温室穴盘苗并联高速移栽机器人运动误差分析与试验
2018-04-02杨启志孙梦涛石新异毛罕平
杨启志 孙梦涛 蔡 静 石新异 毛罕平 顾 俊
(江苏大学农业装备工程学院, 镇江 212013)
0 引言
穴盘苗移栽是设施农业育苗生产及移栽中的主要作业之一,目前我国的穴盘苗移栽主要以人力和半自动移栽机为主,劳动强度大、效率低下,难以保证移栽质量及规模化发展[1-2]。因此研究温室穴盘苗高速自动移栽机器人,尤其是高速剔苗、补苗的机器人,并进行相关运动误差分析,对降低生产成本、提高生产能力以及促进设施农业生产力发展具有重要的意义。国外一些专家对此作了大量研究,文献[3-4]研发了一套配备图像识别功能的三坐标结构移栽机器人,仅处于原理样机阶段。荷兰飞梭国际贸易工程公司(Visser Group, Holland)研制生产的PC-21型穴盘苗全自动移栽机,主体结构为龙门架式三坐标机构,效率高,但不适于高速剔苗、补苗作业[5]。2005年以来,崔巍[6]设计的旱地自动移栽机、蒋焕煜等[7]设计的一种搭载了机器视觉识别系统的移栽机器人,也不适于高速的剔苗、补苗作业。2013年,江苏大学的綦春晖[8]将平面二自由度并联机构Diamond 机构应用于穴盘苗高速补苗、移栽作业,开发了一套对应的视觉识别系统,并设计出相应的实物样机,但需要精确的穴盘横向进给系统。
针对这些问题,笔者设计了一种以并联机构为主体的移栽机器人系统,综合并联机构速度快、精度高、相对刚度大、动态性能好等一系列优点,可以满足现有设施农业对高速移栽作业的需求,同时还可以满足设施农业对高速剔苗、补苗作业要求。然而移栽机器人在实际的工作环境中会存在机构的装配误差、柔性变形误差、构件的质量等因素影响运动精度从而导致运动误差[9]。在移栽操作中运动精度作为并联机器人一项最重要的性能指标,很大程度决定并联移栽机器人的工作性能[10-12]。本文在前期工作的基础上,针对该移栽机器人主体并联机构的动态精度问题,利用ADAMS刚柔耦合模型进行仿真,并搭建实物样机进行定位精度试验和运动误差试验。
1 虚拟样机模型说明
1.1 样机并联机构
移栽机器人主体并联机构如图1所示,采用三支链并联结构,上平台为静平台,所有驱动器置于上平台上与机架固定。其动平台的方位特征集为
(1)
式中t3——移动元素,右上标3表示具有3个移动元素
r0——转动元素,右上标0表示具有0个转动元素
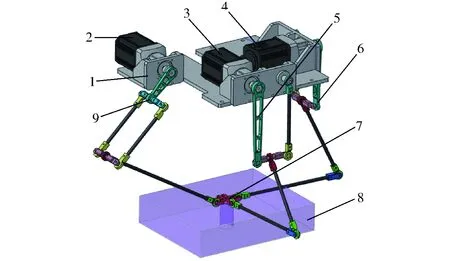
图1 并联机构Fig.1 Parallel structure1.静平台 2、3、4.驱动器 5.A支链 6.B支链 7.动平台8.工作空间 9.C支链
为使并联机构达到高速高频运动要求,并联机构的各支链中除驱动臂和轴承为钢材料外,关节均为铝材料,杆件均为碳纤维杆。应移栽需求,给定工作空间为594 mm×480 mm×125 mm的立方体空间。
1.2 动平台模块化设计
对于并联机构来说,其本身就具有优异的柔性化功能,它能够完成所有在一定工作空间内需要进行三平移且负载要求不太高的作业任务,所以该移栽机器人的功能扩展,主要是通过对动平台上的末端执行器进行模块化设计来实现。将末端执行器模块化,可以将多种生产模式结合,大幅减少成本。为此,本文设计了5种配套末端执行器,可以执行不同任务,分别为单爪型取苗器、双爪型取苗器、除坏苗用剔苗取苗器、角度移栽用角度取苗器、扦插作业用扦插取苗器。
对于并联移栽机器人来说,当其支链的结构形式和尺寸形状材料确定以后,动平台质量的变化会很大程度上影响并联机构运动性能[13-15]。设计的上述5种末端执行器的质量如表1所示。
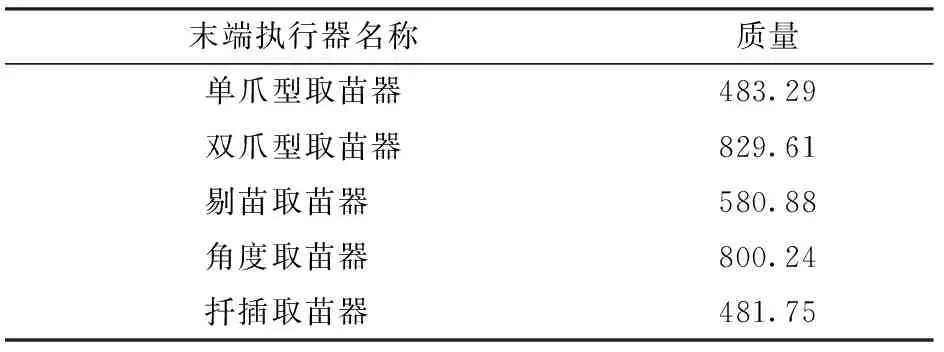
表1 末端执行器质量统计Tab.1 Statistics of end effector mass g
2 动态精度分析
在并联机器人追求高速的同时,系统的惯性力也急剧增加,构件的柔性变形会引起系统的弹性振动,导致机器人的运动精度迅速降低,也使得系统的运动学、动力学性能受到很大影响[16],使并联机构系统的精确控制面临更大困难[17-19]。所以在研究分析并联机构高速运动性能时,将构件弹性变形造成的动态精度问题考虑在内,对认识机构使用条件以及设计控制系统有着重要的指导意义[20-21]。
2.1 ADAMS刚柔耦合模型
在讨论机构动力学问题建立虚拟样机时,由于大部分构件为对称结构,其质心位置与实际情况基本吻合,所以采用简化模型设定准确质量的方法将产生良好的效果。图1为该并联机构在Pro/E中建立的样机模型,所有零件基本按照实际加工零件所绘制,将其简化为图2所示的模型,其中银灰色部分为45号钢材料,驱动臂需经过调质处理,蓝色部分为7075铝合金,黑色部分为碳纤维杆,使用HM高模量碳纤维,其拉伸模量为400 GPa,拉伸强度为2.4 GPa。紫色半透明部分为工作空间。将图2的模型导入到ADAMS中建立虚拟样机模型并加上材料类型和约束副进行动力学仿真。
通过Pro/E和ADAMS联合仿真来使动平台完成预定动作。其步骤为:在Pro/E中约定动平台的运动规律。本文尝试采用冲击较低、效率较高的3-4-5次多项式运动规律作为动平台的运动规律。限定最大加速度为30 m/s2,以一次移栽过程为研究对象(记从取到苗至移动到需要栽植的位置为一个周期,即为有负载的情况,而回程为空载,不记在此周期内),其实际运动轨迹如图3所示。其实际大小需要根据苗高和生长状态、叶片的展开程度作调整,所以它们各点的曲率并不一样,需要通过控制系统根据实际需要作具体的调整。
在Pro/E中给定动平台运动规律,测量各驱动角的角度-时间数据。导入上述步骤中的驱动角变化规律,并在驱动副中调用(图4)。
通过动力学仿真得到动平台的速度与加速度幅值如图5所示,在采用3-4-5次多项式运动规律时,动平台参考点的速度、加速度曲线变化平缓,无冲击。
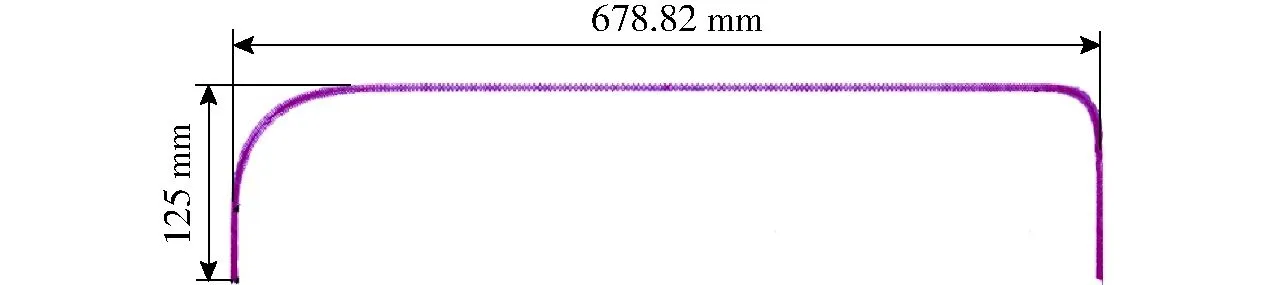
图3 实际移栽轨迹Fig.3 Actual transplanting trajectory
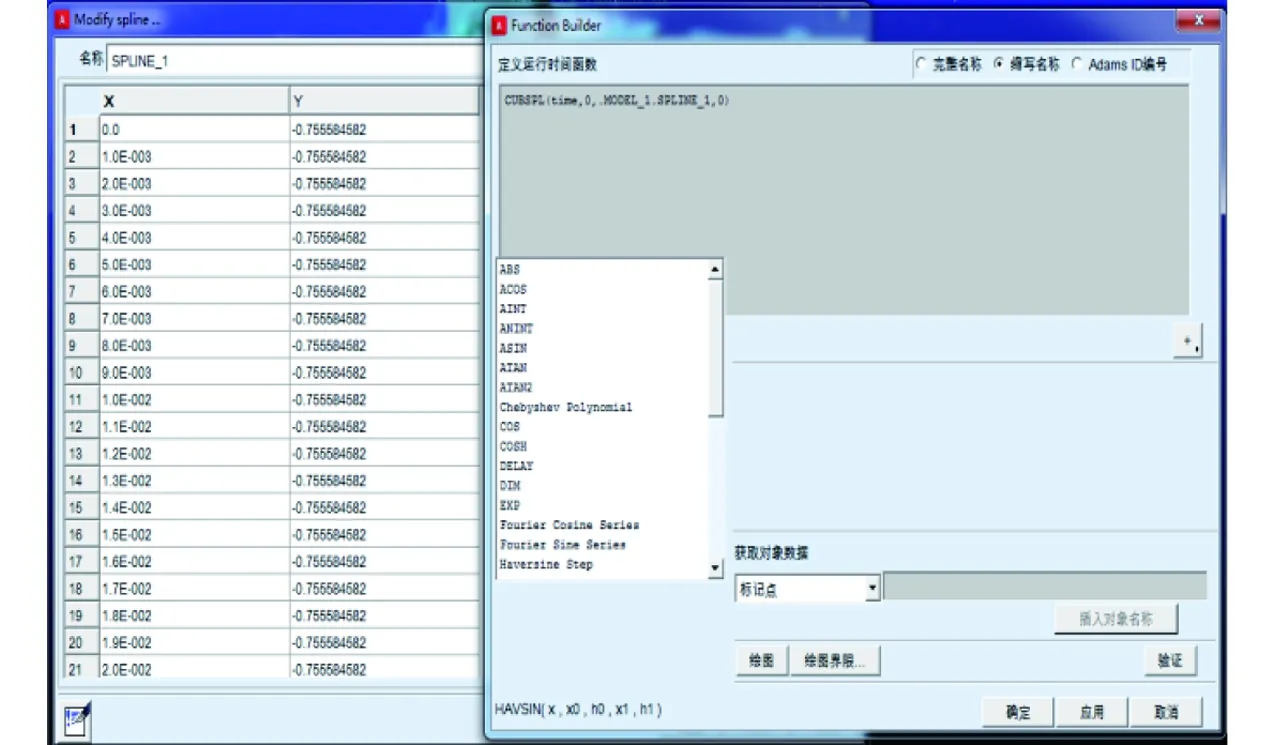
图4 导入驱动角数据并调用Fig.4 Import and call data of driving angle
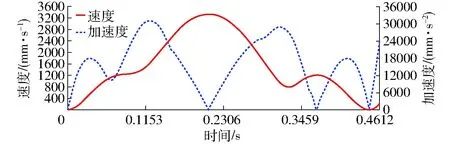
图5 实际移栽轨迹下的速度幅值与加速度幅值Fig.5 Velocity and acceleration amplitude in actual transplanting trajectory
相应地,测量各驱动力矩如图6所示,其A支链、B支链、C支链驱动力矩峰值分别为17.35、11.32、14.85 N·m。驱动力矩曲线变化平稳,没有大的波动点。
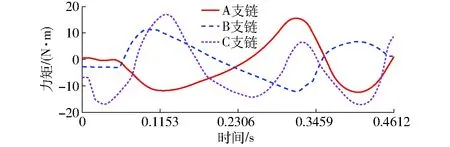
图6 各支链的驱动力矩Fig.6 Diagram of driving torque of three branch chains
在此基础上,再测量动平台的位移时,即可真实反映出动平台受驱动支链的驱动时,在支链铰链约束下的运动情况。建立刚柔耦合模型,进行动力学仿真时,即可研究动平台在运动过程中的位移误差情况。
使用ADAMS的Flex模块将所有碳纤维杆和驱动臂柔性化。以此进行杆件全柔性化仿真,其过程中某一时刻状态如图7所示。
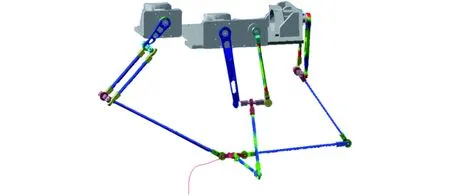
图7 杆件全柔性化仿真Fig.7 Flexible simulation of all links
2.2 轨迹误差情况
通过杆件全柔性化仿真可以得到动平台在相同轨迹下的位置偏移情况,图8为位置幅值偏移情况。
图8a为幅值整体图,图8b~8d为3个分块放大图。由图8a可知,大部分位置误差都不大,但在0.3~0.4 s间出现了沿理想轨迹的小幅度摆动现象,由于位处轨迹中段,与取投苗精度无关,所以要求不高。图8b、8d分别为动平台取苗阶段(轨迹前50 mm)和投苗阶段(轨迹后50 mm)的位移误差,其最大值分别约为0.537 mm和0.284 mm,对于取投苗来说,这个误差在可接受的范围以内,需要指出的是,对于该路线的仿真,取苗阶段是从静止阶段开始运动,而投苗阶段是从运动阶段到停止,它们运行状态不一样,但具有代表性,用于分析并联机构在运行时从轨迹开始运行到轨迹结束停止的运动规律,具有较高的参考价值。
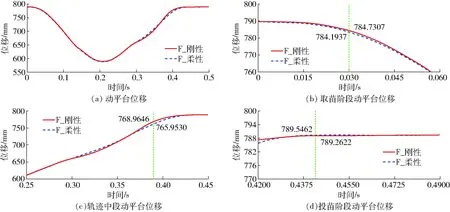
图8 位置幅值偏移情况Fig.8 Deformations of trajectory
如图9所示该移栽机器人在此条轨迹下,其取投苗位置误差很小,在允许范围内,而在移苗过程中有较大的误差,需要通过控制系统的设计来调控,不过整体上符合移栽的要求,即取投苗位置精度要求高,其他位置精度要求低。
2.3 动平台质量对轨迹误差的影响
若将动平台的质量变化考虑在内,则通过重复前面的仿真过程,统计得到表2所示变形数据。
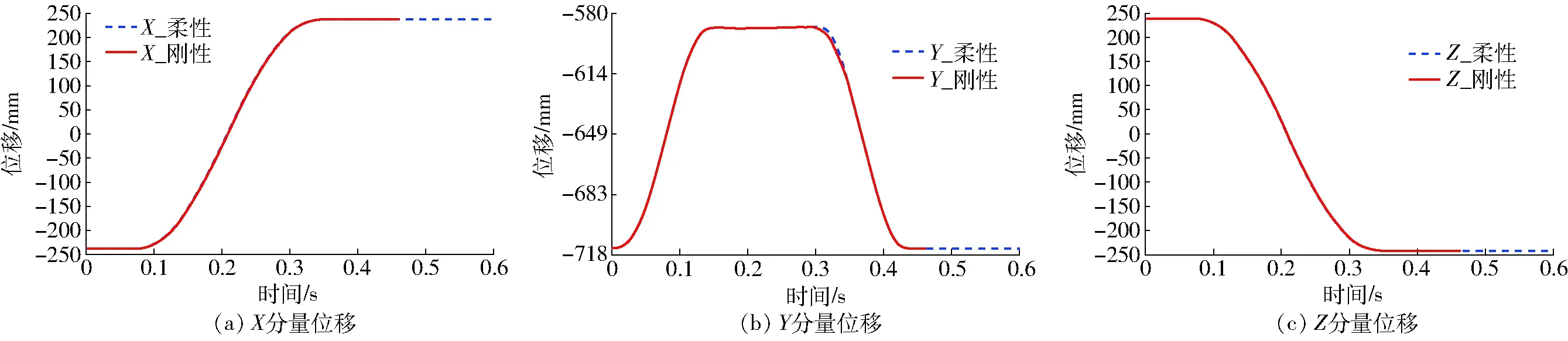
图9 X、Y、Z分量的位移Fig.9 Displacement of X, Y and Z coordinate components
图10~12分别为动平台位移、取苗阶段位移以及中间阶段位移随动平台质量变化情况。
图11和图12分别为开始阶段和中间阶段的曲线,与前文所述规律相同,开始阶段的误差都较小,随着动平台质量增加误差逐步增大,中间阶段误差沿理想曲线摆动,同样随着动平台质量增加误差逐步增大,在动平台质量为900 g以下时,中间阶段误差沿理想曲线摆动,整体满足移栽要求,此时中间阶段震荡对投苗影响较小,满足取投苗位置精度要求高,其他位置精度要求低。表2中,投苗阶段统计方式与之前有所不同,由图13的曲线发现,末尾阶段对投苗影响较大。驱动器到位后,伺服电机是锁死的,其角度不再变化,此时动平台是沿理想曲线振荡,然后逐步趋于稳定,之前的分析由于趋于稳定的过程很短,所以并未发现此现象,而此时的误差沿理想曲线摆动发生在投苗末尾阶段,末尾阶段振荡过程对投苗的影响较大,尤其在动平台质量达到900 g之后,其振荡误差的幅值已经达到了3.26 mm,投苗会很不稳定,必须等待振荡结束后才能投苗或者降低运行速度,也就是说,在该运行速度与加速度规律下,其实际所需的投苗时间会大于理论上的投苗时间,需要用控制进行补偿。
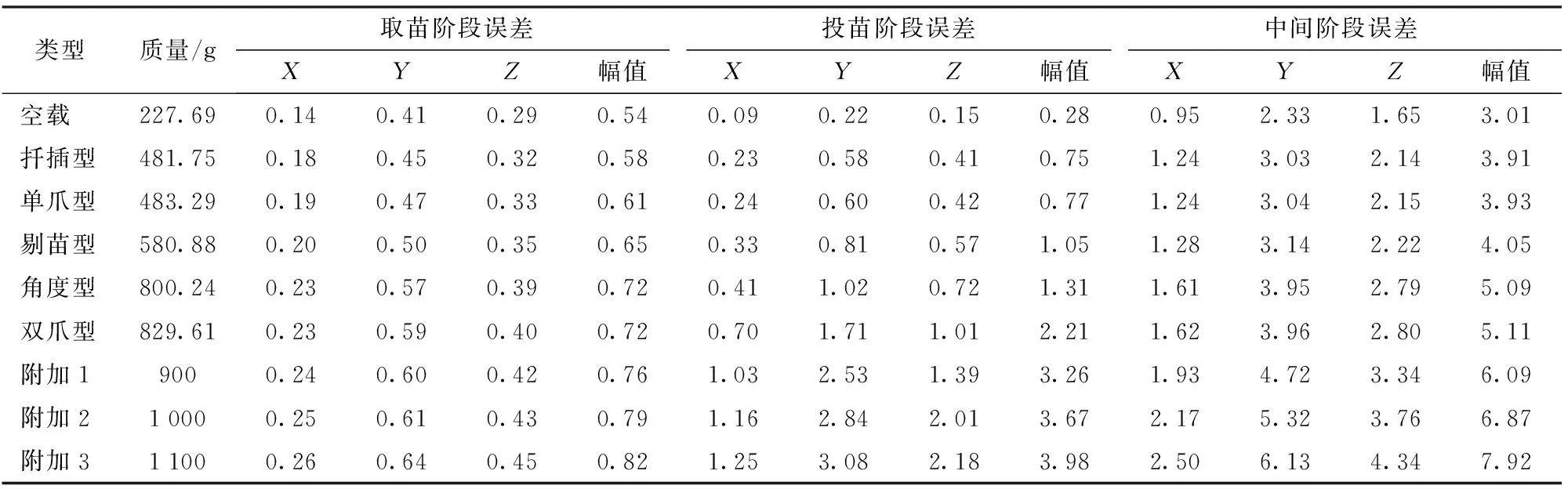
表2 动平台质量变化对位移误差的影响Tab.2 Effect of changes of moving platform mass on displacement error mm
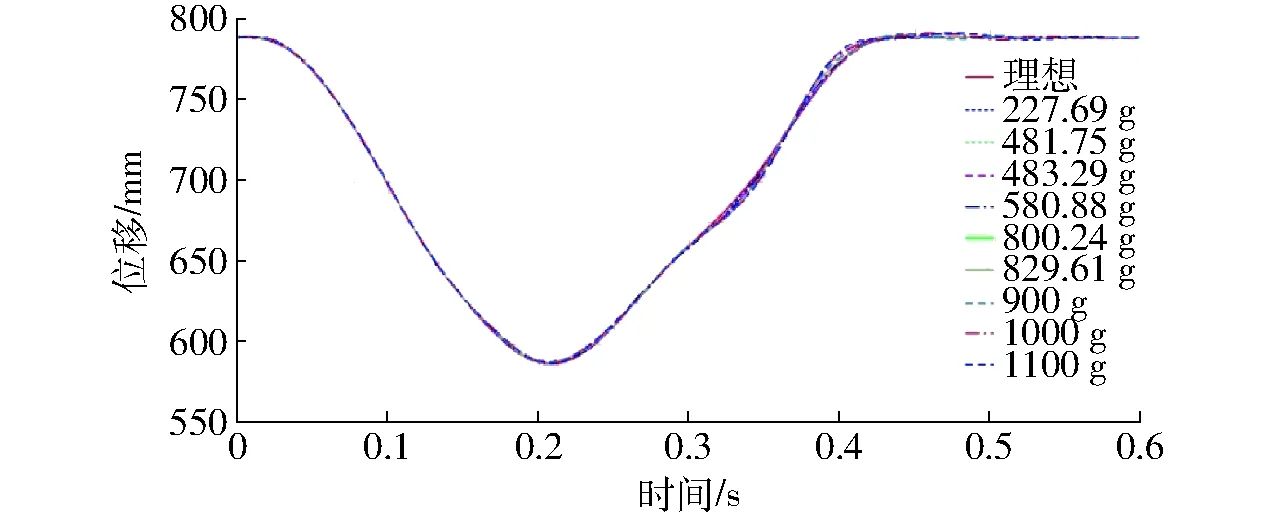
图10 位移随动平台质量变化曲线Fig.10 Changing curves of displacement with moving platform mass
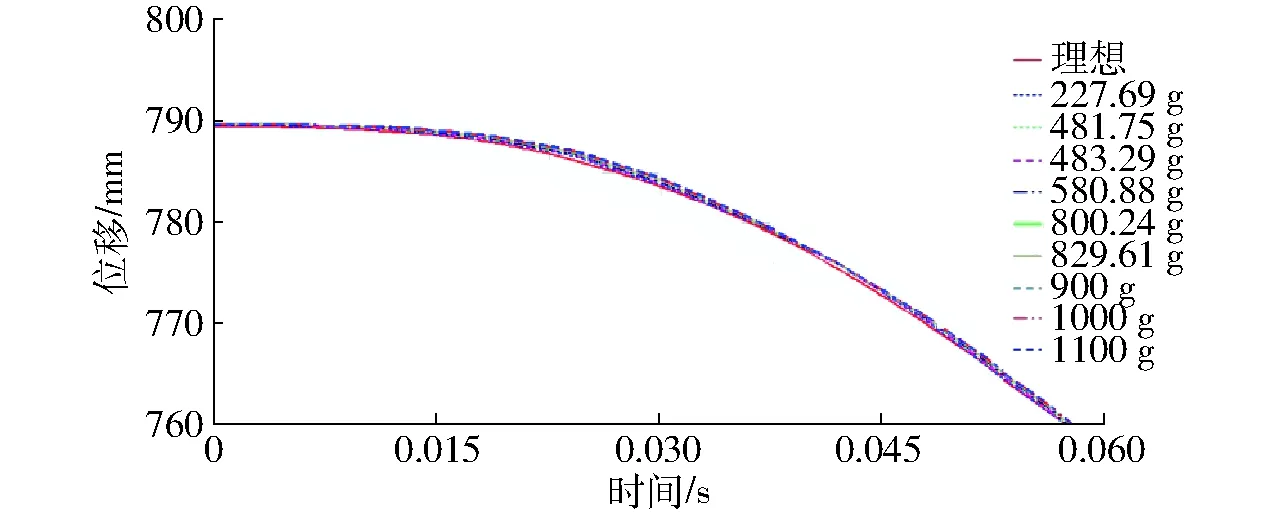
图11 取苗阶段位移随动平台质量变化曲线Fig.11 Changing curves of displacement in picking stage with mass
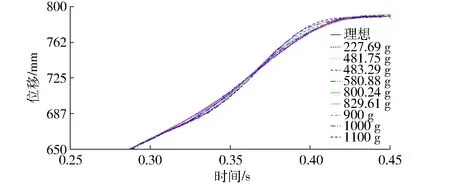
图12 中间阶段位移随动平台质量变化曲线Fig.12 Changing curves of displacement in middle stage with mass
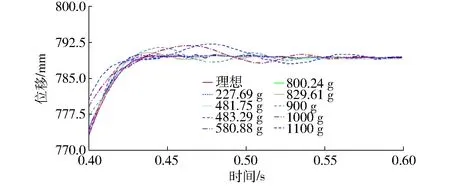
图13 投苗阶段位移随动平台质量变化曲线Fig.13 Changing curves of displacement in delivery stage with mass
从表2中可知,在取苗阶段和投苗阶段,X分量和Z分量(平行于穴盘表面的2个分量)的误差较小,即定位误差较小,在动平台质量为900 g及以下时,其X、Z分量最大误差为1.39 mm,对于最小30 mm的穴孔宽度来说可以接受,在设计末端执行器时应留足余量,防止末端执行器因运动误差与穴盘发生干涉,造成穴盘损坏。
另外,从表2可以发现,各阶段的误差主要来源于Y分量方向(垂直于穴盘表面方向)。末端执行器在垂直穴盘方向的振荡容易压坏苗钵,甚至损坏穴盘和传送带,在设计运动轨迹时,若动平台需要重载,则应当在控制系统中调高落苗点的位置,防止损坏苗钵、穴盘和设备。
实际运行过程中,在并联机构尺寸已经确定的情况下,轨迹曲线的误差还与控制系统密切相关,从上述仿真来看,并联机构从一条较长轨迹上运行,起步阶段精度很高,中间阶段的误差幅度随着动平台质量增加误差逐步增大,停止阶段由于系统惯性,会出现振荡现象,采用优良的控制方法有助于改善末端点轨迹振荡问题。总的来说,在动平台质量不超过900 g时,本机构用于移栽机上具有较高的可行性,其定位精度较高,运行过程平稳,在动平台质量高于900 g时需要降低系统的极值速度和极值加速度以提高稳定性。
3 物理样机制作与试验
基于PLC搭建了开环控制试验系统,样机试验主要用于样机的定位精度及运动性能。
3.1 物理样机
样机的机械执行部分包括并联机器人主体和穴盘、钵盆输送系统(图14)。

图14 并联移栽机器人物理样机Fig.14 Prototype of parallel transplanter1.B支链 2.C支链 3.静平台 4.A支链 5.动平台 6.输送带1 7.输送带2 8.控制柜 9.控制盒 10.机架
输送系统分两路单独由步进电动机控制,由传感器检测有无穴盘、穴盘到位等信息反馈给PLC进行控制进给。移栽机器人由3组伺服电机系统分别控制3条支链的驱动臂,使动平台依照预定指令运动。
本试验基于带有运动控制的PLC,搭建一套开环控制系统。伺服电机的驱动器本身具有一定的闭环反馈控制能力,而这里所说的开环控制是指在PLC中所编写的程序采用单向发送脉冲给伺服电机定位,而不依靠伺服电机驱动器反馈给PLC的编码信号再次进行反馈调整。这用于检测机械执行部件在该套伺服电机系统下的定位能力,检测由固定机械误差(装配误差、加工误差等)引起的定位误差和运动误差。
使用信捷XDM24T4-C型PLC,具有4路脉冲发射端子,可进行四轴联动控制,采用C语言模块可以实现轨迹插补及驱动角度逆解运算,而PLC使用较简单易懂的编程语言使试验得以顺利进行,并且易于操作和调试。
该试验样机的电气控制原理如图15所示。该系统主电路分两路,一路由380 V三相电通过伺服隔离变压器输出200 V电压给2台松下伺服电机供电,另一路由220 V电压经滤波器给华大伺服电机和其他部分供电。控制电路由PLC给伺服电机发射脉冲信号,控制3个伺服电机按预定规则联动经3条支链传递运动给动平台,使其按照预定的轨迹运动。PLC的Y0、Y2、Y4输出接3个伺服电机脉冲端子负极,Y1、Y3、Y5输出接伺服电机方向端子。为搭建试验样机,采用简易控制盒进行简单控制,松闸按钮在电机断电时松开电机抱闸便于机械回零。为简明表达,图15省略了很多线路。该样机实物电气控制柜如图16所示。

图15 电气控制原理图Fig.15 Principle diagram of electrical control
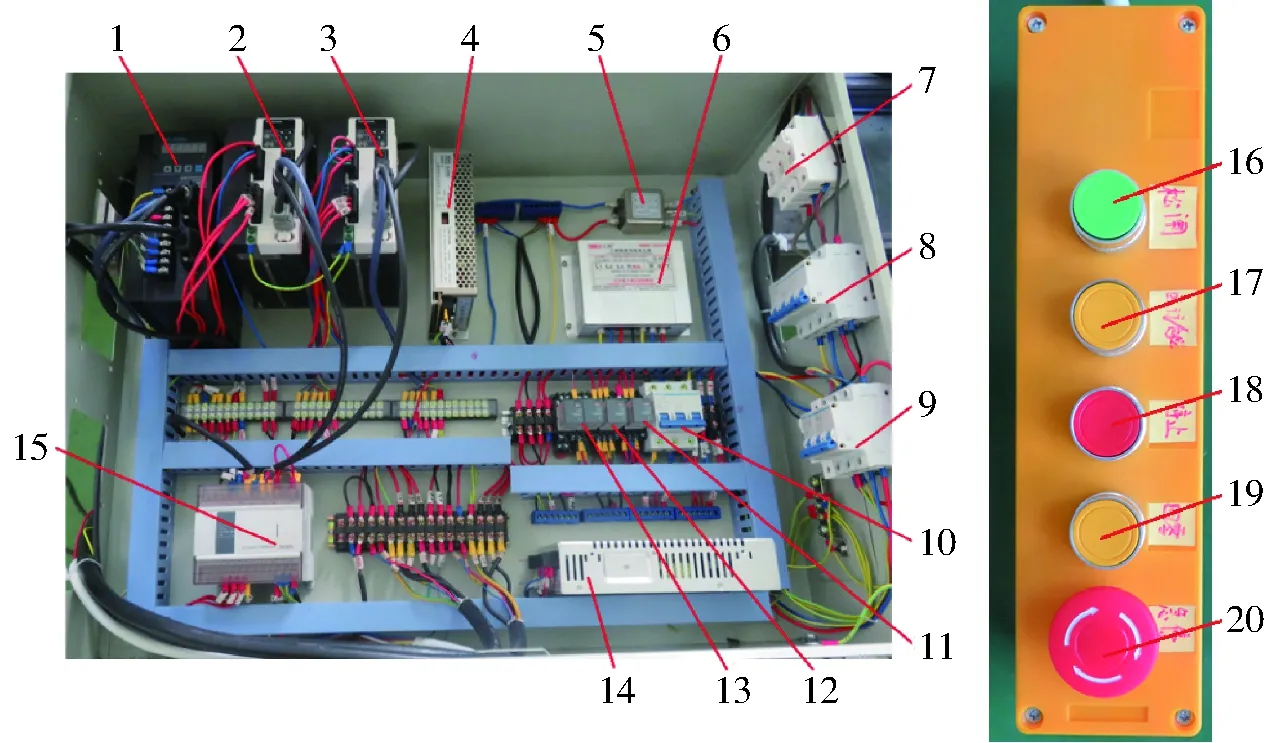
图16 电气控制柜及控制盒Fig.16 Electrical control cabinet and control box1.C支链电机驱动器 2.B支链电机驱动器 3.A支链电机驱动器 4.5 V电源 5.电源滤波器 6.三相伺服变压器 7.熔断器8.A支链电机断路器 9.C支链电机断路器 10.B支链电机断路器 11.松闸继电器 12.24 V电源 13.取苗爪预留继电器 14.伺服报警抱闸继电器 15.可编程控制器 16.松闸按钮 17.定位/运行按钮 18.停止按钮 19.一键回零按钮 20.急停按钮
3.2 定位精度试验
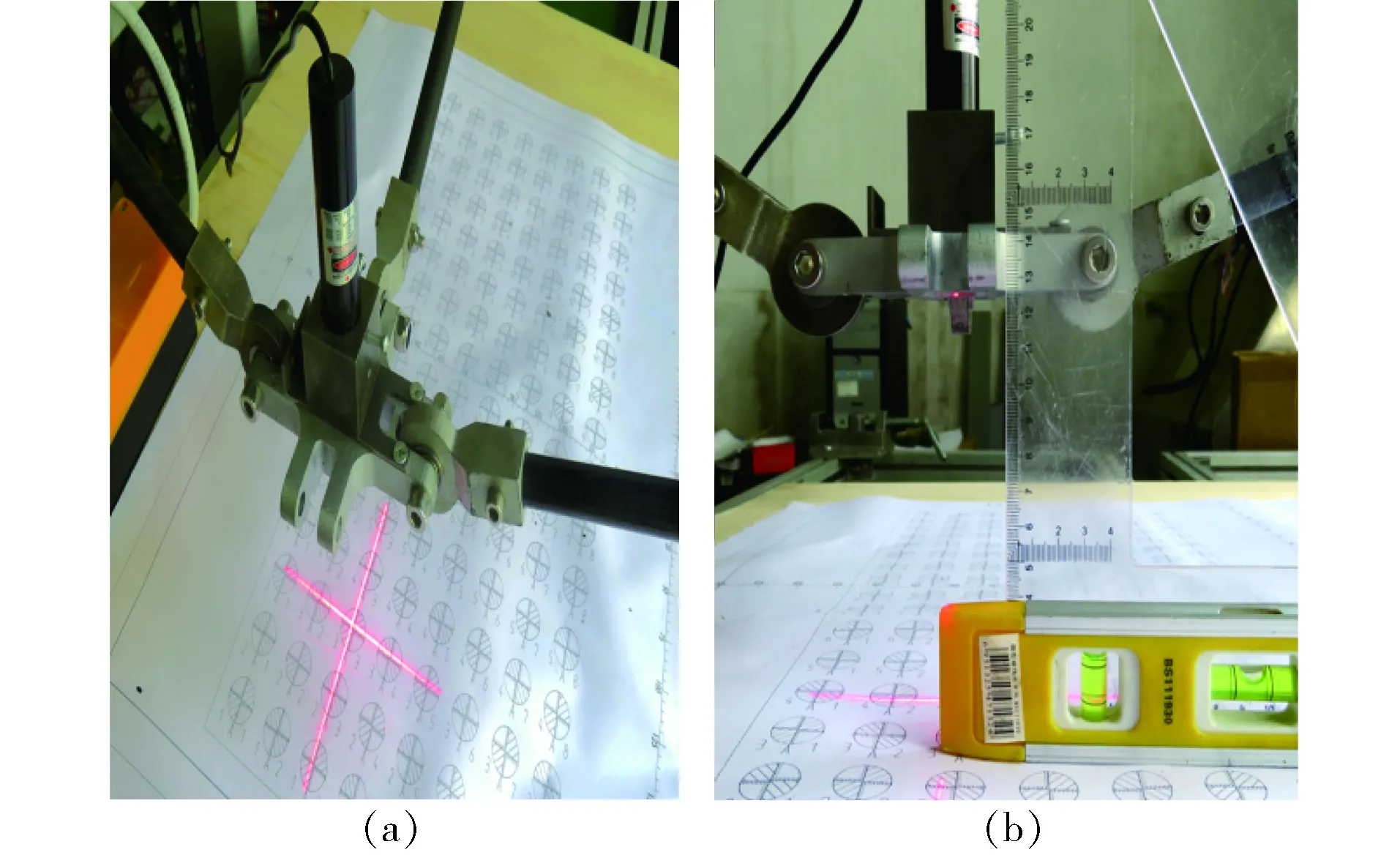
图17 激光器安装图Fig.17 Installation of laser
在动平台上安装十字激光器,在输送平台上附上含有理论中心点的图纸,如图17所示,图17a为X、Y分量上误差测量方法,而图17b为Z分量的测量方法。试验过程每走一个定位点,都记录十字激光器在图纸上的投影点,完成所有点的记录后,统计其误差情况。
将3个方向的误差进行统计整理,并绘制成三维散点图,利用Origin软件用三维表面拟合这些散点图,得到X、Y分量上的误差分布,如图18所示,而Z分量上的误差分布如图19所示。从这些图中可以直观看出误差的实际分布情况,便于分析误差的规律和来源。由图中误差分布情况来看,规律性明显,整体上3个分量都呈现中间精度高,误差向四周逐渐放大,并且都具有方向性,X和Y分量呈瀑布式规律,而Z分量则呈以电子零点为塔尖的金字塔式误差分布。这种误差分布呈现明显规律的现象,首先考虑为系统误差引起,尤其是加工和装配造成的误差。

图18 X、Y分量误差分布图Fig.18 X and Y components error distributions
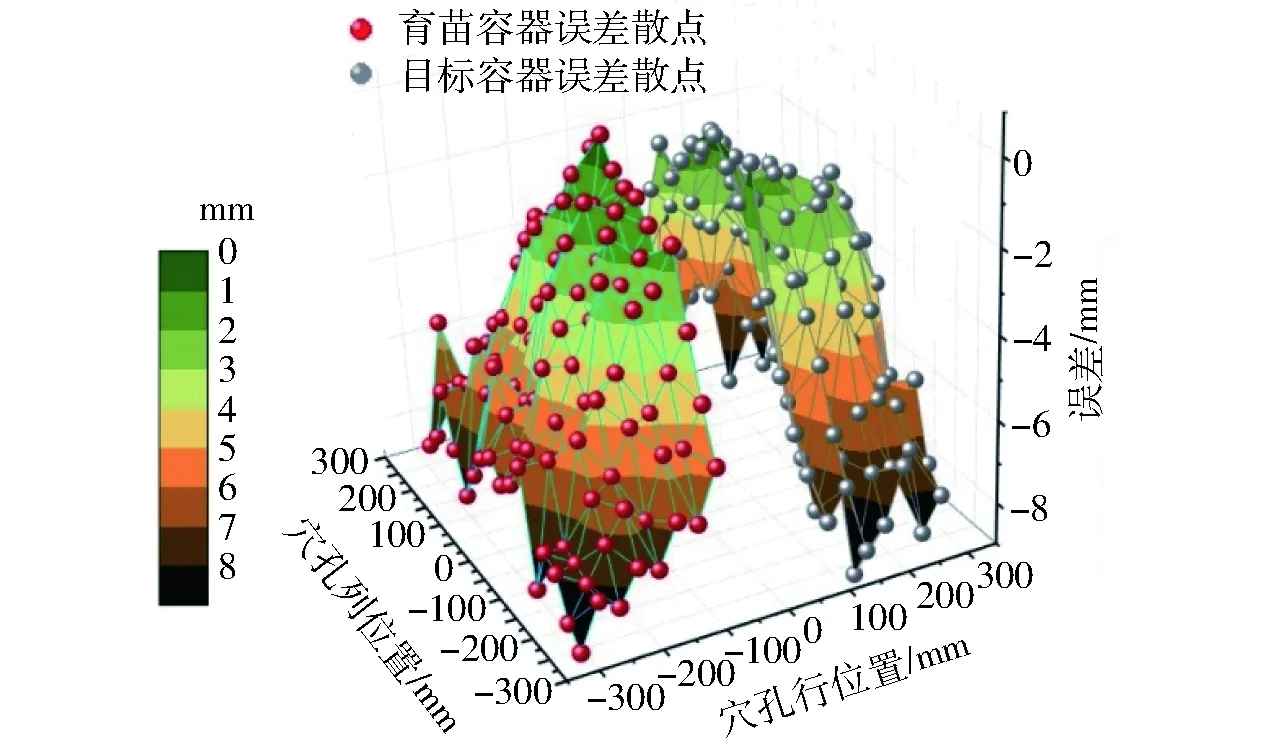
图19 Z分量误差分布图Fig.19 Z component error distribution
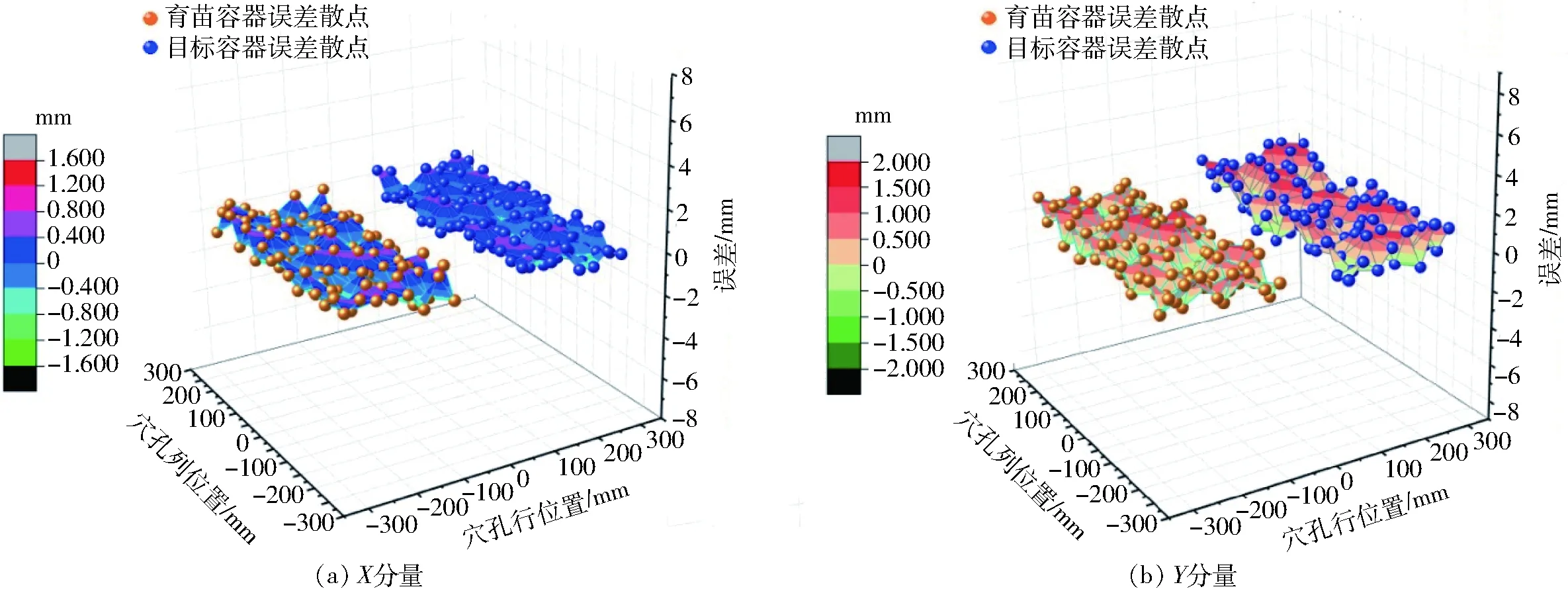
图20 X、Y分量补偿后误差分布Fig.20 X and Y components error distributions after error compensation
统计这些误差的具体数值,将数值转换为驱动电机的反向脉冲数,对PLC中的定位数据进行补偿。再次进行相同的试验并统计补偿后的误差分布,如图20、21所示。
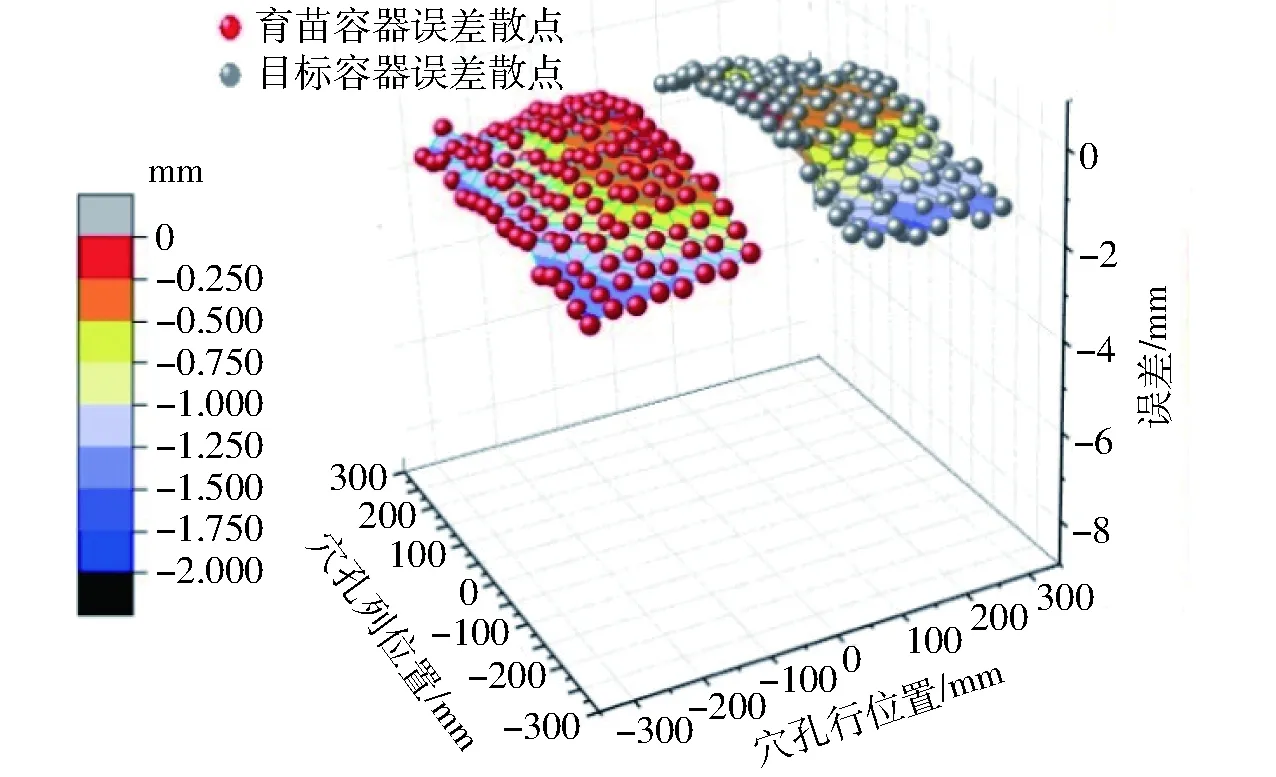
图21 Z分量补偿后误差分布Fig.21 Z component error distribution after error compensation
从图20和图21可以看出,补偿后,总的来看误差已经保持在较低数值水平上,其中X、Y分量的误差没有明显规律,可以认为是随机误差造成的,而Z分量的误差分布仍然具有金字塔型的特征,考虑由于并联机构的关节刚度以及受重力作用的共同影响。统计计算补偿前后平均误差幅值由补偿前的7.611 mm降低到补偿后的1.208 mm。其计算公式为
(2)
式中ζ——平均误差N——数据点数
X——单点误差
综上可以确定,图18和图19中的大数值误差,是由机械部件中装配精度、加工精度、杆件尺寸精度以及零点精度等问题造成的系统误差,该类误差通过补偿后可以基本消除,而图20中的误差主要由随机误差组成,其出现的概率和数值无法确定,主要包括伺服系统误差、控制系统误差等,希望通过完善的闭环控制系统来降低这些误差。另外,在控制系统中,实际上各分量上的误差补偿不应当为具体的数值补偿,而应当通过上述统计拟合出一个补偿方程来对控制系统进行全域补偿,对于图21中Z分量的情况还应当考虑采用过量补偿的方法消除重力等原因的影响。
3.3 运动试验
运动试验是检测并联机构在运动过程中的性能,本试验采用仿真位移误差时所采用的轨迹。插补路径轨迹上的20个点,计算出对应的驱动器转角,将其转换成伺服电机行走的频率和脉冲输入到PLC中。试验装置布置如图22所示。
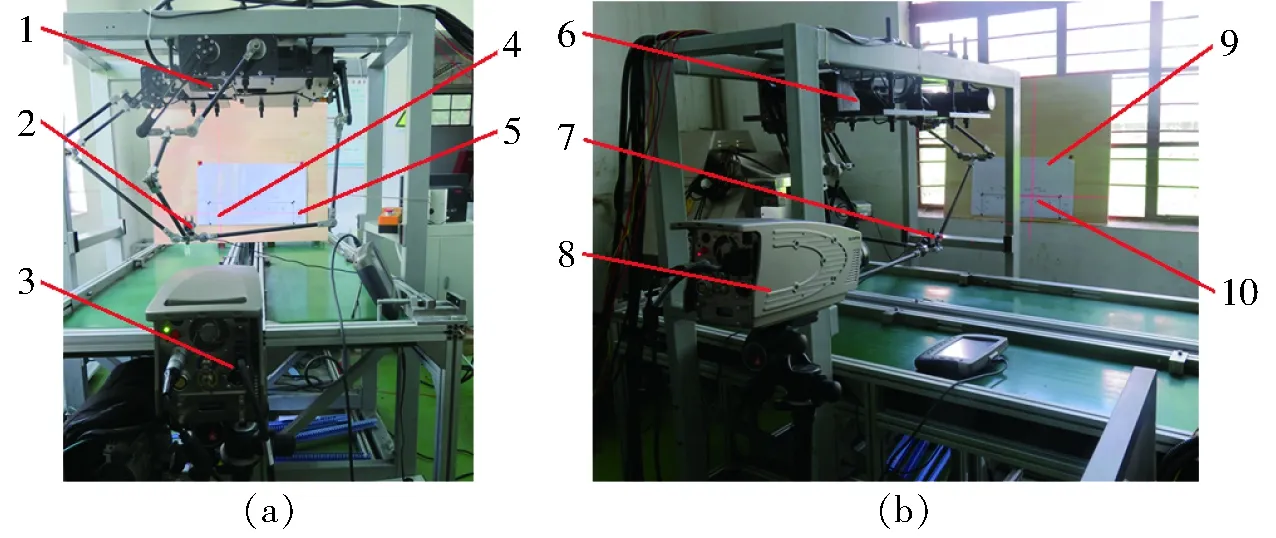
图22 运动性能试验装置布置图Fig.22 Arrangement diagram of performance test device of movement1、6.并联机构 2、7.装有激光器的动平台 3、8.高速摄像机 4、10.十字光斑 5、9.参考图纸
在动平台上绑定十字激光器,将动平台的三维运动转换为2个平面的运动,并利用高速摄像机拍下投影运动过程,从而观察其运动情况。图22a为记录X、Z分量运动时的布置,图22b为记录Y、Z分量运动时的布置。
由于空间运动过程难以用非常直接的方式进行记录,本试验采用此方法粗略估计运行轨迹的情况,根据图23的理论点图纸,在多次运行的过程中记录点的位置(每次都必须从动平台完全静止后开始运动)。
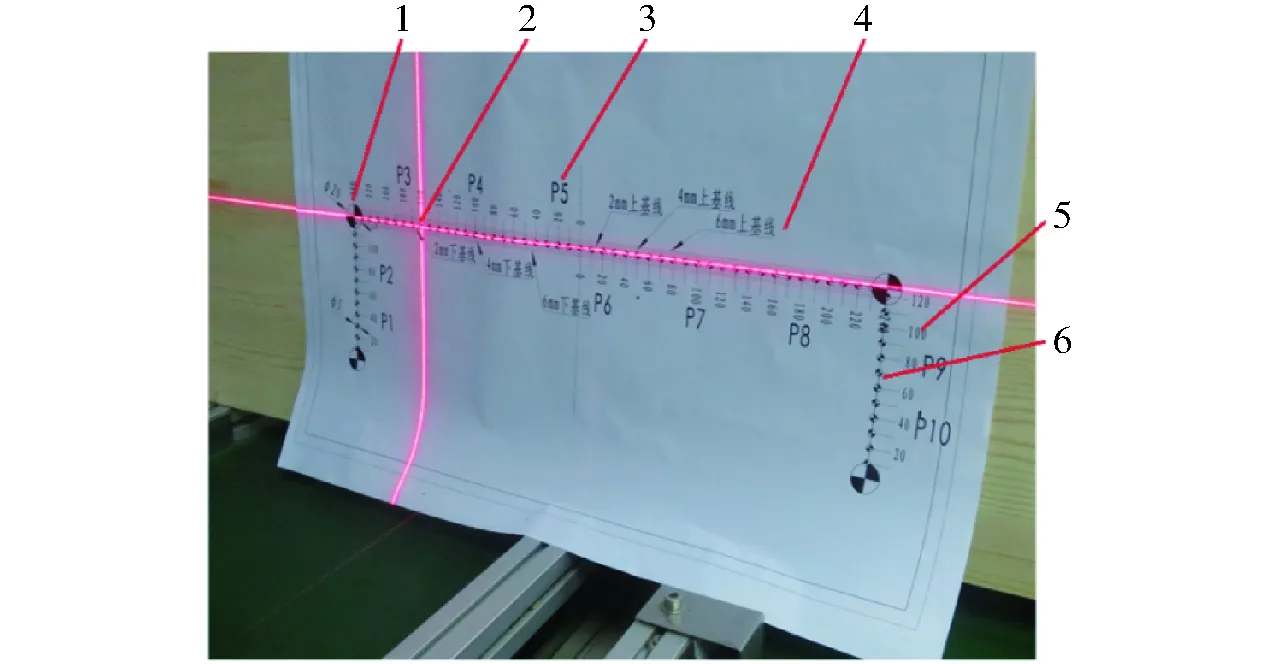
图23 参考图纸Fig.23 Reference drawing1.φ20基准圆 2.激光器光斑 3.标记点 4.误差范围基线 5.刻度尺 6.φ5基准圆
试验在2个运行条件下进行,动平台运动规律设置为PLC自带的正弦加减速运动规律,第1个试验在平均速度2 m/s、加速度峰值20 m/s2下进行,第2个试验在平均速度3 m/s、加速度峰值30 m/s2下进行。记录结果如表3所示。
从表3中数据看出,在2 m/s速度下运行时,可以满足取投苗精度要求,不过与理想数据还有差距。但是在速度达到3 m/s时,误差较大,尤其是在P7、P8标记点时,当动平台从最高速度减速时,由于较大的运动惯性,使误差变得很大。2 m/s的平均移栽速度在温室穴盘苗移栽机器人中保证性价比的同时达到了相对高效移栽、补苗的要求,既保证了移栽的质量也保证了移栽速度。接下来的样机研制,机构的结构刚度还需要进一步加强,尤其是关节处的刚度,应采取更好的结构来提高刚度,以减小机构的运动变形。综合来看,移栽机器人的总体运行情况良好,支链的结构刚度做出一定改善之后,其运动性能可以预测会有较大的提升,整机在移栽方面有较好可行性。
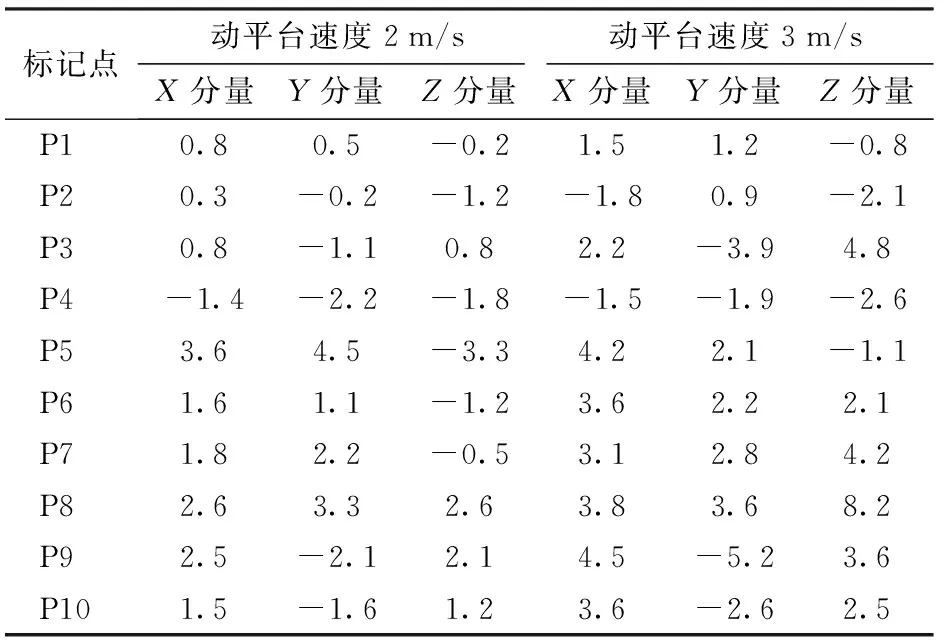
表3 动平台运动误差Tab.3 Displacement error of moving platform mm
4 结论
(1)设计了一种基于并联机构的用于温室穴盘苗移栽的高速并联移栽机器人,将所有连杆柔性化以后进行刚柔耦合动力学仿真,得到了动平台在柔性化模型和刚性模型下运动轨迹的对比,研究了动平台质量对动平台运动误差的影响。
(2)仿真分析发现,在动平台质量为900 g及以下时,该新型构件用于并联移栽机上具有较高的可行性,其定位精度较高,运行过程平稳;在动平台质量高于900 g时,需要降低系统的极值速度和极值加速度以提高稳定性。
(3)并联移栽机物理样机试验发现,样机定位误差主要成分为系统误差,对系统进行误差补偿后,其平均误差从7.611 mm降低到1.208 mm,符合移栽机器人定位要求。
(4)并联移栽机运动试验发现,样机在2 m/s平均速度下运行时,可以满足取投苗精度要求,并且能够达到温室穴盘苗高效移栽、补苗的需求。当平均速度达到3 m/s时,误差较大,尤其是后段由于较大的运动惯性,误差很大。
1于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J/OL].农业机械学报,2014,45(8):44-53.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140808&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.08.008.
YU Xiaoxu, ZHAO Yun, CHEN Baocheng, et al. Current situation and prospect of trans planter[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(8):44-53.(in Chinese)
2金鑫,李树君,杨学军,等.蔬菜穴盘苗取苗机构分析与参数优化[J/OL].农业机械学报,2013,44(增刊1):1-6,13.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2013s101&flag=1.DOI:10.6041/j.issn.1000-1298.2013.S1.001.
JIN Xin,LI Shujun,YANG Xuejun, et al. Analysis and parameter optimization for vegetable plug seedling pick-up mechanism[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(Supp.1):1-6,13. (in Chinese)
3RYU K H, KIM G, HAN J S. Development of a robotic transplanter for bedding plants [J]. Journal of Agricultural Engineering Research, 2001, 78(2): 141-146.
4CHOI W C, KIM D C, RYU H L, et al.Development of a seedling pick-up device for vegetable transplanters [J]. Transactions of the ASAE, 2002, 45(1): 13-19.
5童俊华, 蒋焕煜, 刘岩,等. 设施农业内自动移钵机器人的应用研究进展[C]∥2012中国农业机械学会国际学术年会论文集,2012:10-16.
TONG Junhua, JIANG Huanyu, LIU Yan, et al.Advance on application of seedling transplantion robot for bedding plants in facility agricalture[C]∥2012 International Academic Annual Meeting of China Agricultural Machinery Society,2012:10-16.(in Chinese)
6崔巍.旱地钵体苗自动移栽机理论与试验研究[D].北京:中国农业大学,2015.
CUI Wei. Research on dry land automatic trans-planter for plug seedling[D].Beijing:China Agricultural University,2015.(in Chinese)
7蒋焕煜,施经挥,任烨,等.机器视觉在幼苗自动移钵作业中的应用[J].农业工程学报, 2009,25(5):127-131.
JIANG Huanyu, SHI Jinghui, REN Ye, et al.Application of machine vision on automatic seedling transplanting[J].Transactions of the CSAE,2009,25(5):127-131. (in Chinese)
8QI Chunhui, HU Jianping, MA Jun, et al. Solving motion law by numerical simulation on bowl seeding transplanting robot[C]∥IFIP Advances in Information and Communication Technology 370, Proceedings of 5th International Conference on Computer and Computing Technology in Agriculture,2012: 103-111.
9廖庆喜,刘明峰,张照,等.油菜钵苗移栽机双五杆栽植机构多目标优化设计[J/OL].农业机械学报,2015,46(11):49-56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151108&flag=1.DOI:10.6041/j.issn.1000-1298.2015.11.008.
LIAO Qingxi, LIU Mingfeng, ZHANG Zhao, et al.Multi-objective optimization design of double five-bar transplanting mechanism for rape pot seedling[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(11):49-56.(in Chinese)
10CHEN Genliang, WANG Hao, LIN Zhongqin. Generalized kinematic mapping of constrained plane motions and its application to the accuracy analysis of general planar parallel robots[J]. Mechanism and Machine Theory, 2012, 50: 29-47.
11KORAYEM M H, YOUSEFZADEH M, MANTEGHI S. Dynamics and input-output feedback linearization control of a wheeled mobile cable-driven parallel robot[J]. Multibody System Dynamics, 2017,40(1):55-73.
12LI Shujun, YANG Xuejun, YAN Hua,et al.Kinematic analysis and performance experiment of cam-swing link planting mechanism[J]. Transactions of the CSAE,2016, 32(6):34-41.
13杨继东,万彪刚,高俊东,等.Tripod并联机器人运动学分析与样机实验[J/OL].农业机械学报,2016,47(10):390-397.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20161051&flag=1.DOI:10.6041/j.issn.1000-1298.2016.10.051.
YANG Jidong,WAN Biaogang,GAO Jundong, et al.Kinematic analysis and experiment of Tripod parallel robot[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,47(10): 390-397.(in Chinese)
14刘继展,刘炜,毛罕平,等.面向立柱栽培的移栽机器人设计与协调运动仿真[J/OL].农业机械学报, 2014, 45(7):48-53.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140708&flag=1.DOI:10.6041/j.issn.1000-1298.2014.07.008.
LIU Jizhan,LIU Wei,MAO Hanping,et al.Design and coordinated motion simulation of transplanting robot for column cultivation[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(7):48-53.(in Chinese)
15PORTMAN V T, CHAPSKY V S, SHNEOR Y. Workspace of parallel kinematics machines with minimum stiffness limits: Collinear stiffness value based approach[J]. Mechanism and Machine Theory, 2012, 49: 67-86.
16LI Tiemin, JIA Shi,WU Jun.Dynamic model of a 3-DOF redundantly actuated parallel manipulator[J].International Journal of Advanced Robotic Systems,2016,13(5):1-12.
17胡建平,靳合琦,常燕超,等.基于Delta并联机构钵苗移栽机器人尺度综合与轨迹规划[J/OL].农业机械学报,2017,48(5):28-35.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170503&flag=1.DOI:10.6041/j.issn.1000-1298.2017.05.003.
HU Jianping,JIN Heqi, CHANG Yanchao, et al.Dimensional synthesis and trajectory planning of plug seedling transplanting robot based on Delta parallel mechanism[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(5):28-35. (in Chinese)
18胡建平,张晨迪,王留柱,等.全自动温室钵苗移栽机设计与试验[J/OL].农业机械学报,2016,47(增刊):149-154.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2016s023&flag=1.DOI:10.6041/j.issn.1000-1298.2016.S0.023.
HU Jianping,ZHANG Chendi,WANG Liuzhu,et al. Design and experiment on automatic greenhouse seedling transplanting machine[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(Supp.):149-154.(in Chinese)
19XIE Fugui,LIU Xinjun,YOU Zheng, et al.Type synthesis of 2T1R-type parallel kinematic mechanisms and the application in manufacturing [J]. Robotics and Computer-Integrated Manufacturing, 2014, 30(1):1-10.
20PARTHAJIT M, BHASKAR D, MALLIK A K. Dynamic stability index and vibration analysis of a flexible Stewart platform[J]. Journal of Sound and Vibration, 2007, 307: 495-512.
21HAN Lühua,MAO Hanping,HU Jianping,et al.Design and test of combined pick-up device for automatic and precise transplanting of vegetable plug seedlings[J].Transactions of the CSAE, 2015,31(1):17-23.
