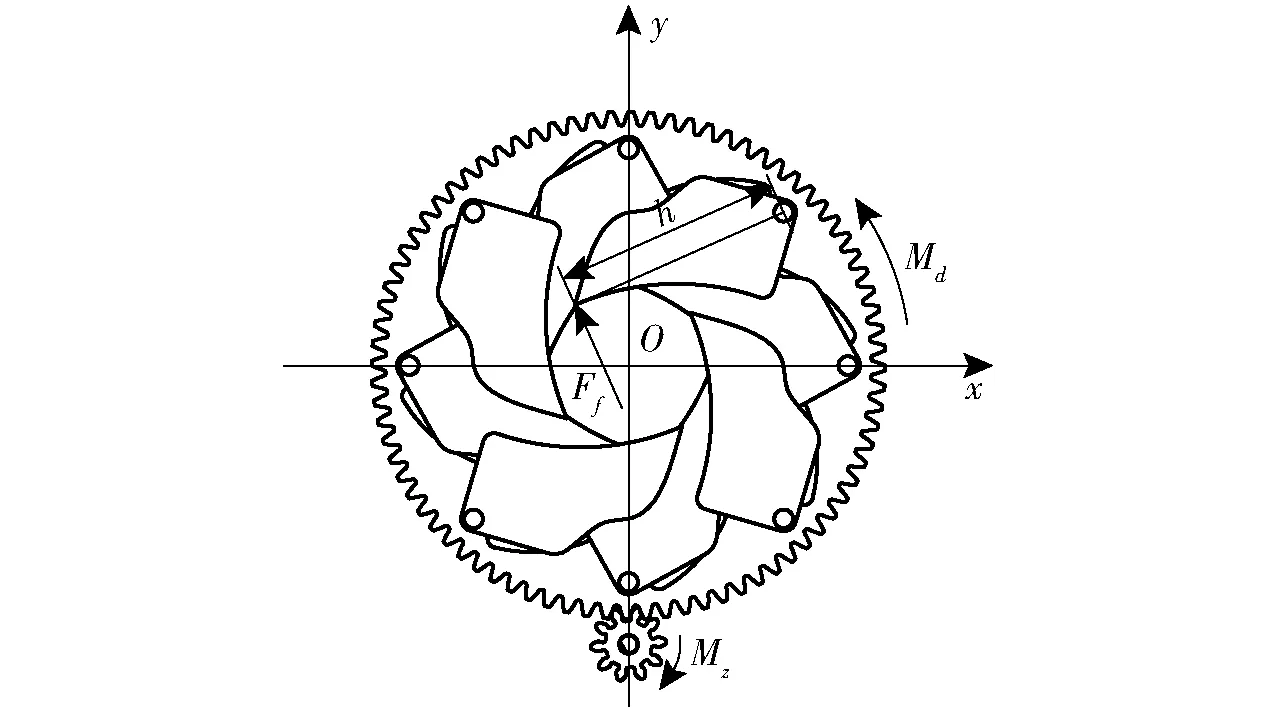
图2 叶片xOy平面受力图Fig.2 Force diagram of blade in xOy plane
肥料颗粒的压力和叶片之间的摩擦力之间满足
Ff=μFN
(1)
式中μ——摩擦因数
假设肥箱满载时肥料的重力全部作用在叶片上,每个叶片平均分担肥料压力,且压力的作用点均在叶片的顶点位置,当μ=1时,齿轮转动环的最大驱动力矩
Md=8Ffh=8FNh=Gh
(2)
式中h——叶片销轴轴心与叶片尖点的距离,mm
G——肥箱满载时肥料重力,N
主动齿轮和齿轮转动环相互啮合,在输出功率相同条件下,主动齿轮的驱动力矩
(3)
式中Zz——主动齿轮齿数
Zd——齿轮转动环齿数
肥箱满载时肥料的质量为15 kg,肥料的重力为147 N,叶片销轴轴心与叶片尖点的距离为37 mm,主动齿轮齿数Zz为10,齿轮转动环齿数Zd为80,代入式(2)、(3)可得,Mz为680 N·mm。为保证施肥量调节机构工作顺畅,步进电动机的输出扭矩大于Mz即可。
4 施肥过程仿真分析
排肥时,螺旋钢丝和毛刷受到肥料颗粒摩擦力的作用,肥料处于流动状态,传统的力学方法无法研究肥料颗粒之间、肥料颗粒与施肥装置之间相互作用和颗粒群体的复杂流动现象。为确定肥箱直流电动机的扭矩和防堵装置直流电动机的扭矩,本文采用离散元仿真软件EDEM分析肥料运动规律,确定电动机的输出扭矩,为装置结构优化和试验研究提供参考依据[22-26]。
4.1 模型建立
(1)几何模型建立
为便于仿真模拟及计算,将与肥料颗粒运动过程中无接触部件去除,将Creo软件设计的侧深施肥装置以.igs格式导入EDEM软件中。虚拟试验时,根据文献设置EDEM软件的输入参数,螺旋钢丝采用钢材,弹性模量2.06×1011Pa,剪切模量7.8×1010Pa,泊松比0.3,密度7.9×103kg/m3;肥箱、施肥管、毛刷锁紧帽、毛刷、毛刷杆、齿轮环、刮肥杆和施肥靴采用有机玻璃,弹性模量2.4×109Pa,剪切模量8.6×108Pa,泊松比0.39,密度1.18×103kg/m3;施肥量调节机构和防堵排肥机构的壳体采用铝合金,弹性模量4.83×1010Pa,剪切模量1.7×1010Pa,泊松比0.42,密度2.7×103kg/m3。
(2)肥料颗粒模型建立
虚拟试验肥料颗粒选用尿素为研究对象,设置肥料颗粒直径为3 mm,并服从正态分布。根据文献[27]设置EDEM软件的输入参数,尿素剪切模量2.8×107Pa,弹性模量8.5×107Pa,泊松比0.51。尿素颗粒与有机玻璃的静摩擦因数0.43,与钢的静摩擦因数为0.5,与铝合金的静摩擦因数为0.51,尿素颗粒之间的静摩擦因数为0.64。
(3)其他参数设置
根据肥箱内实际情况,设置EDEM颗粒工厂以7 500个/s的速率生成初速度为零的颗粒,总量为15 000粒。仿真总时间为10 s,时间步长为3.9×10-6s,生成颗粒总时间为2 s,2~10 s肥料颗粒下落,螺旋钢丝和毛刷转动,转速均为15 r/min,水田侧深施肥装置施肥过程仿真如图3所示。
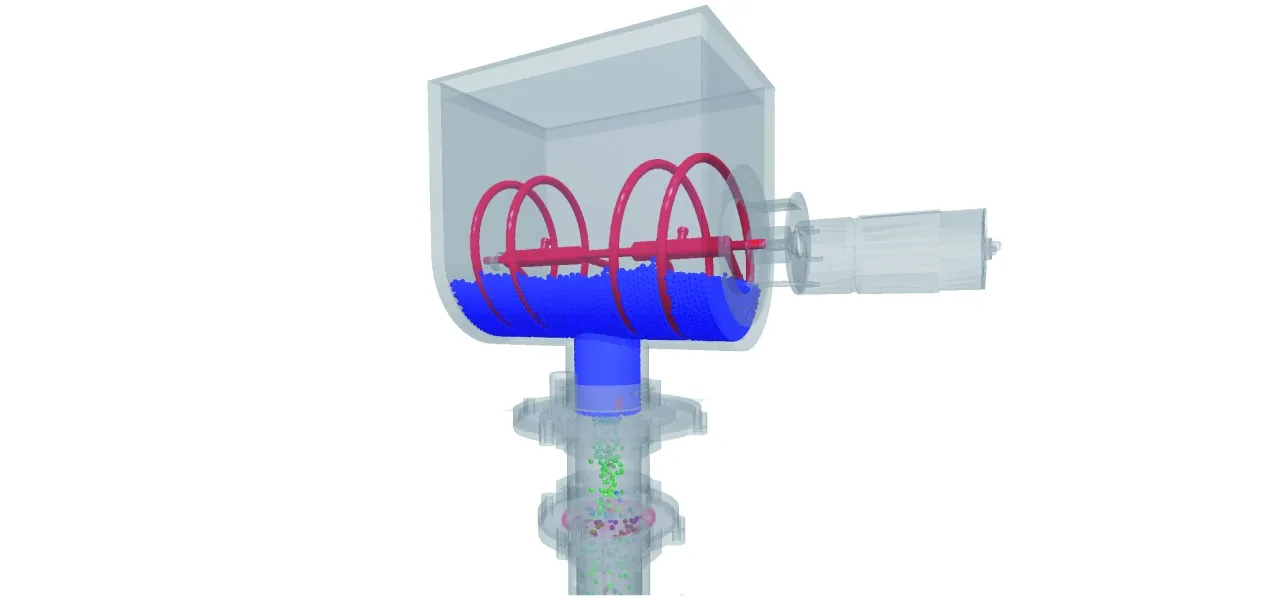
图3 EDEM施肥过程仿真图Fig.3 Simulation diagram of fertilizing process by EDEM software
4.2 仿真分析
4.2.1螺旋钢丝受力分析
由于螺旋钢丝的转速为15 r/min,在忽略离心力和轴承摩擦力的条件下,螺旋钢丝在转动过程中仅受到肥料颗粒的载荷。如图4a所示,用不同颜色表示螺旋钢丝受力大小,红色表示力较大,蓝色表示力较小。如图4b所示,将螺丝钢丝受力云图提取,圆圈处表示螺旋钢丝与肥料颗粒接触部位受力较大。
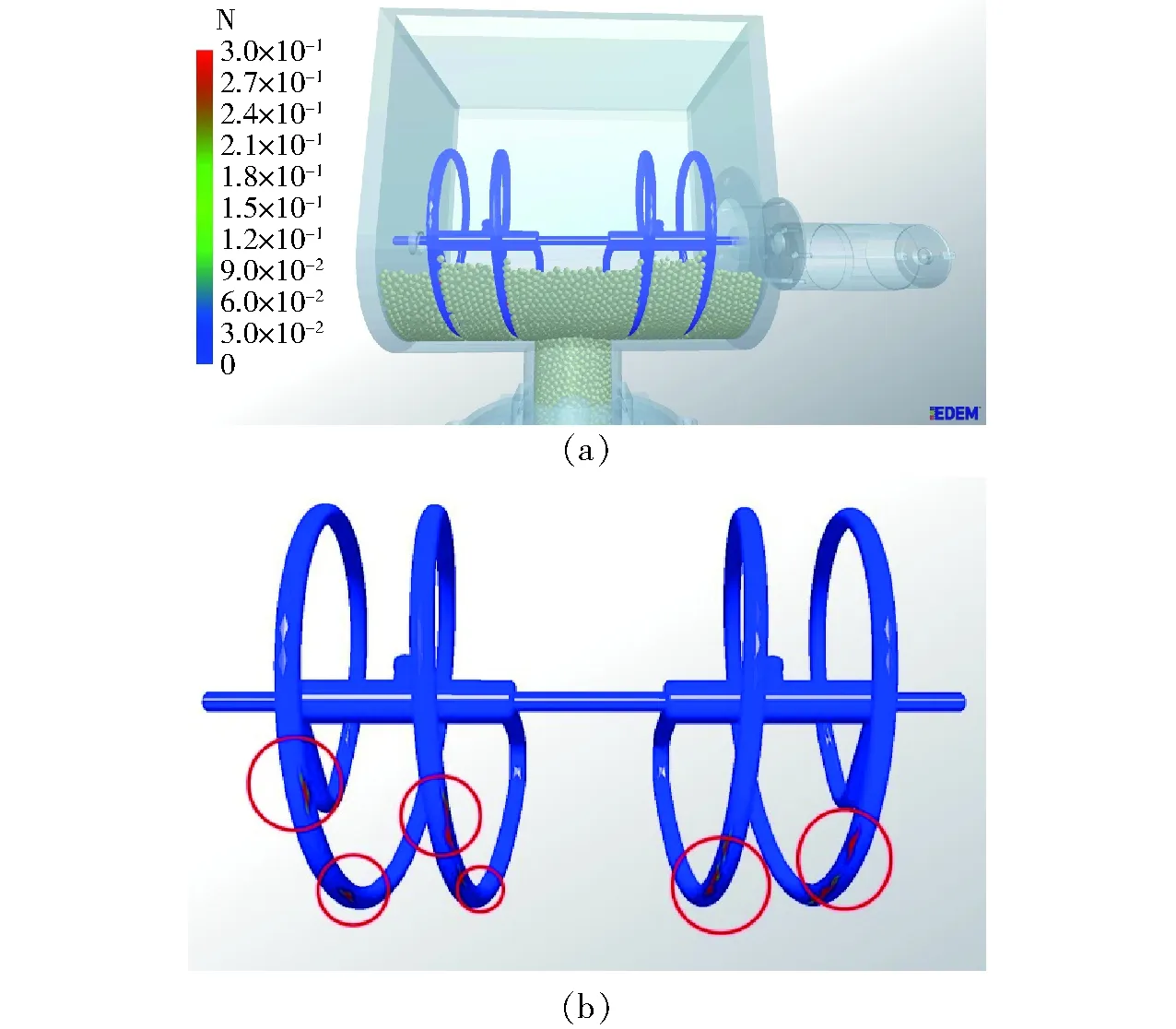
图4 螺旋钢丝受力图Fig.4 Force diagrams of spiral steel wire
将螺旋钢丝受力数据导出,间隔时间为0.1 s,在10 s的仿真时间内,螺旋钢丝受力的最大值Fl为0.289 N。由于肥料颗粒的平均直径dk为3 mm,则螺旋钢丝每隔3 mm受到肥料颗粒的作用力。假设螺旋钢丝各处受力均匀,且每隔3 mm受力均为0.289 N。
如图4b所示,螺旋钢丝的总长度为
L=2πra×4
(4)
式中ra——螺旋钢丝的回转半径,mm
螺旋钢丝受到的扭矩Ml为
(5)
螺旋钢丝的回转半径为47 mm,将式(4)代入式(5),确定螺旋钢丝受到的扭矩为5 345 N·mm。为保证螺旋钢丝转动平稳,肥箱直流电动机的输出扭矩应大于Ml。
4.2.2毛刷受力分析
由于毛刷的转速为15 r/min,在忽略离心力和肥料颗粒下落对毛刷杆、齿轮环和刮肥杆撞击的条件下,毛刷在转动过程中仅受到肥料颗粒的载荷,如图5所示。
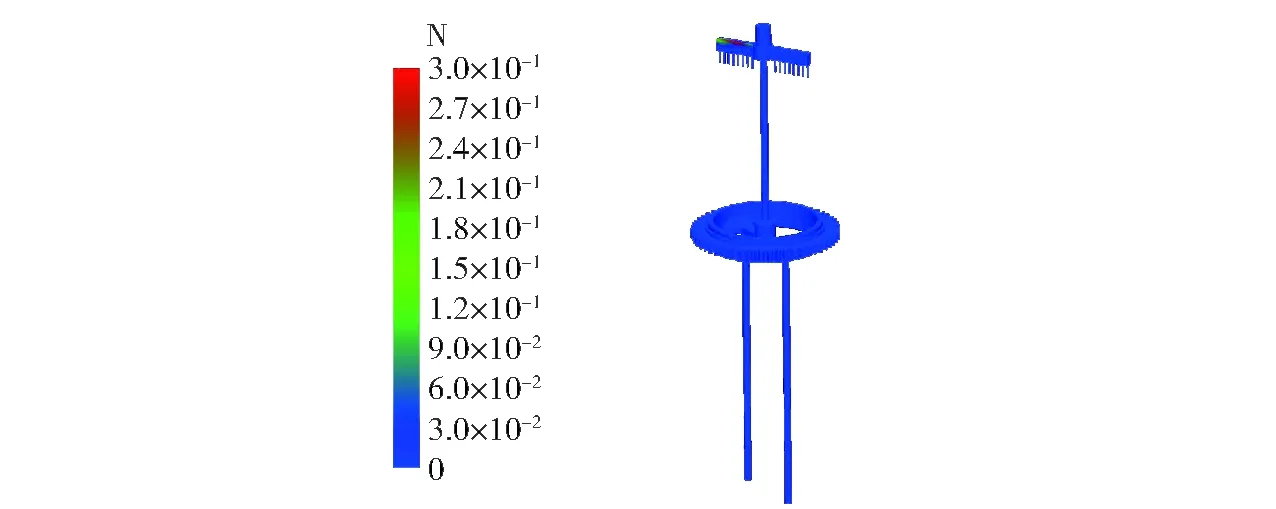
图5 毛刷受力图Fig.5 Force diagram of hairbrush
将毛刷受力数据导出,间隔时间为0.1 s,在10 s的仿真时间内,毛刷受力的最大值Fm为0.33 N。由于肥料颗粒的平均直径dk为3 mm,则毛刷每隔3 mm受到肥料颗粒的作用力。假设毛刷各处受力均匀,且各处受力均为0.33 N,毛刷受到的均布载荷q为
(6)
毛刷受到的扭矩Mm为
(7)
式中Lm——毛刷杆长度,mm
毛刷杆长度为40 mm,将式(6)代入式(7),确定毛刷受到的扭矩Mm为44 N·mm。
驱动齿轮和齿轮环相互啮合,齿轮环受到的扭矩即为毛刷受到的扭矩,在输出功率相同条件下,驱动齿轮的力矩为
(8)
式中Zq——驱动齿轮齿数
Zc——齿轮环齿数
驱动齿轮齿数Zq为10,齿轮环齿数Zc为55,代入式(8)可得,驱动齿轮的力矩Mq为8 N·mm。为保证防堵排肥机构工作顺畅,防堵装置直流电动机的输出扭矩应大于Mq。
5 台架试验与分析
为提高水田深施肥的施肥质量,对施肥装置进行试验研究。以装配外槽轮式排肥器的侧深施肥装置为对比对象,进行槽轮式水田侧深施肥装置和叶片调节式水田侧深施肥装置施肥性能对比试验。
5.1 试验材料与方法
试验材料为大颗粒包衣尿素,试验温度22℃,环境相对湿度35%,尿素颗粒不易潮解,尿素颗粒密度1.33×103kg/m3,肥料颗粒直径约3 mm。试验前,用孔径为7 mm的筛子,将结块的尿素颗粒筛出后,装入肥箱内进行试验。
试验地点为东北农业大学排种性能实验室,在JPS-12型排种性能检测试验台上分别安装槽轮式水田侧深施肥装置和叶片调节式水田侧深施肥装置进行对比试验,如图6所示。
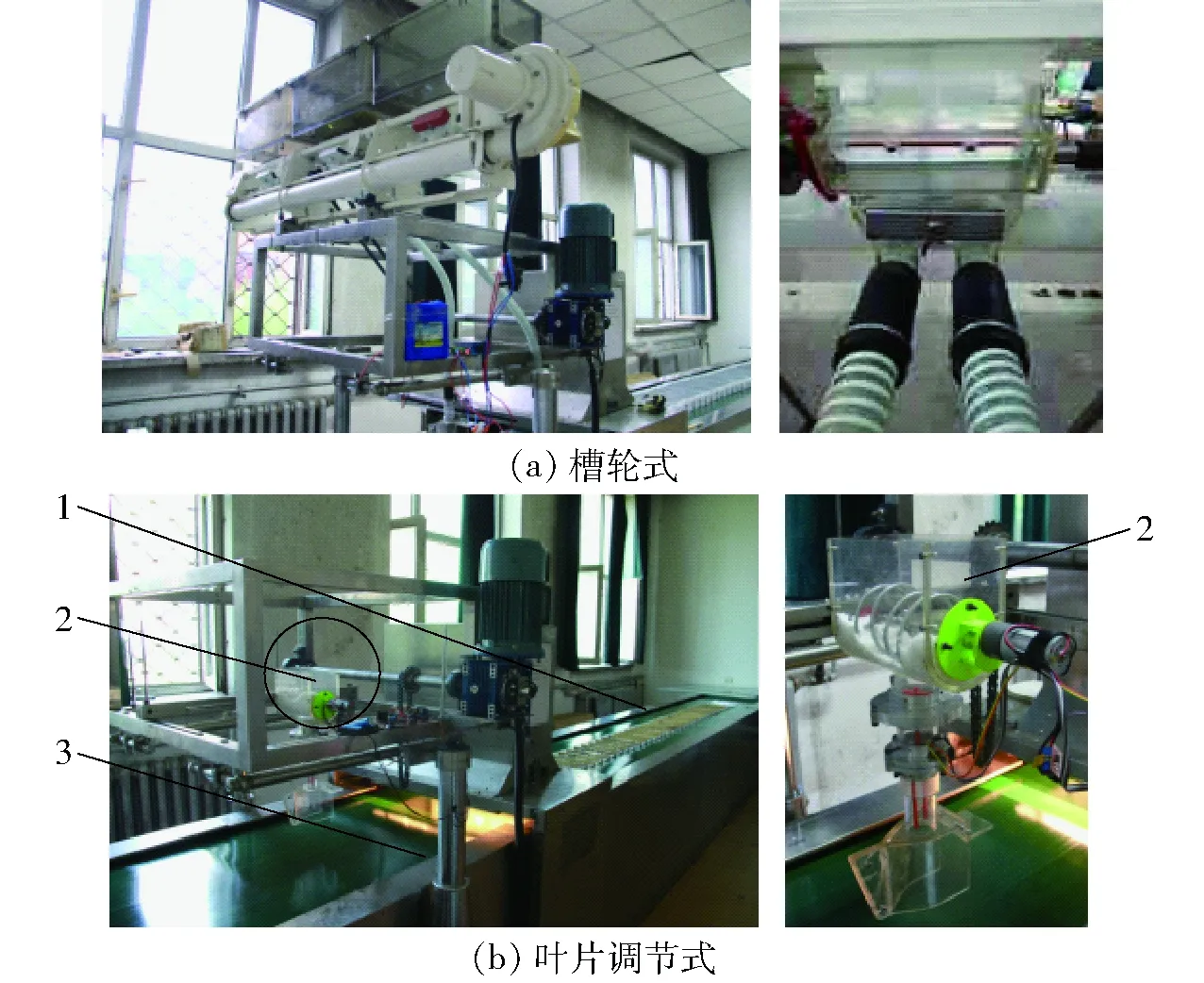
图6 水田侧深施肥装置试验台Fig.6 Test beds of side deep fertilizing device1.肥料收集器 2.叶片调节式水田侧深施肥装置 3.排种性能检测试验台
根据NY/T 1003—2006《施肥机械质量评价技术规范》,施肥稳定性是测量时间内施肥量的变化程度,施肥均匀性为沿机具前进方向10 cm长度连续等分不少于30段,分别收集掉在各小段内的肥料并称量。施肥稳定性和均匀性由施肥量均值、施肥量标准差和变异系数衡量。
施肥量均值X为
(9)
式中Xi——测量施肥稳定性时表示每次测量单位时间内下落肥料颗粒的质量,测量施肥均匀性时表示每小段内肥料颗粒的质量,g
m——测定次数
施肥量标准差S为
(10)
变异系数V为
(11)
施肥稳定性测量为静态测量,不考虑前进速度,槽轮式水田侧深施肥装置测量不同槽轮转速下的施肥稳定性,叶片调节式水田侧深施肥装置测量不同开口直径下的施肥稳定性。
施肥均匀性测量为动态测量,槽轮式水田侧深施肥装置测量不同槽轮转速和前进速度下施肥均匀性,叶片调节式水田侧深施肥装置测量不同开口直径和前进速度下施肥均匀性。
自制每小段长度为0.1 m,总长度为4 m的肥料收集器,并安放在排种带上,用于施肥均匀性测量时收集水田侧深施肥装置下落的肥料。试验时,通过调节JPS-12型排种试验台电动机变频器频率,控制排种带(肥料收集器)相对于水田侧深施肥装置反向运动,模拟水田侧深施肥装置前进速度。
5.2 试验结果与分析
为分析水田侧深施肥装置的施肥稳定性、施肥均匀性和施肥能力,进行单因子试验。
槽轮式水田侧深施肥装置选取槽轮转速和前进速度为试验因子,施肥量均值和变异系数为性能指标。叶片调节式水田侧深施肥装置选取开口直径和前进速度为试验因子,施肥量均值和变异系数为性能指标。
(1)施肥稳定性
施肥稳定性测量时,肥箱为满肥状态,且肥量低于肥料箱容积1/4时停止试验。用电子天平测量10 s内下落肥料的质量,重复5次,由式(9)~(11)计算施肥稳定性施肥量均值和施肥稳定性变异系数。
槽轮式水田侧深施肥装置调节槽轮转速,当槽轮转速分别为5、10、15、20、25 r/min时,计算施肥稳定性施肥量均值和施肥稳定性变异系数,试验结果如表1所示。
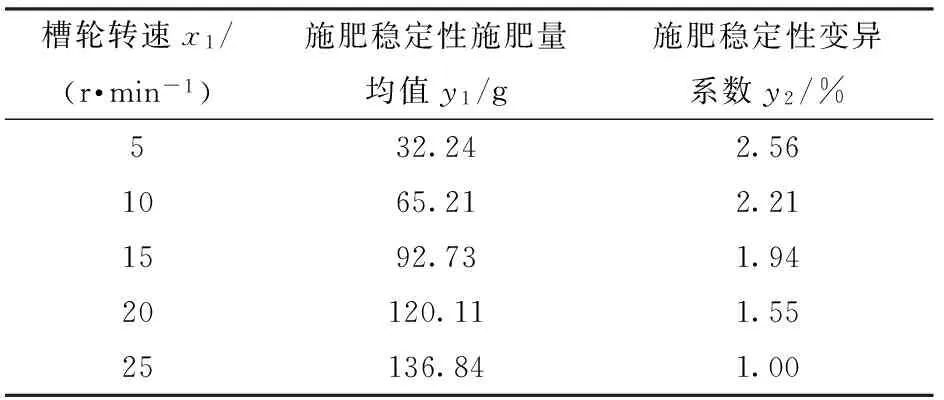
表1 槽轮式水田侧深施肥装置不同槽轮转速下的施肥稳定性Tab.1 Fertilizing stability at different rotation speeds of groove wheel for groove wheel type side deep fertilizing device
根据表1的试验数据进行方差分析,分析结果表明,槽轮转速对施肥稳定性施肥量均值和施肥稳定性变异系数模型显著,应用Design-Expert拟合出槽轮转速对施肥稳定性施肥量均值和施肥稳定性变异系数影响的回归方程分别为
(12)
y2=-0.076x1+2.99
(13)
叶片调节式水田侧深施肥装置调节开口直径,当开口直径分别为16、19、22、25、28 mm时,计算施肥稳定性施肥量均值和施肥稳定性变异系数,试验结果如表2所示。
根据表2的试验数据进行方差分析,分析结果表明,开口直径对施肥稳定性施肥量均值和施肥稳定性变异系数模型显著,应用Design-Expert拟合出开口直径对施肥稳定性施肥量均值和施肥稳定性变异系数影响的回归方程分别为
(14)
y2=-0.38x3+12.77
(15)
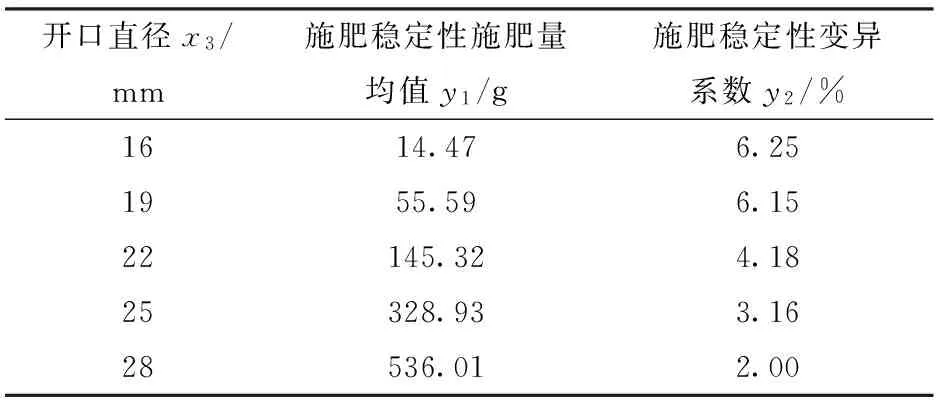
表2 叶片调节式水田侧深施肥装置不同开口直径下的施肥稳定性Tab.2 Fertilizing stability at different opening diameters for adjustable blade type side deep fertilizing device
槽轮式水田侧深施肥装置施肥稳定性试验结果表明,随槽轮转速的增加,施肥稳定性施肥量均值增加,施肥稳定性变异系数减小。叶片调节式水田侧深施肥装置施肥稳定性试验结果表明,随开口直径的增加,施肥稳定性施肥量均值增加,施肥稳定性变异系数减小。
根据NY/T 1003—2006要求施肥稳定性变异系数小于7.8%,由表1和表2可知,槽轮式和叶片调节式水田侧深施肥装置施肥稳定性变异系数达到有关标准要求。
(2)施肥均匀性
槽轮式水田侧深施肥装置施肥均匀性测量时,分别考察前进速度和槽轮转速对施肥均匀性施肥量均值和施肥均匀性变异系数的影响。叶片调节式水田侧深施肥装置施肥均匀性测量时,分别考察前进速度和开口直径对施肥均匀性施肥量均值和施肥均匀性变异系数的影响。用电子天平测量肥料收集器每小段盒子内肥料的质量,测量盒子的数量不少于30个,由式(9)~(11)计算施肥均匀性施肥量均值和施肥均匀性变异系数。
槽轮式水田侧深施肥装置调节槽轮转速为15 r/min,当前进速度分别为0.8、0.9、1.0、1.1、1.2 m/s时,计算施肥均匀性施肥量均值和施肥均匀性变异系数,试验结果如表3所示。
根据表3的试验数据进行方差分析,分析结果表明,前进速度对施肥均匀性施肥量均值模型显著,对施肥均匀性变异系数模型不显著,应用Design-Expert拟合出前进速度对施肥均匀性施肥量均值影响的回归方程为
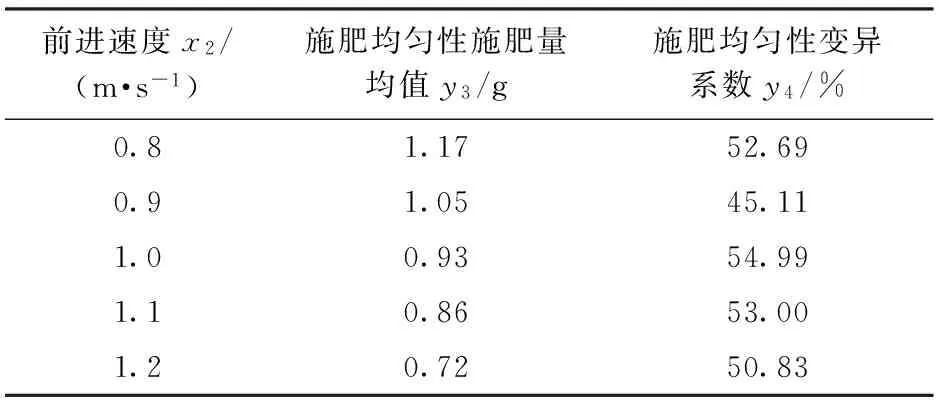
y3=-1.09x2+2.036 (16)
槽轮式水田侧深施肥装置调节前进速度为1.0 m/s,当槽轮转速分别为5、10、15、20、25 r/min时,计算施肥均匀性施肥量均值和施肥均匀性变异系数,试验结果如表4所示。
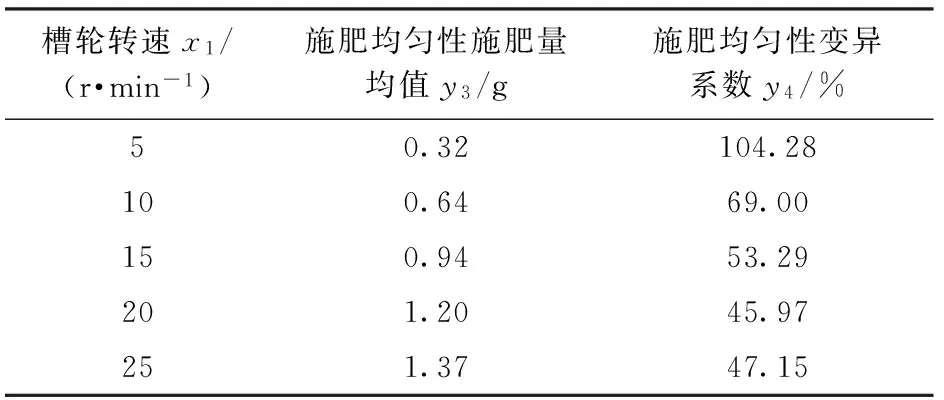
表4 槽轮式水田侧深施肥装置不同槽轮转速下的施肥均匀性Tab.4 Uniformity of fertilization at different rotation speeds of groove wheel for groove wheel type side deep fertilizing device
根据表4的试验数据进行方差分析,分析结果表明,槽轮转速对施肥均匀性施肥量均值和施肥均匀性变异系数模型显著,应用Design-Expert拟合出槽轮转速对施肥均匀性施肥量均值和施肥均匀性变异系数影响的回归方程分别为
y3=0.053x1+0.096
(17)
(18)
槽轮式水田侧深施肥装置施肥均匀性试验结果表明:随前进速度的增加,施肥均匀性施肥量均值减小,前进速度不影响施肥均匀性变异系数;随槽轮转速的增加,施肥均匀性施肥量均值增加,施肥均匀性变异系数减小。
根据NY/T 1003—2006要求施肥均匀性变异系数小于40%,由表4可知,槽轮式侧深施肥装置施肥均匀性变异系数均大于40%,未达到有关标准要求。
叶片调节式水田侧深施肥装置调节开口直径为22 mm,当前进速度分别为0.8、0.9、1.0、1.1、1.2 m/s时,计算施肥均匀性施肥量均值和施肥均匀性变异系数,试验结果如表5所示。
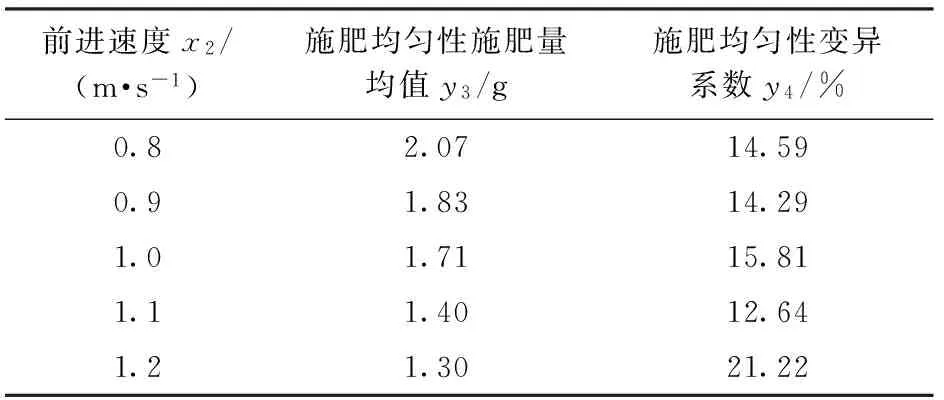
表5 叶片调节式水田侧深施肥装置不同前进速度下的施肥均匀性Tab.5 Uniformity of fertilization at different forward speed for adjustable blade type side deep fertilizing device
根据表5的试验数据进行方差分析,分析结果表明,前进速度对施肥均匀性施肥量均值模型显著,对施肥均匀性变异系数模型不显著,应用Design-Expert拟合出前进速度对施肥均匀性施肥量均值影响的回归方程为
y3=-1.97x2+3.632
(19)
叶片调节式水田侧深施肥装置调节前进速度为1 m/s,当开口直径分别为16、19、22、25、28 mm时,计算施肥均匀性施肥量均值和施肥均匀性变异系数,试验结果如表6所示。
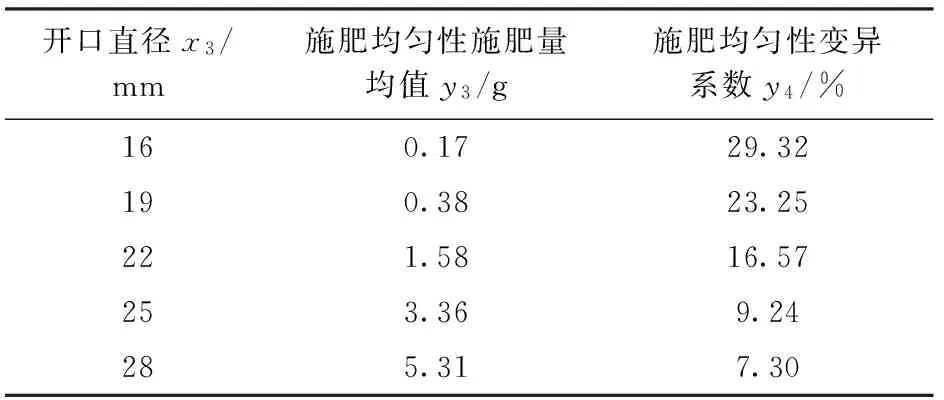
表6 叶片调节式水田侧深施肥装置不同开口直径下的施肥均匀性Tab.6 Uniformity of fertilization at different opening diameters for adjustable blade type side deep fertilizing device
根据表6的试验数据进行方差分析,分析结果表明,开口直径对施肥均匀性施肥量均值和施肥均匀性变异系数模型显著,应用Design-Expert拟合出开口直径对施肥均匀性施肥量均值和施肥均匀性变异系数影响的回归方程分别为
(20)
y4=-1.935x3+59.706
(21)
叶片调节式水田侧深施肥装置施肥均匀性试验结果表明:随前进速度的增加,施肥均匀性施肥量均值减小,前进速度不影响施肥均匀性变异系数;随开口直径的增加,施肥均匀性施肥量均值增加,施肥均匀性变异系数减小。
当开口直径为16 mm时,施肥均匀性变异系数达到29.32%。将施肥均匀性变异系数40%代入式(21),获得最小开口直径为10 mm。由于在叶片组成的开口中间有直径为3 mm的毛刷连接杆,所以当开口直径为10 mm时,毛刷连接杆和叶片之间的距离仅有3.5 mm。台架试验结果表明,当开口直径小于16 mm时,肥料下落不顺畅,甚至出现断条,其原因为某些肥料颗粒尺寸过大和肥料颗粒间摩擦力的作用,使得肥料颗粒卡在毛刷杆和叶片之间,导致其他肥料颗粒无法下落。为保证肥料颗粒下落顺畅,开口直径应大于16 mm,则式(21)中x3的定义域为x3>16 mm,式(14)、(15)、(20)中x3的定义域均为x3>16 mm。
由式(14)、(20)可知,叶片调节式水田侧深施肥装置施肥稳定性和施肥均匀性的施肥量均值随开口直径的增加而增加;由式(19)可知,施肥均匀性施肥量均值随前进速度的增加而减小。当开口直径x3为16 mm,前进速度x2为1.2 m/s,测量施肥均匀性施肥量均值最小值为0.15 g,即长为0.1 m(每小段肥料收集盒的长度)、宽为0.3 m(水稻秧苗行距)矩形内的施肥量平均值最小值为0.15 g,平均施肥量为50 kg/hm2;当开口直径x3为最大值28 mm,前进速度x2为0.8 m/s时,测量施肥量均值最大值为5.94 g,平均施肥量为1 980 kg/hm2。试验结果表明,施肥装置的施肥能力满足60~930 kg/hm2的农艺要求。
通过对槽轮式和叶片调节式水田侧深施肥装置进行施肥稳定性和施肥均匀性的测定结果可知,槽轮式水田侧深施肥装置施肥稳定性达到行业标准要求,施肥均匀性指标未达到行业标准要求,而叶片调节式水田侧深施肥装置施肥稳定性和施肥均匀性指标满足行业标准要求。研究结果表明:本文设计的叶片调节式水田侧深施肥装置在施肥质量上优于槽轮式水田侧深施肥装置。
6 结论
(1)设计了叶片调节式水田侧深施肥装置,应用水田侧深施肥肥量调节装置计算机优化软件V1.0优化求解施肥量调节机构结构参数,通过施肥量调节机构受力分析,确定步进电动机的输出扭矩。
(2)建立了叶片调节式侧深施肥装置仿真模型,应用离散元EDEM软件进行排肥虚拟试验,分析螺旋钢丝和毛刷在工作时受到肥料颗粒的作用力,从而确定肥箱直流电动机和防堵装置直流电动机的输出扭矩。
(3)通过JPS-12型排种性能检测试验台对槽轮式和叶片调节式水田侧深施肥装置进行施肥性能研究,获得了槽轮式水田侧深施肥装置的槽轮转速和前进速度对施肥稳定性和均匀性影响规律,叶片调节式水田侧深施肥装置的开口直径和前进速度对施肥稳定性和均匀性影响规律。对比试验结果表明:槽轮式水田侧深施肥装置施肥稳定性达到行业标准要求,施肥均匀性指标未达到行业标准要求,而叶片调节式水田侧深施肥装置施肥稳定性和施肥均匀性指标满足行业标准要求。叶片调节式水田侧深施肥装置在施肥质量上优于槽轮式水田侧深施肥装置,施肥能力满足农艺要求。
1陈长海,许春林,毕春辉,等.水稻插秧机侧深施肥技术及装置的研究[J]. 黑龙江八一农垦大学学报,2012,24(6):10-12.
CHEN Changhai,XU Chunlin,BI Chunhui,et al. Researching of rice transplanter deep side fertilizing technology and device[J]. Journal of Heilongjiang Bayi Agricultural University,2012,24(6):10-12. (in Chinese)
2鲍秉启,安龙哲,胡文英.我国和日本等国水田机械发展概况[J].农机化研究,2002,24(3):23-25.
BAO Bingqi,AN Longzhe,HU Wenying. The paddy field mechanization state in Japan China[J]. Journal of Agricultural Mechanization Research,2002,24(3):23-25. (in Chinese)
3潘圣刚,莫钊文,罗锡文,等.机械同步深施肥对水稻群体质量及产量的影响[J].华中农业大学学报,2013,32(2):1-5.
PAN Shenggang,MO Zhaowen,LUO Xiwen,et al. Effects of deeply mechanized fertilizer application on the quality and grain yield of direct seedling rice[J]. Journal of Huazhong Agricultural University,2013,32(2):1-5. (in Chinese)
4GAADI K A,AYERS P D. Integrating GIS and GPS into a spatially variable rate herbicide application system[J]. Applied Engineering in Agricultural,1999,5(4):255-262.
5尹强,邹德堂.云天化侧深专用肥对水稻产量及品质的影响[J].现代化农业,2016(2):17-18.
6陈雄飞,罗锡文,王在满,等.水稻穴播同步侧位深施肥技术试验研究[J].农业工程学报,2014,30(16):1-7.
CHEN Xiongfei,LUO Xiwen,WANG Zaiman,et al. Experiment of synchronous side deep fertilizing technique with rice hill-drop drilling[J].Transactions of the CSAE,2014,30(16):1-7.(in Chinese)
7曾山,汤海涛,罗锡文,等. 同步开沟起垄施肥水稻精量旱穴直播机设计与试验[J]. 农业工程学报,2012,28(20):12-19.
ZENG Shan,TANG Haitao,LUO Xiwen,et al. Design and experiment of precision rice hill-drop drilling machine for dry land with synchronous fertilizing[J]. Transactions of the CSAE,2012,28(20):12-19.(in Chinese)
8胡红,李洪文,李传友,等.稻茬田小麦宽幅精量少耕播种机的设计与试验[J].农业工程学报,2016,32(4):24-32.
HU Hong,LI Hongwen,LI Chuanyou,et al. Design and experiment of broad width and precision minimal tillage wheat planter in rice stubble field[J]. Transactions of the CSAE,2016,32(4):24-32.(in Chinese)
9陈进,周韩,赵湛,等.基于EDEM的振动种盘中水稻种群运动规律研究[J].农业机械学报,2011,42(10):79-83.
CHEN Jin,ZHOU Han,ZHAO Zhan,et al. Analysis of rice seeds motion on vibrating plate using EDEM[J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(10):79-83.(in Chinese)
10孟志军,赵春江,付卫强,等.变量施肥处方图识别与位置滞后修正方法[J].农业机械学报,2011,42(7):204-209.
MENG Zhijun,ZHAO Chunjiang,FU Weiqiang,et al. Prescription map identification and position lag calibration method for variable rate application of fertilizer[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(7):204-209.(in Chinese)
11金诚谦,吴崇友.2BSF-4型种水同位施肥坐水播种机[J].农业机械学报,2007,38(7):71-74.
JIN Chengqian,WU Chongyou. Field performance test and design principle of 2BSF-4 irrigating-sowing machine[J]. Transactions of the Chinese Society for Agricultural Machinery,2007,38(7):71-74.(in Chinese)
12周韦,王金峰,王金武,等.基于EDEM的水田深施肥机构螺旋钢丝的数值模拟与分析[J].农机化研究,2015,37(1):27-30.
ZHOU Wei,WANG Jinfeng,WANG Jinwu,et al. Numerical simulation and analysis of a fertilizer can on fertilizer spreader based on EDEM[J].Journal of Agricultural Mechanization Research,2015,37(1):27-30.(in Chinese)
13苑进,刘勤华,刘雪美,等.配比变量施肥中多肥料掺混模拟与掺混腔结构优化[J/OL].农业机械学报,2014,45(6):125-132.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140620&flag=1.DOI:10.6041/j.issn.1000-1298.2014.06.020.
YUAN Jin,LIU Qinhua,LIU Xuemei,et al. Simulation of multi-fertilizers blending process and optimization of blending cavity structure in nutrient proportion of variable rate fertilization[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(6):125-132.(in Chinese)
14东北农业大学.水田侧深施肥肥量调节装置:2010105243020[P].2012-08-22.
15东北农业大学.水田施肥深度调节装置:20131021815960[P].2015-04-08.
16东北农业大学.水田施肥装置施肥位置与运输位置转换机构:201410151999X[P].2016-02-03.
17东北农业大学.固态化肥施肥量调控机构:201621344602X[P].2017-06-20.
18东北农业大学.电动式水田双行施肥与中耕除草组合机:2016213376718[P].2017-06-20.
19杨欣伦,王金武,王金峰,等.叶片式排肥器参数优化设计与分析[J].农机化研究,2015,37(7):160-163.
YANG Xinlun,WANG Jinwu,WANG Jinfeng,et al.Parameters optimization design and analysis of vaned fertilizer distributing device[J]. Journal of Agricultural Mechanization Research,2015,37(7):160-163.(in Chinese)
20东北农业大学.水田侧深施肥肥量调节装置计算机优化软件V1.0: 2014SR034199[Z].2014-03-26.
21WANG Jinfeng,ZOU Detang,WANG Jinwu,et al.Optimization desing on deep-fertilization fertilizer amount adjusting mechanism for paddy field[J]. Computer and Computing Technologies in Agriculture,2013,7(1):128-136.
22陈腾,翟超男,邢志中,等.基于EDEM的内充式花生排种器排种过程的离散元仿真研究[J].安徽农业科学,2016,44(16):250-253,278.
CHEN Teng,ZHAI Chaonan,XING Zhizhong,et al.Discrete element simulation study of seed metering process of inside-filling meter based on EDEM[J].Journal of Anhui Agricultural Sciences,2016,44(16):250-253,278.(in Chinese)
23王福林,尚家杰,刘宏新,等.EDEM颗粒体仿真技术在排种机构研究上的应用[J].东北农业大学学报,2013,44(2):110-114.
WANG Fulin,SHANG Jiajie,LIU Hongxin,et al. Application of EDEM particles simulation technology on seed-metering device research[J].Journal of Northeast Agricultural University,2013,44(2):110-114.(in Chinese)
24左兴健,武广伟,付卫强,等.风送式水稻侧深精准施肥装置的设计与试验[J].农业工程学报,2016,32(3):14-21.
ZUO Xingjian,WU Guangwei,FU Weiqiang,et al. Design and experiment on air-blast rice side deep precision fertilization device[J]. Transactions of the CSAE,2016,32(3):14-21.(in Chinese)
25王金武,唐汉,王金峰,等.指夹式玉米精量排种器导种投送运移机理分析与试验[J/OL].农业机械学报,2017,48(1):29-37,46.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170105&flag=1&journal_id= jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.005.
WANG Jinwu,TANG Han,WANG Jinfeng,et al. Analysis and experiment of guiding and dropping migratory mechanism on pickup finger precision feed metering device for corn[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):29-37,46.(in Chinese)
26胡炼,罗锡文,林潮兴,等.1PJ-4.0型水田激光平地机设计与试验[J/OL].农业机械学报,2014,45(4):146-151.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140423&flag=1&journal_id= jcsam.DOI:10.6041/j.issn.1000-1298.2014.04.023.
HU Lian,LUO Xiwen,LIN Chaoxing,et al. Development of 1PJ-4.0 laser leveler installed on a wheeled tractor for paddy field[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(4):146-151.(in Chinese)
27WANG Jinfeng,ZOU Detang,WANG Jinwu,et al.Testing and analysis of the shear modulus of urea granules[J].Computer and Computing Technologies in Agriculture,2013,7(1):137-144.
