新型行车多轴控制系统设计与实现
2018-03-30,,,
, ,,
(1.华中科技大学船舶与海洋工程学院,湖北 武汉 430074;2.武汉第二船舶设计研究所,湖北 武汉 430064;3.武汉空军预警学院,湖北 武汉 430019)
0 引言
多轴构成的运动控制系统主要由机械执行机构和运动控制器2部分组成。运动控制技术伴随着数控技术、机器人技术的进步而发展[1]。
目前,国内外学者开发出的多轴运动控制系统,为使执行机构可以到达平面内的任意一点,采用的方法往往是每个运动方向由1台实际伺服电机驱动,多台伺服电机联动来完成运动控制[2-3]。然而,当某一个运动方向上所受的负载力矩较大时,该方向上若还是仅采用单台伺服电机来驱动,很显然运动的平稳性得不到保证。为此,设计了新型行车运动控制系统。
1 新型行车系统构成
新型行车运动控制系统机械结构的主视图和俯视图分别如图1和图2所示。
其中,X轴方向由2台伺服电机A和B共同驱动,2台伺服电机A和B分别安装在在行车的两端。2台伺服电机共同驱动,既可以保证提供更大的驱动力矩,又由于2台电机安装位置的对称性使X轴方向的运动更加平稳。而X轴方向平稳运动的关键在于,伺服电机A和伺服电机B在运动过程中的严格同步。为此,将着重介绍基于虚拟轴技术的两轴同步运动的实现方法。
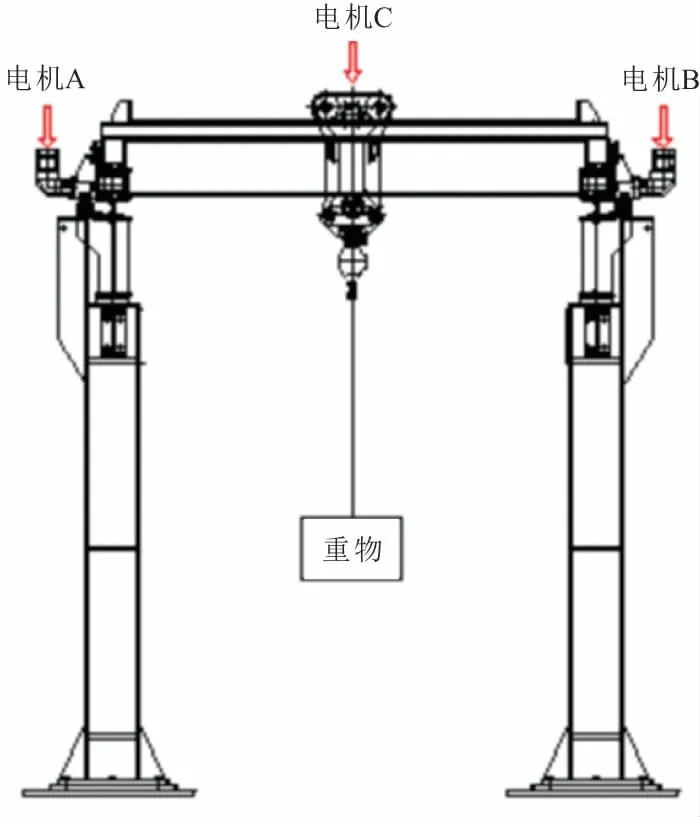
图1 新型行车系统主视图
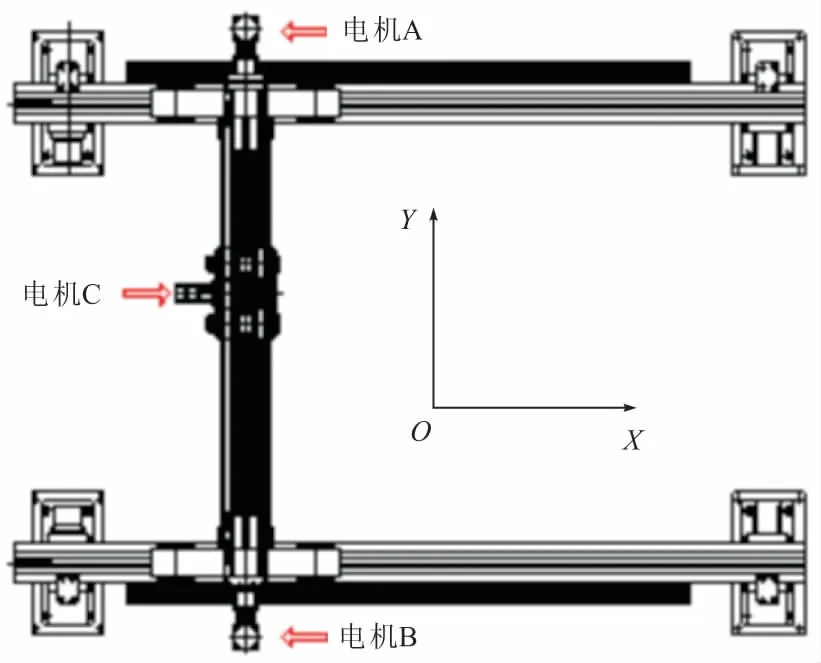
图2 新型行车系统俯视图
Y轴方向由伺服电机C带动。3台伺服电机A,B,C一起联动,则可以带动重物在XY平面内完成运动控制。
2 控制系统设计
2.1 硬件组成
新型行车控制系统归根结底是由3台伺服电机带动机械执行机构来完成运动控制功能,当机械系统设计加工安装完毕以后,整个行车系统能否完成指定的功能则完全依赖于伺服电机的性能[4]。
新型行车系统以安川运动控制器MP2310为核心,通过3台安川伺服驱动器完成对3台伺服电机的控制。运动控制器与伺服驱动器,以及伺服驱动器与伺服驱动器之间,通过安川电机公司的MECHATROLINK-II总线进行连接。3台伺服驱动器的轴编号依次设定为1~3,最后1台伺服驱动器要接终端电阻,用来指示此伺服驱动器为运动控制系统最后1台伺服驱动器[5]。3台伺服电机的限位开关信号与安川运动控制器MP2310的I/O口相连,用于在机械机构运动到行程终点时,采用程序使伺服电机紧急停止。
新型行车系统使用工业控制计算机作为上位机进行人机交互,采用以太网与运动控制器MP2310进行连接。用于给运动控制器MP2310发送控制与操作指令,以及接收MP2310反馈回来的信息并进行实时的显示。
整个控制系统的硬件组成,如图3所示。

图3 控制系统硬件组成
2.2 基于虚拟轴的同步控制实现方法
常见的多轴同步控制[6]方法主要有2种:对等控制和主从控制[7]。对等控制,是最简单直观的一种同步策略,所有伺服驱动器的输入来自于同一个信号,即主令参考信号。每个运动轴在该信号的控制下并行工作,互不相干。若其中一个轴受到扰动,由此产生的同步误差只能通过该轴自身的调节来减小,其他轴并不会对其做出响应。并且,该种同步策略,只是要求各轴到达同一目标位置,在每一步运行过程中可能并不同步。由此可见,这种同步方式对于运动轴自身的跟随性能有较高要求,且仅适用于受干扰较少的场合。主从式同步方案将运动轴划分成主轴和从轴,其中从轴的参考输入信号来自于主轴输出。当从运动轴受到扰动时,主轴不会对其有任何响应,导致同步误差得不到及时修正,且当2个电机负载不同时,同步的效果会很差。
虚拟轴技术,是为了实现精确同步运动而逐渐发展起来的一种新型同步运动控制技术[8]。安川运动控制器MP2310自带虚拟运动模块SVR和实际运动模块SVB,其中,实际运动模块SVB最多可以带16台实际伺服电机。由虚拟运动模块和实际运动模块组成的系统如图4所示。
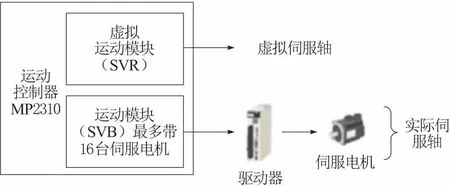
图4 虚拟运动模块和实际运动模块组成的系统
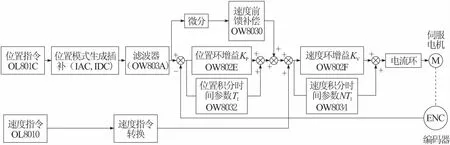
图6 位置控制系统结构
运用虚拟轴技术实现同步控制的思想是:通过MP2310自带的虚拟运动模块SVR在X轴方向构建1根虚拟轴V,虚拟轴V并不与实际的电机和驱动器相连接,因此不存在实际的误差,可以精确地完成所有的运动命令。在梯形程序中,把虚拟轴V反馈回来的位置信号IL8816,赋值给伺服电机A的位置控制指令信号OL801C和伺服电机B的位置控制指令信号OL809C。因为虚拟轴的运动不存在任何误差,而在虚拟轴运动过程中,实伺服电机A和伺服电机B的每一步运动都严格跟随虚拟轴,因此在程序的每一个扫描周期或者整个运动过程中,伺服电机A和伺服电机B都将始终保持着同步。
2.3 多轴联动控制策略
基于虚拟轴的同步控制只完成了X轴方向的运动控制,然而,要实现XY平面内的任意曲线运动,还必须完成X轴与Y轴之间的联动,也即伺服电机A和B要与伺服电机C联动。
安川运动控制器MP2310完成多轴曲线运动,采用的是在运动程序中通过直线插补、圆弧插补等位置控制指令来实现[9]。由于新型行车系统X轴方向由2台实际伺服电机带动,所以很显然不能直接采用X轴方向实际伺服电机与Y轴实际伺服电机进行直接插补,因为这样X方向2台实际伺服电机将不能够保证同步。考虑到X轴方向2台实际伺服电机跟随X方向的虚拟轴一起运动,所以,可以采用X方向的虚拟轴与Y方向的实际伺服电机C共同完成插补等位置控制,同时X方向2台实际伺服电机跟随虚拟轴V,这样就完成了X轴方向的2台伺服电机A和B与Y方向的伺服电机C之间的联动。
X轴方向实际伺服电机A和B跟随虚拟轴V运动,虚拟轴V和Y方向实际伺服电机C共同完成位置控制,整个多轴联动控制策略如图5所示。
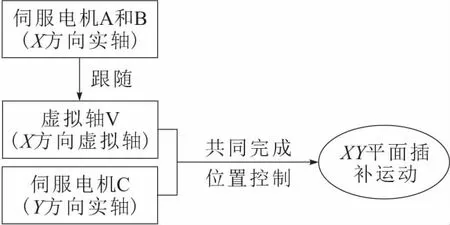
图5 多轴联动控制策略
X方向虚拟轴V和Y方向实际伺服电机C插补运动,共同组成位置控制系统,如图6所示。
由运动控制器MP2310给定虚拟轴V和实际伺服电机C平面定位位置插补信号,对于伺服驱动器而言,该信号既可以是位置环的指令信号,也可以经过微分以后变成速度环的指令信号;OL8010是伺服驱动器速度环指令信号之一;虚拟轴V由于不与实际电机连接,不存在位置误差,实际轴C的位移信号由伺服电机的编码器反馈至位置环的输入,构成闭环系统。
位置环和速度环均采用PI进行调节,位置环PI控制参数KP,TI和速度环PI控制参数KV,NTI,均可在运动控制器MP2310进行设定。经过位置环和速度环的调节以后,信号经过电流环的处理送往伺服电机,对伺服电机进行控制。
2.4 软件实现
系统软件主要由计算机人机交互软件和运动控制器软件组成,控制系统软件结构如图7所示。
计算机人机交互软件用VC++编制,为上位机软件,是人机交互中心和通讯中心。其功能是:
a.控制模块实现对控制信号进行选择、设定,并通过以太网将控制信息传送给运动控制器MP2310。
b.通过以太网,接收运动控制器发来的整个装置相关的各项参数信息。
c.数据显示模块将接收到的电机速度、位置和行程开关等的实时信息,以数据更新、指示灯和动态曲线等方法显示。
运动控制器软件用安川的MPE720软件来编写,为下位机软件。其功能是:
a.通过以太网接收来自上位机软件的控制信号。
b.对控制信号进行判断,以执行不同的运动程序。
c.通过MECHATROLINK-Ⅱ总线,实现运动控制器与伺服驱动器的信息交换,从而实现对伺服电机的运动控制、参数监测等,最终实现整个装置按照指定的流程运行。
3 实验及结果分析
以新型行车系统作为实验平台,所带动重物质量为100 kg,通过原点复归操作设定X轴方向伺服电机A和伺服电机B的原点为最西侧,Y轴方向伺服电机C的原点为最南侧。按照多轴联动控制策略编写3台伺服电机联动的运动程序,设计3台伺服电机联动带动重物,在XY平面内按照Y=2X的直线先从(0,0)运动到(1 000,2 000),接着再由(1 000,2 000)运动回(0,0),并对实验结果进行了验证。
实验中不断记录3台伺服电机反馈回来的位置信息,所得实验结果如表1所示。
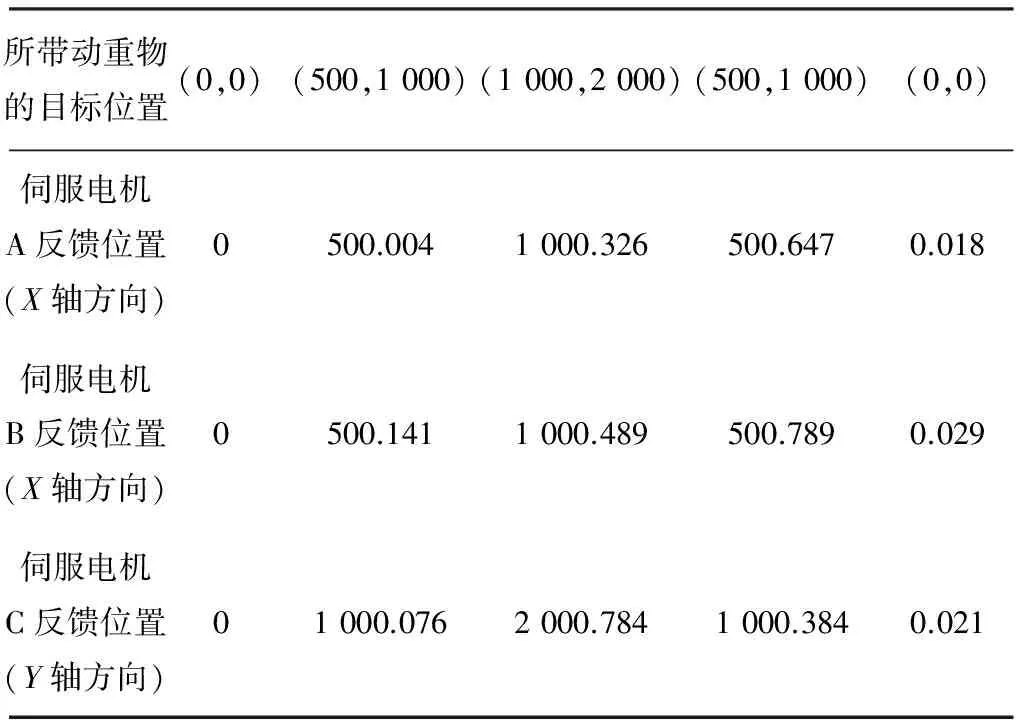
表1 实验结果数据 mm
由表1可知,X轴方向的实际伺服电机A和实际伺服电机B反馈回来的位移差值非常小,说明了基于虚拟轴的2台实际伺服电机A和B保持了很好的同步关系;并且,伺服电机C反馈回来的Y轴方向的位移与伺服电机A和B反馈回来的X轴方向的位移也基本满足Y=2X的关系,与程序中所设计的带动重物按照Y=2X直线运动相符。充分说明了多轴联动控制策略的可行性。
4 结束语
以“计算机+运动控制器MP2310”为核心,设计了一个完善的多轴联动控制系统。基于构建虚拟轴的思想,实现了两轴高精度的位置同步控制,并且在两轴同步控制中,采用的是2个实轴对于虚拟轴的位置跟随,所以很容易进行同步轴系数量的扩展,即很容易扩展到多轴同步控制。给出了XY平面三轴联动系统的软件设计框图,并进行了实验,实验结果表明,系统能很好地实现多轴联动位置控制。
[1] 薛培军,刘冬敏.浅谈运动控制的发展现状及应用前景[J]. 中州大学学报,2007, 24(1): 125-126.
[2] Chen S L,Chou C Y. Contouring control of multi-axis motion systems for NURBS paths[J]. IEEE Transactions on Automation Science and Engineering, 2016, 13(2):1062-1071.
[3] Yeh S S,Hsu P L. Analysis and design of integrated control for multi-axis motion systems[J].IEEE Transactions on Control Systems Technology, 2003, 11(3): 375-382.
[4] 于杰,王志胜.双电机舵机负载模拟器设计与研究[J].机械与电子,2017, 35(2):28-31.
[5] 安川电机.AC伺服驱动器E-V系列用户手册[Z].
[6] 龚文杨,朱细敏,李灿.基于PLC的多轴同步跟随控制系统实现[J].电子技术与软件工程,2017(19): 110-111.
[7] 黎小巨,黄健求,庄远向,等.基于TMS320LF2407的不对称负载下的位置同步控制[J].机械工程与自动化,2011(1): 135-137.
[8] 常有明,张臣,陈秋健.基于FANUC PICTURE的虚拟轴坐标显示界面开发方法研究[J].制造技术与机床,2017(5): 169-173.
[9] 孔艳,邹华海,苗卫博,等.运动控制器在立轴双端面磨床上的应用[J].精密制造与自动化,2015(2):37-39.