基于傅立叶变换的灰度成像扩展目标跟踪帧间图像配准方法∗
2018-03-31秦雨萍
秦雨萍 张 萍 张 双
1 引言
目标的运动图像序列为复杂背景下的目标检测提供了比目标静止时更多的有用信息,使得可以利用图像序列检测出单帧图像中很难检测出的目标[1]。由运动目标所形成的图像序列可分为两种情况:一种是静止背景[2],一种是变化背景[3]。前一种情况通常发生在摄像机相对静止的状态(如监视某一路口车流量的固定摄像机[4]),后一种情况通常发生在摄像机也在相对运动状态(如装在舰船[5]或飞机上的监视系统[6])。从处理方法看,一般是采用突出目标或消除背景的思想。对小弱目标,其信噪比低,目标常常会淹没于背景噪声中,这时的目标检测通常采用突出目标的方法,如李正周[7]运用多帧形态膨胀累加取得较好的检测效果。对于我们研究的扩展目标来说,由于目标离成像传感器较近,获得的图像质量较小弱目标好,因此我们的关键是从复杂背景中分离出扩展目标[8]。在运动背景下扩展目标的检测中。目标运动的同时,摄像机也由于运载平台的姿态或位置改变而发生变化,因此运动目标在图像上造成的变化与背景自身的变化会混淆在一起,使得运动目标的检测变得复杂起来。为了能沿用静态背景下的检测思想,可考虑先将背景稳住,即将连续几帧图像的相同背景稳定在同一幅图像的相同位置上,从而使运动目标“暴露”出来。配准是实现背景稳定的重要方法。针对上述问题,本文提出了基于傅立叶变换的灰度成像扩展目标跟踪帧间图像配准方法,并根据互能量方法计算出能量的偏倚量。实验表明,该方法能够很好地实现平移变化中的图像配准。
2 算法描述
图像配准[9~13]技术可有效地剔除缓变背景的影响。在本文研究中,主要考虑较普遍的变化方式:平移变化。当两帧图像的背景只有平移变化时,计算出它们的平移量即可实现配准。由于平移变化对图像的相位信息影响较大,因此本文将采用相位相关的方法来实现图像的配准。

对M×M的图像 fi( )k,l求其N×N 的傅立叶变换,可以得到:

其中N≥M ;k=0,1,…,M ;m=-N/2,…,N/2-1;n=-N/2,…,N/2-1。
在研究两帧图像的互能量谱关系中,将两帧图像进行离散相位相关的傅立叶变换,从而可以得到互能量谱关系函数[14~17]:

其中F2*为F2的复共轭。
将式(1)代入式(3)可以得到图像 f2( )x,y 与图像的互能量谱关系函数:

根据平移理论得知,互能量谱的相位等于图像间的相位差。将式(4)进行傅立叶反变换,从而得到图像的偏移量冲击函数为

该冲击函数在偏移位置处存在明显的尖锐峰值,其它位置的值接近于零,所以据此就能找到两图像间的偏移量。
3 试验结果
为了验证算法的合理性,我们选用了大小为640×480的图像序列,利用式(4)定义的互能量谱关系函数以及式(5)定义的图像的偏移量冲击函数进行灰度成像扩展目标配准试验。试验中(P4 2.5,1G内存)每帧图像处理平均时间分别为11.2ms和12.6ms,均小于20ms,故耗损资源极少,满足实时性要求。

图1 序列图像
图1 (a),(b)为序列图像中相邻两帧图像,从图中可以看出,图中参考物树,运动目标飞机均发生了一定的平移;图2(a),(b)分别是其傅立叶变换的互能量谱,高脉冲为图中检测目标飞机的相关脉冲量。图3为两帧图像的偏移量冲击函数,很明显可以看到一个冲击脉冲,通过检测其位置,得出其位置为(14,1),即图1(b)参照图1(a)水平向右移动14个像素,垂直向上移动1个像素。为此在图像配准中,只需要将图1(b)平移(-14,-1)即可实现两帧图像的配准。
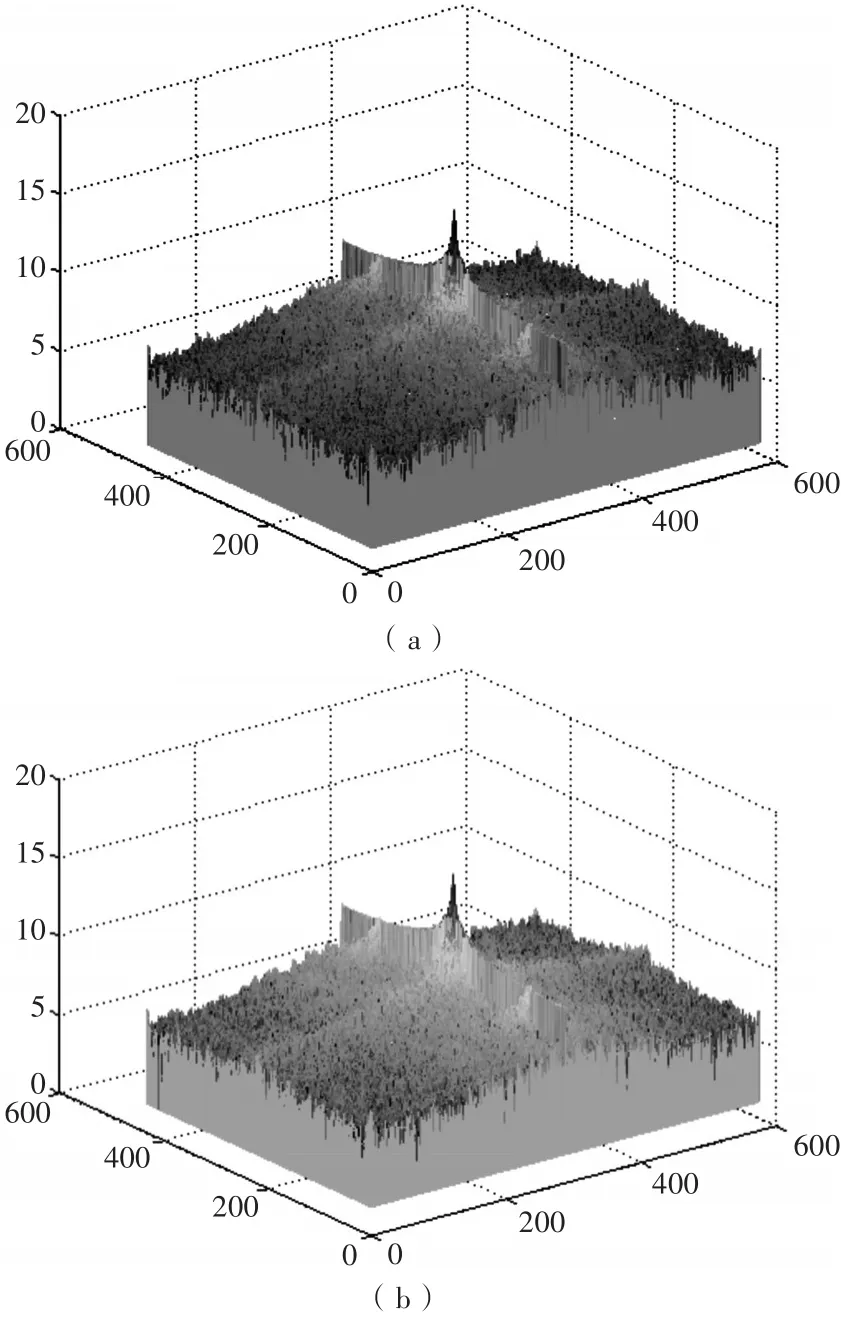
图2 图像傅立叶变换的互能量谱

图3 两帧图像的图像的偏移量冲击函数
4 结语
本文研究了一种灰度成像扩展目标配准算法。针对运动背景下扩展目标的检测中,运动目标在图像上造成的变化与背景自身的变化会造成混淆,使得运动目标的检测变得更加复杂这一问题。提出了基于傅立叶变换的灰度成像扩展目标跟踪帧间图像配准方法。以帧间图像的互能量谱关系函数为系统的目标函数,以偏移量冲击函数为系统的偏移量配准函数。试验结果表明,采用该算法,得出目标图与偏移图水平向右移动14个像素,垂直向上移动1个像素。利用该参数将偏移图平移(-14,-1)即可实现两帧图像的配准。从而可以有效提高对灰度成像扩展目标跟踪检测的稳定性。本文算法具有计算量小的特点,可满足扩展目标跟踪中,图像配准的实时性要求。
[1]Stockman G.,Kopstein S.,Benett S.,Matching images to models for registration and object detection via clustering[J].IEEE Transactions on Pattern Analysis and Machine Intelligence.1982,4(3):229-241.
[2]Gaurav Sharma;Frédéric Jurie;Cordelia Schmid,Ex⁃panded Parts Model for Semantic Description of Humans in Still Images[J].IEEE Transactions on Pattern Analysis and Machine Intelligence.2017,39(1):87-101.
[3]R.P.Wurtz,Object recognition robust under translations,deformations, and changes in background[J].IEEE Transactions on Pattern Analysis and Machine Intelli⁃gence.1997,19(7):769-775.
[4]Xinwu Liang;Hesheng Wang;Weidong Chen;Dejun Guo;Tao Liu,Adaptive Image-Based Trajectory Track⁃ing Control of Wheeled Mobile Robots With an Uncalibrat⁃ed Fixed Camera[J].IEEE Transactions on Control Sys⁃tems Technology,2015,23(6):2266-2282.
[5]Hanjiang Luo;Kaishun Wu;Zhongwen Guo;Lin Gu;Li⁃onel M.Ni,Ship Detection with Wireless Sensor Networks[J].IEEE Transactions on Parallel and Distributed Sys⁃tems,2012,23(7):1336-1343.
[6]R.M.O'Donnell;C.E.Muehe,Automated Tracking for Aircraft Surveillance Radar Systems[J].IEEE Transac⁃tions on Aerospace and Electronic Systems,1979,AES-15(4):508-517.
[7]李正周,王会改,刘梅,丁浩,金钢,基于形态成分稀疏表示的红外小弱目标检测[J],弹箭与制导学报,2013,33(4):29-32,36.
[8]T.KAILATH.The Divergence ,Bhattacharyya Distance Measures in Signal Selection[J].IEEE Trans.Comm.Technology,1999,15(2):253-259.
[9]Barbara Zitová,Jan Flusser,Image registration methods:a survey[J].Image and Vision Computing,2003,21(11):977-1000.
[10] Kumaradevan Punithakumar; Pierre Boulanger; Mi⁃chelle Noga,A GPU-Accelerated Deformable Image Registration Algorithm With Applications to Right Ven⁃tricular Segmentation [J].IEEE Access,2017,5:20374-20382.
[11]Iman Aganj;Bruce Fischl,Multimodal Image Registra⁃tion Through Simultaneous Segmentation[J].IEEE Sig⁃nal Processing Letters,2017,24(11):1661-1665.
[12]Vijay Rengarajan;Ambasamudram Narayanan Rajagopa⁃lan;Rangarajan Aravind;Guna Seetharaman,Image Registration and Change Detection under Rolling Shutter Motion Blur[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2017,39(10):1959-1972.
[13]Wei Sun;Wiro J.Niessen;Stefan Klein,Randomly Per⁃turbed B-Splines for Nonrigid Image Registration[J].IEEE Transactions on Pattern Analysis and Machine In⁃telligence,2017,39(7):1401-1413.
[14]Abidi A.and Gonzalez R.C.,Data Fusion in Robotics and Machine Intelligence[M].New York:Academic Press.1992.
[15]Dasarathy B.V.,Fusion strategies for enhancing decision reliability in multi-sensor environments[J].Optical En⁃gineering.1996,35(3).603-616.
[16]Li H.,Manjunath B.S.,Mitra S.K.,Multi-sensor image fusion using the wavelet transform[C]//IEEEInternation⁃al Conference on Image Processing.19941(11):51-55.
[17]Koren I.,Laine A.,Taylor F.,Image fusion using steer⁃able dyadic wavelet transform[C]//Proceedings of the In⁃ternational Conference on Image Processing.Washing⁃ton,DC,USA,1995:232-235.
